多指灵巧手MoveIt!与Gazebo联合仿真框架搭建
至于为什么叫框架,一是因为灵巧手的3维模型没有按照基本的设计要求画,正常来说,设计机器人机构之前应该设计好机构需要多少个自由度/DOF,每个自由度是旋转/revolute类型还是滑移/prismatic类型,各个关节的自由度限位/limits,各个连杆的长度/a,每个自由度之间的扭角/α,偏移/d,整个机器人的工作空间/workspace等等;二是当前搭建的框架能实现的function和控制很基础,灵巧手其实是一个多机器人协同的系统,需要在MoveIt!的代码上进行更改,至少抓取矩阵这种概念在MoveIt!上是没有的,还有很多地方需要修改。
总的来说,当前的框架不够deep,但基本的模样已经有了。
该博客同时将帮助更加顺利的完成以下工作,希望能对各位有所帮助,源码链接见文末:
-
单纯的通过ROS控制Gazebo中的机器人模型
-
通过MoveIt!直接控制现实中的机器人
-
MoveIt!与Gazebo联合仿真
博客目录:
-
使用Solidworks设计灵巧手,通过sw2urdf插件生成ROS包
-
机器人MoveIt!配置文件生成
-
URDF适配Gazebo的简单修改
-
ROS节点控制Gazebo中机器人模型
-
Moveit!控制现实中的机器人
-
MoveIt!与Gazebo联合仿真
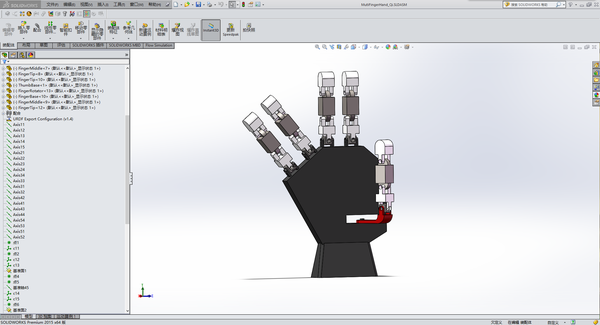
Ⅰ. 使用Solidworks设计灵巧手,通过sw2urdf插件生成ROS包
用Solidwork设计,一是这样相对于自己搭URDF更专业,二是有插件支持,方便生成URDF。
几个需要注意的点:
-
每个link都单独放入总装配体中,最好不要用子装配体
-
设计好装配体后,使用sw2urdf插件定义各个关节连杆的从属关系,在这之前,使用D-H方法自己画出各个轴和坐标系,不要自动生成,这样生成的URDF99%会错位。另外旋转轴的类型对于机械臂这种机器人一般选择revolute,移动的小车这种机器人就选择continous,以上两者的区别在于如果选择前者会在URDF文件中定义关节限位,固定的关节选择fixed。
-
如果你的机器人底座是固定的,那么你最好把base_link整体z坐标大于0,不然到时放到Gazebo的时候会与地面干涉,造成不必要的麻烦。
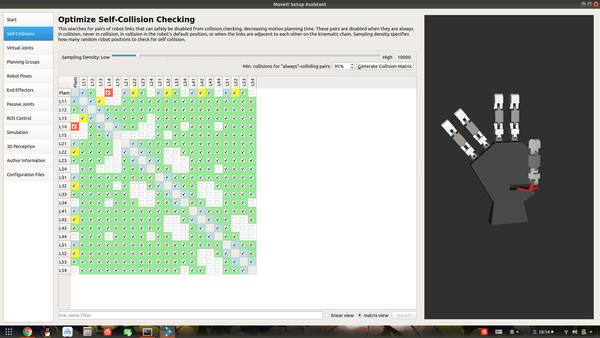
Ⅱ. 机器人MoveIt!配置文件生成
现在从Windows转到Ubuntu,将前面生成的URDF包放在工作空间, 前提是已经装好了MoveIt!,建议使用源码安装,方便阅读和修改源码.
打开MoveIt_Setup_assitants,参照官方文档设置
roslaunch moveit_setup_assistant setup_assistant.launch
加载URDF文件,按照顺序一一设置即可,后面要修改也再次可以加载MoveIt!配置文件修改.其中有几个要注意的地方:
-
干涉检测那一部分自动生成后转到矩阵表示,检查是否符合自己的要求
-
virtual_joint的目的一般是为了将base_link和world坐标系相固连,在后面修改URDF的部分中为适配Gazebo已经添加了base_link和world的虚拟关节,所以在这里不再需要添加,各位自行决定.
