HIT手 | 机械电气构造简述和微分运动学及静力学的简单推导
机械结构电气构造简述
HIT手有四个手指,每个手指4个关节,其中第一和第二个关节正交,第三和第四个关节机械耦合,故只有3个自由度,另外大拇指多了一个相对手掌运动的自由度,故一只手掌总共有13各个自由度。
第一和第二个轴是通过两个BLDC/无刷直流电机带动两个锥齿轮驱动差动轮系,通过两个电机的正反转实现轴1和轴2的独立转动。具体这里不再说明,上个图就明白了。三四轴通过平面四连杆机构实现耦合。
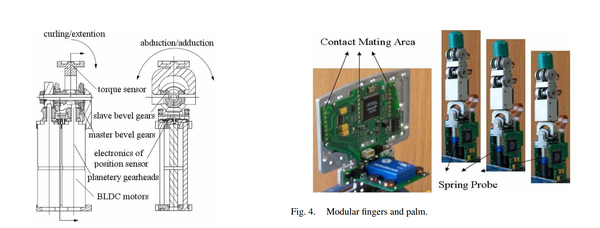
使用霍尔传感器检测关节位置和速度,另外还有触觉传感器,力/力矩传感器(肯定是六维的啦)等等,使用模数转换将模拟信号转化为数字信号,避免信号受到干扰(这种低压非强磁环境都做的这么严格,膜拜一下),使用了DSP和FPGA作为控制器,另外一些高速总线等等,这里都不详细分析了(DSP和FPGA俺暂时也不会,有机会学学)。另外贯穿的电路板是柔性的(我这不是废话吗)。
以上参考于HIT手,HIT/DLR手,DLR手相关论文,感兴趣的可谷歌学术自行搜索。
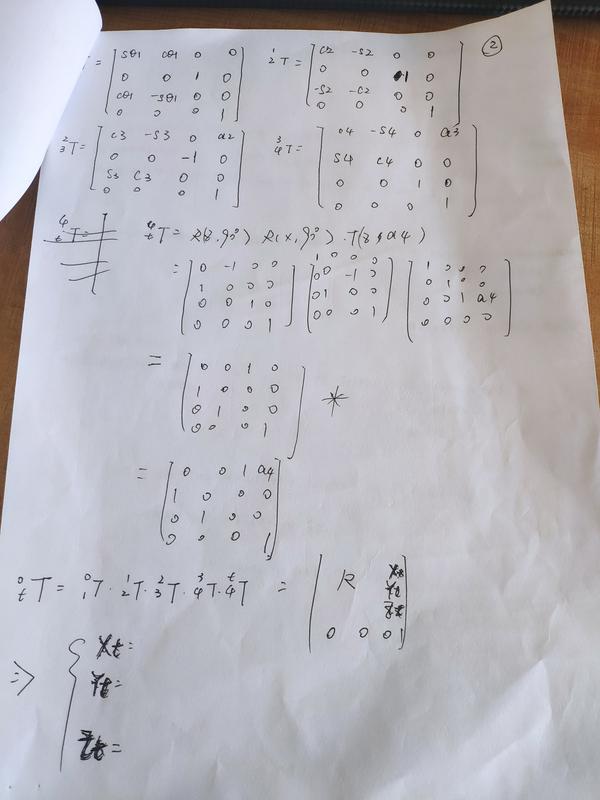
