
自适应滤波之RLS算法(含MATLAB+Python代码)
前言
LMS算法的主要优点在于它的计算简单,然而为此付出的代价是缓慢的收敛速度,特别是当自相关矩阵\(\pmb{\varGamma}_M\)的特征值具有较大范围时。从另一个观点来看,LMS算法只有单一的可调参数,即步长参数\(\Delta\)用于控制收敛速度。因为出于稳定的目的,步长是有限制的,所以应对与较小特征值方式的收敛速度较慢。为了较快的收敛,就需要设计出包含额外参数的更加复杂的算法。接下来即是将要介绍的RLS算法。
RLS算法
定义在\(n\)时刻的长度为\(M\)的滤波器系数向量为:
同样地,在\(n\)时刻的输入信号向量表示为:
当\(n<0\)时,\(x(n)=0\)。
递归最小二乘方问题现在可以描述为如下:假如我们观察到的向量为\(\pmb{X}_M(l),l=0,1\\,\cdots,n\),此时将误差定义为期望序列\(d(l)\)和估计\(\hat{d(l,n)}\)之间的差值:
而我们希望的是确定使误差幅度平方的加权和:
达到最小时的滤波器系数向量\(\pmb{h}_M(n)\),其中\(w\)是范围为\(0<w<1\)的加权因子。使用加权因子的目的是加重最近数据点的权值,这样使得滤波器系数能够适应时变的数据统计特性,这可以通过对过去的数据使用指数加权因实现。
\(\xi_M\)关于滤波器系数向量\(\pmb{h}_M(n)\)的最小化可以产生出线性方程组(证明过程附在后面)
其中,\(\pmb{R}_M(n)\)是信号自相关矩阵,定义为
\(\pmb{D}_M(n)\)是互相关向量
方程式(1.5)的解为
相比LMS中的自相关矩阵,\(\pmb{R}_M(n)\)不是Herimitian矩阵,而\(\pmb{\varGamma}_M\)是。对于小的\(n\)值,\(\pmb{R}_M(n)\)可能是病态的,因而它的逆是不可求的。在这种情况下,习惯在初始化时要将\(\pmb{R}_M(n)\)加上矩阵\(\delta\pmb{I}_M\),其中,\(\pmb{I}_M\)是单位阵,\(\delta\)是小的正常数。给过去的数据加上指数加权,\(\delta\pmb{I}_M\)增加的影响就会随着时间消失。
首先\(\pmb{R}_M(n)\)的递归更新方程可以写为
因为我们需要\(\pmb{R}_M(n)\)的逆,所以运用矩阵求逆定理,可以得到
这样,\(\pmb{R}_M^{-1}(n)\)就可以递归的计算。
为了方便起见,定义\(\pmb{P}_M(n)=\pmb{R}_M^{-1}(n)\),则式(8)可以重写为:
还可以定义一个\(M\)维的向量\(\pmb{K}_M(n)\),称其为卡尔曼增益向量,其形式为
其中,\(\mu_M(n)\)是一个标量,定义为
利用这些定义,式(10)就变为
此时,我们在上式(1.14)右乘\(\pmb{X}_M^*(n)\),就可以得到比较惊喜的结果
因此,卡尔曼增益向量也可以定义为\(\pmb{P}_M(n)\pmb{X}_M^*(n)\)。
将向量\(\pmb{D}_M(n)\)的递归更新方程可以写为
现在将\(\pmb{D}_M(n)\)的更新方程(16)和 \(\pmb{P}_M(n)\)的更新方程(10)带入式(11)中,可以得到
在上面的式子最后一项中,\(\pmb{X}^t_M(n)\pmb{h}_M(n-1)\)是自适应滤波在n时刻的输出,该值是基于n-1时刻的滤波器系数得到的。因为
并且
因此\(\pmb{h}_M(n)\)的更新方程可以表示为
或者等价于
附
证明:设
若\(\pmb{x}_0\)为\(\pmb{A}\pmb{x}=\pmb{b}\)的最小二乘解,则它应是\(f(\pmb{x})\)的极小点,从而
对上式求导可得:
最终得到方程组:
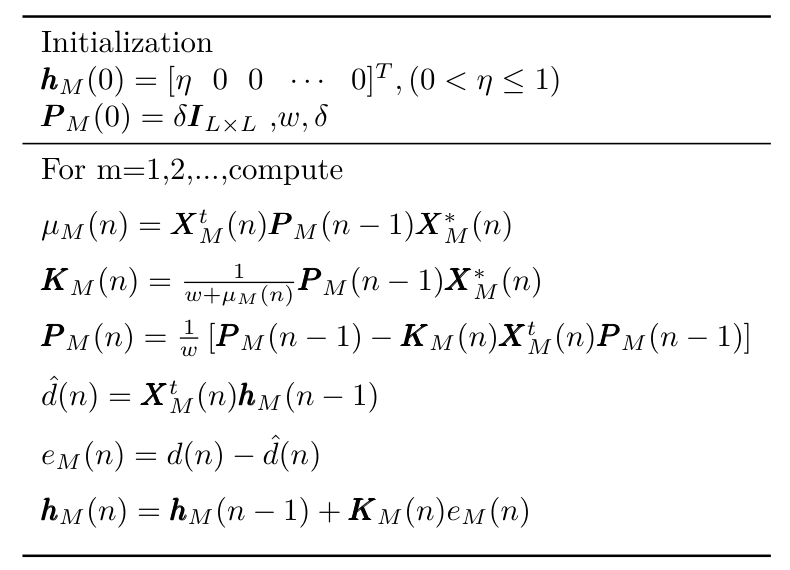
算法流程表
MATLAB代码
close all;clear all;clc;
%% 产生测试信号
fs = 1;
f0 = 0.02;
n = 1000;
t = (0:n-1)'/fs;
xs = cos(2*pi*f0*t);
SNR = 10;
ws = awgn(xs, SNR, 'measured');
%% main
w = 0.1;
delta = 2;
[d,error_vect,estimate_h] = RLS_func(w,xs,ws,delta);
figure
subplot(211)
plot(d)
grid on;ylabel('幅值');xlabel('时间');
ylim([-1.5 1.5]);title('RLS滤波器输出信号');
subplot(212)
plot(ws)
grid on;ylabel('幅值');xlabel('时间');title('RLS滤波器输入信号');
ylim([-1.5 1.5]);
%% RLS函数