-
planning_group按照每个手指分组.
-
Robot_Pose这一部分可以检测你的机器人关节的限位,如果动不了,一般是URDF中关节硬限位和软限位没有设置好.
-
ROS_Control这块根据具体的控制器类型选择,先按组自动添加,然后再修改控制器类型,如果和Gazebo联合仿真的话,选择position_controllers/JointTrajectoryController这一类型,原因是由MoveIt!和仿真环境或实际机器人的通信方式所决定,具体可在MoveIt!官网介绍.当然以上两者联合仿真的话也不一定就要position_controllers/JointTrajectoryController这种控制器,你也可以选择其它控制器,然后将MoveIt!的client发出的action消息写个Server端进行解析,然后用过ROS_Control进行Gazebo控制.
move_group talks to the controllers on the robot using the FollowJointTrajectoryAction interface. This is a ROS action interface. A server on the robot needs to service this action - this server is not provided by move_group itself. move_group will only instantiate a client to talk to this controller action server on your robot.
-
Simulation这部分生成适配Gazebo的URDF文件,在原来基础上添加了传动/Transmission和连杆惯量以及gazebo_ros_control插件,这样才能真实的模拟真实物理环境,把这个URDF文件作为后面用的机器人描述文件.
Ⅲ. URDF适配Gazebo的简单修改
-
添加一个virtual_link用以连接base_link和world,类型为固定.
-
设置好关节的软硬限位和旋转方向.
-
检查惯性等属性是否正确,gazebo_ros_control可以设置你的机器人的命名空间,注意这个命名需要和之后的controller.yaml文件和MoveIt!配置生成的ros_control.launch中的命名空间一致,不然到时候节点会找不到另一个命名空间的控制器.
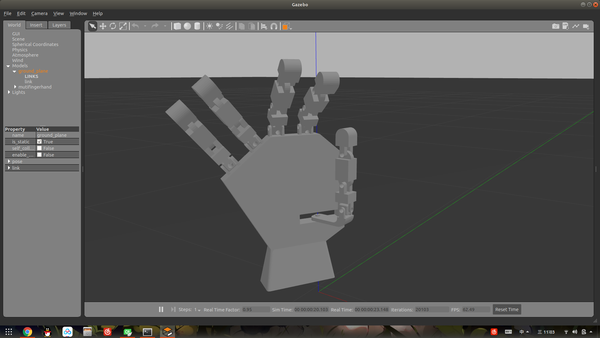
Ⅳ. ROS节点控制Gazebo中机器人模型
要实现ROS节点控制Gazebo中机器人模型只需要运行gazebo.launch和一个自定义的关节角发布节点.
MoveIt!配置生成的ROBOT_moveit_config包中含有诸多launch文件和config文件,建议都看看以了解其原理.
gazebo.launch负责加载Gazebo中的空世界模型和机器人URDF模型,以及controller_manager,运行该文件会加载/config/ros_controllers.yaml中的参数到ROS的参数服务器,ros_controllers.yaml是较为关键的一环,格式不对会导致运行出错.比如我之前配置MoveIt!的时候,如果选择控制器类型为position_controllers/JointPositionController,可以这样写(部分代码):
mutifingerhand:
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
J11_controller:
type: position_controllers/JointPositionController
joint: J11
pid: {p: 100.0, i: 0.01, d: 1}
J12_controller:
type: position_controllers/JointPositionController
joint: J12
pid: {p: 100.0, i: 0.01, d: 1}
以上的控制器名就是之前在MoveIt!中配置的名字,也和ros_control.launch中的控制器名一致,注意我这里的命名空间是mutifingerhand,所以在ros_control.launch和URDF中的命名空间也当是如此.
接下来就是写一个发布各关节控制的消息发布节点,根据Gazebo的官方示例,消息类型为std_msgs::Float64,话题名为/mutifingerhand/J11_controller/command,参照这样的格式写即可.
Ⅴ. Moveit!控制现实中的机器人
要实现ROS节点控制控制现实中的机器人只需要运行demo.launch和一个自定义的基于moveit的规划节点.