下面的推导公式矩阵太多了,打公式太累,写了你们也不会看这么简单的东西,就放照片吧,当个纪念
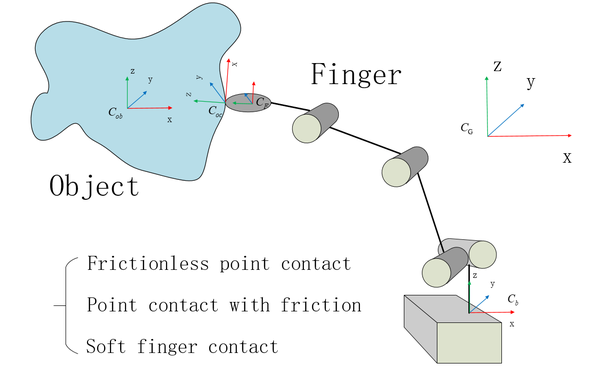
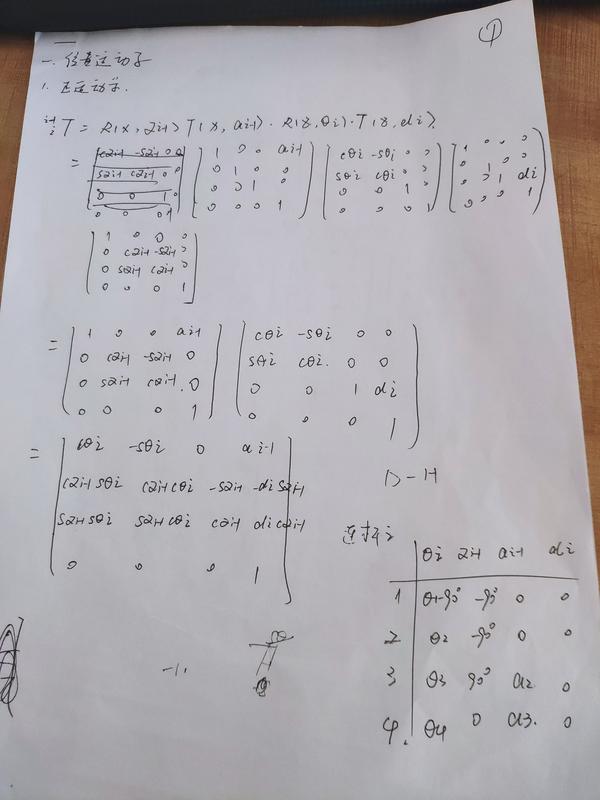
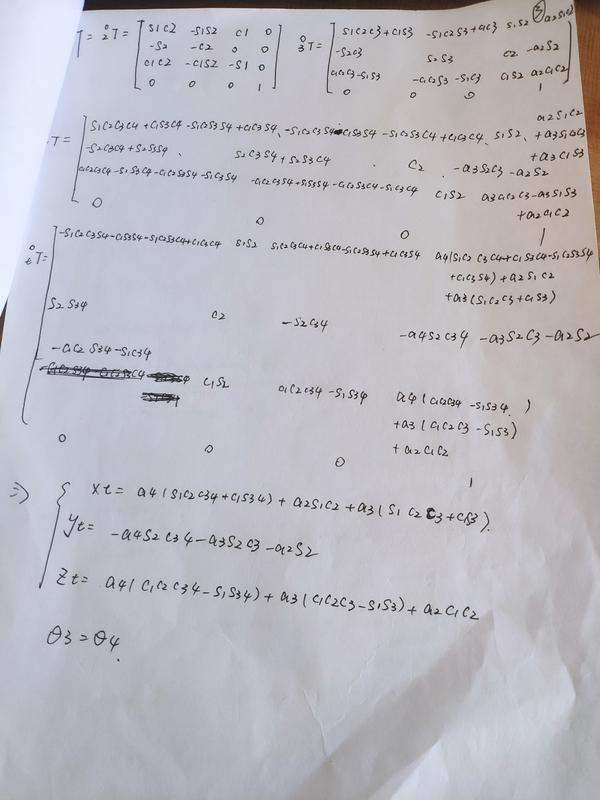
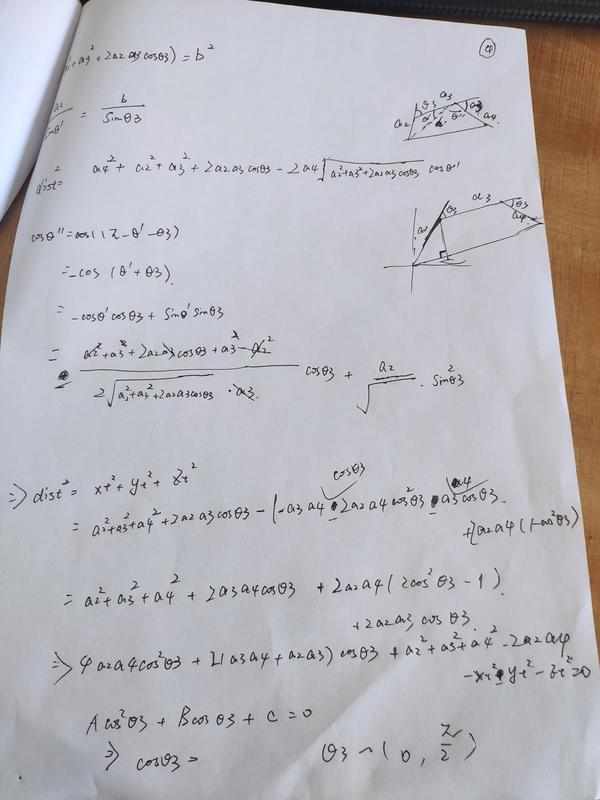
位置运动学
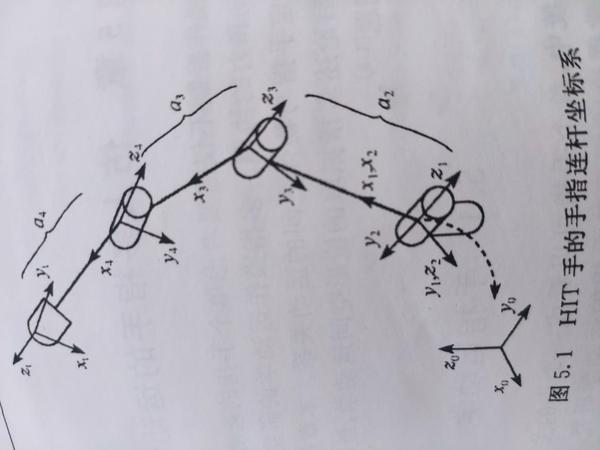