function [d,error_vect,estimate_h] = RLS_func(w,xs,ws,delta)
% 参数初始化
L = 32; %滤波器长度
n = 1000;
X_n = ws;
d_n = xs;
P_M = delta*eye(L,L);
estimate_h = zeros(L,1);
estimate_h(1,:) = 1;
error_vect = zeros(n-L,1);
for i =1 : n-L
x_vect = X_n(i:i+L-1);
mu = x_vect.' * P_M * conj(x_vect);
K = P_M * conj(x_vect) / (w + mu);
P_M = (P_M - K * x_vect.' * P_M);
estimate_d = x_vect.' * estimate_h;
error = d_n(i) - estimate_d;
error_vect(i,:) = error;
estimate_h = estimate_h + K * error;
end
d = inf * ones(size(X_n));
for i = 1:n-L
x_vect = X_n(i:i+L-1);
d(i) = estimate_h.' * x_vect;
end
end
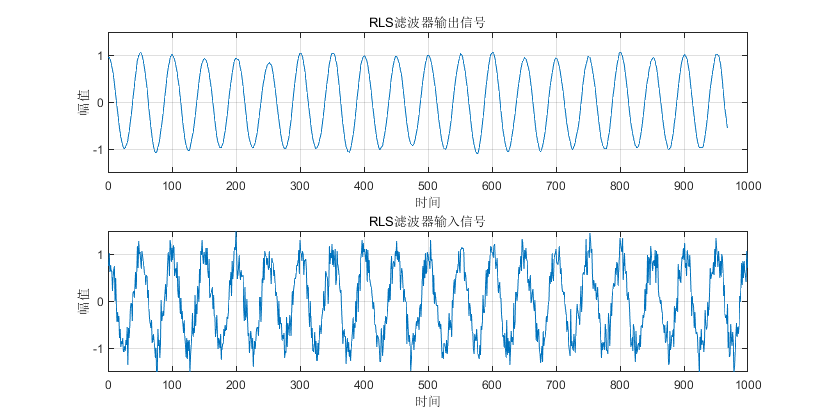
简单实验结果:
Python实验代码
import numpy as np
import matplotlib.pyplot as plt
# 信号加噪
def awgn(x, snr):
snr = 10 ** (snr / 10.0)
xpower = np.sum(np.abs(x) ** 2) / len(x)
npower = xpower / snr
if type(x[0]) != np.complex128:
return x + np.random.randn(len(x)) * np.sqrt(npower)
else:
return x + np.random.randn(len(x)) * np.sqrt(npower / 2) + 1j * np.random.randn(len(x)) * np.sqrt(npower / 2)
def RLS_func(w,xs,ws,delta,L):
# L = 32 #滤波器长度
n = 1000
X_n = ws
d_n = xs
P_M = np.multiply(delta,np.identity(L))
estimate_h = np.zeros(L)
estimate_h[0] = 1
error_vect = np.zeros(n-L)
for i in range(0,n-L):
x_vect = X_n[i:i+L]
mu = np.dot(np.dot(np.transpose(x_vect),P_M),np.matrix.conjugate(x_vect))
K = np.divide(np.dot(P_M,np.matrix.conjugate(x_vect)),(w+mu))
P_M= np.subtract(P_M,np.dot(np.dot(K,np.transpose(x_vect)),P_M)) / w
estimate_d =np.dot(np.transpose(x_vect),estimate_h)
error = d_n[i] - estimate_d
error_vect[i] = error
estimate_h = estimate_h + np.dot(K,error)
d = np.ones(X_n.shape) * np.nan
for i in range(0,n-L):
x_vect = X_n[i:i+L]
d[i] = np.dot(np.transpose(estimate_h),x_vect)
return d,error_vect,estimate_h
if __name__ == '__main__':
snr = 10
n = 1000
fs = 1
f0 = 0.02
t = np.arange(n)/fs
xs = np.cos(2*np.pi*f0*t)
ws = awgn(xs, snr)
L =20
w = 0.1
delta = 0.2
xn = ws
dn = xs
d,error_vect,estimate_h = RLS_func(w,xs,ws,delta,L)
plt.figure()
plt.subplot(211)
plt.plot(t, ws)
plt.subplot(212)
plt.plot(t, d)
plt.figure()
plt.plot(error_vect)
plt.show()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号