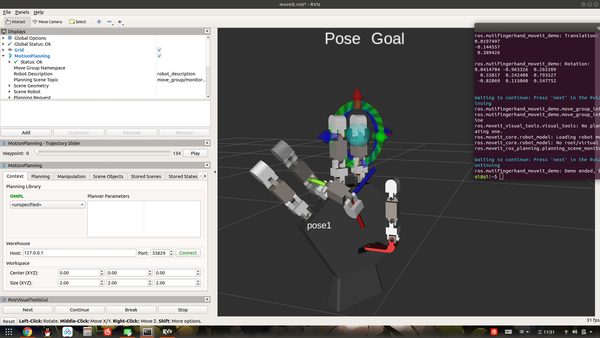
demo.launch加载机器人RVIZ配置文件和move_group等节点,其中在下面代码中有个fake_execution决定了控制实际机器人或者仿真,还是直接进行fake_control,在这里把它改为false.
<include file="$(find mutifingerhand_moveit_config)/launch/move_group.launch">
<arg name="allow_trajectory_execution" value="true"/>
<arg name="fake_execution" value="true"/>
<arg name="info" value="true"/>
<arg name="debug" value="$(arg debug)"/>
<arg name="pipeline" value="$(arg pipeline)"/>
</include>
另外,上文中讲到了MoveIt!通讯的机制,MoveIt!作为client需要一个机器人端的Server与其对应,同时ros_controllers.yaml控制器类型需要修改成position_controllers/JointTrajectoryController,注意这些都要写在controller_list下,具体结构参考下面的代码:
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
controller_list:
- name: finger1_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- J11
- J12
- J13
- J14
- J15
和前面Gazebo端的ros_controller.yaml有点类似,但是不同.大部分博文中这两个yaml文件被分成了两个,但其实放在同一个文件里也可以,各取所需,反正都是要加载到ROS参数服务器的.
Server端如何写,我这里有个参考,完整代码移步文末的Github链接.
#include <ros/ros.h>
#include "actionlib/server/action_server.h"
#include "actionlib/server/server_goal_handle.h"
#include <control_msgs/FollowJointTrajectoryAction.h>
class ControllerServerAction
{
protected:
ros::NodeHandle nh_;
actionlib::ActionServer<control_msgs::FollowJointTrajectoryAction> action_server;
actionlib::ServerGoalHandle<control_msgs::FollowJointTrajectoryAction> goal_handle_;
control_msgs::FollowJointTrajectoryResult result_;
public:
ControllerServerAction(std::string name) :
action_server(nh_, name, boost::bind(&ControllerServerAction::pubGoalJoints, this, _1), false)
{
action_server.start();
至于自定义的基于moveit的规划节点,参照MoveIt!官方教程写就行,记得加上代码:
// Moving to a pose goal /* Uncomment below line when working with a real robot */
move_group.move();
这是让机器人发送规划的轨迹的关键一步.
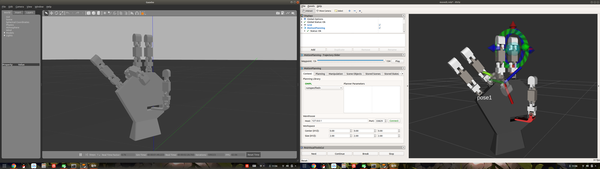
Ⅵ. MoveIt!与Gazebo联合仿真
关键在于ros_controller.yaml的配置,Gazebo端和MoveIt!端的controller.yaml文件可以放在一个文件,两者的格式分别就是上文中第四第五节中讲到的格式,运行demo_gazebo.launch文件同时加载Gazebo和MoveIt!,不需要写Server了,Gazebo这端默认作为了Server端.要控制的话写一个上文中第五节一样的节点就行.
控制器类型得是position_controllers/JointTrajectoryController.
如图我这里是控制了第四根手指弯曲,把PID参数调到机器人没有抖动,先调P,然后调ID参数,I负责消除稳态累计误差,D负责噪声影响.
Github项目链接
如有问题可在评论区留言,或者私信,或者本人主页咨询或者Github提出,欢迎交流探讨.
不过这种东西也就是工具,精髓在于MoveIt!的源码,所以是建议大家源码安装.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号