DH模型
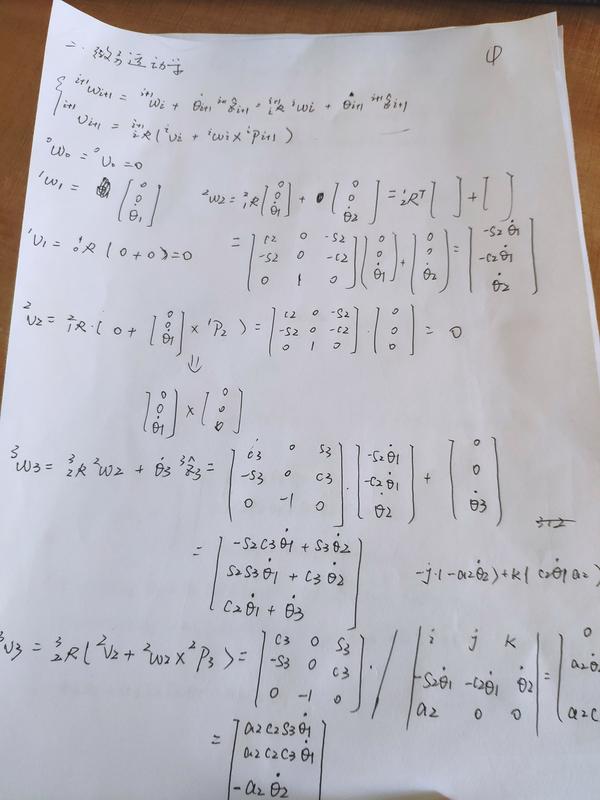
微分运动学
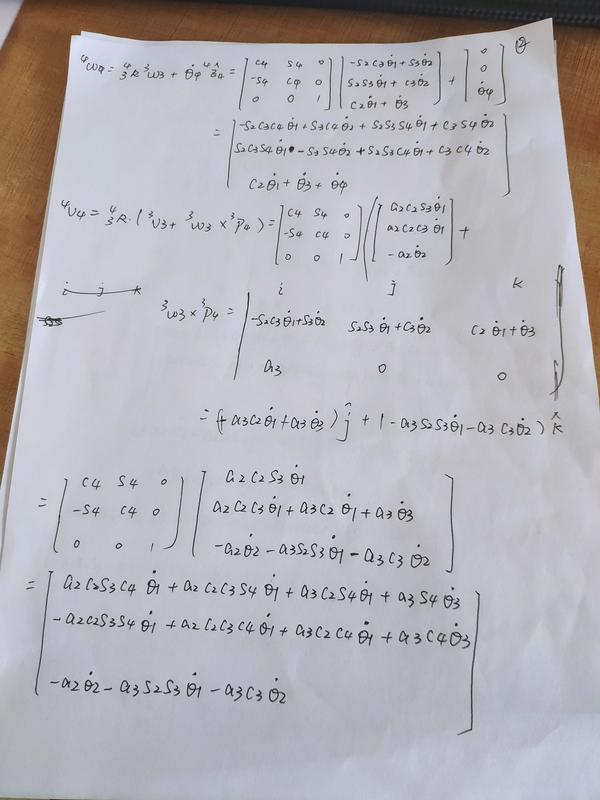

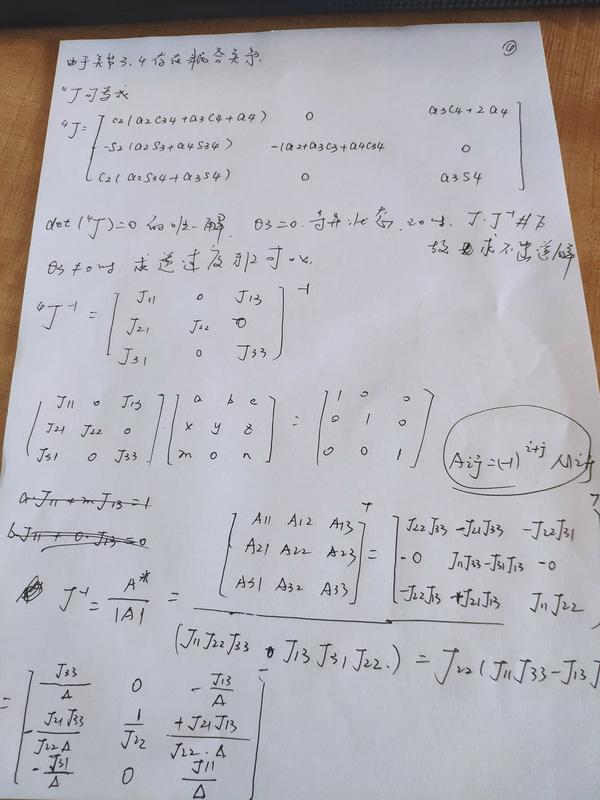
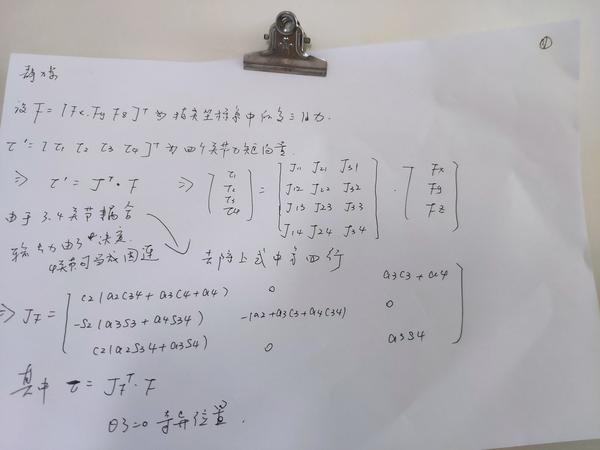
静力学
由虚功原理可以推出静力学和微分运动学具有对偶关系,接下来力雅可比就很好得出了

 浙公网安备 33010602011771号
浙公网安备 33010602011771号