硬件篇-04-SLAM移动底盘机械设计
这篇比较水,发出来主要是为了呼应专栏主题,既然是实现,那各个方面都得讲一下不是。
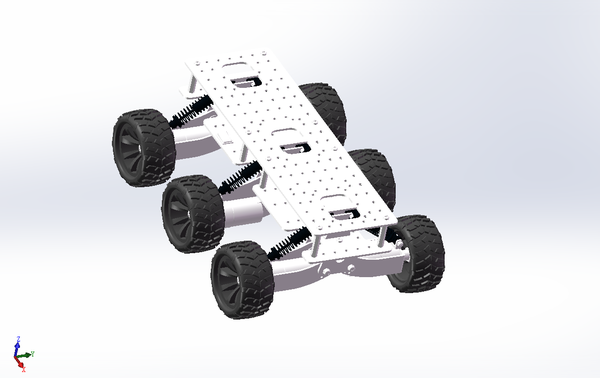
底盘SW模型
淘的,主要是看上了它有弹簧阻尼器,适合野外,抗震,但是这种底盘结构转向起来比较吃力。是再有个全轮转向那就无敌了,没有概念?那就想象一下电影《流浪地球》里运火石的车,它就是全轮原地转向滴。貌似美国的火星车也是全轮转向。
二维图纸
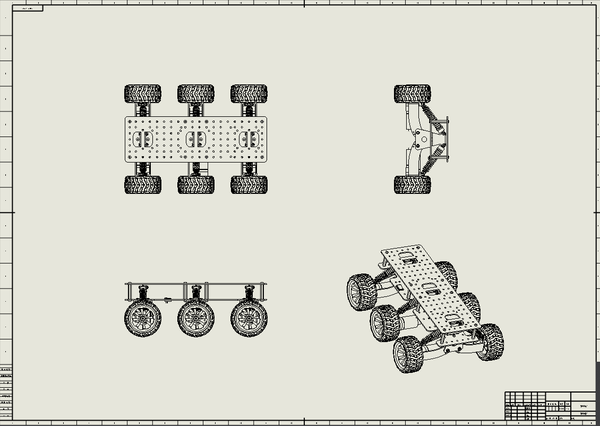
不过,这上面的平台太小,装不下那么多东西,我就自己加工了两块亚克力板。
我本科搞机械设计比较少,因为是自己做,这里的图搞得不是很专业,也没按标准来,当年的机械设计课设被某赵姓老师喷惨了。大佬看到勿喷。
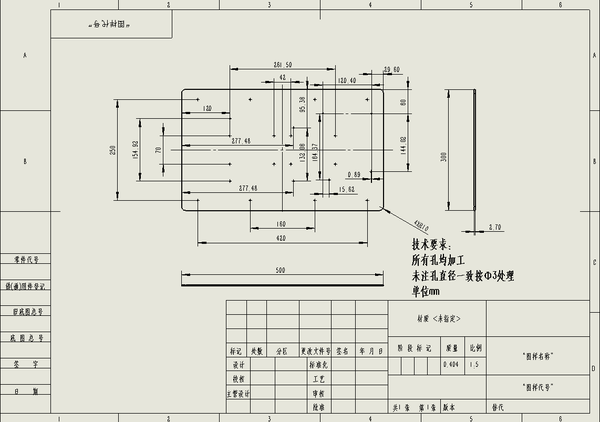
中间层
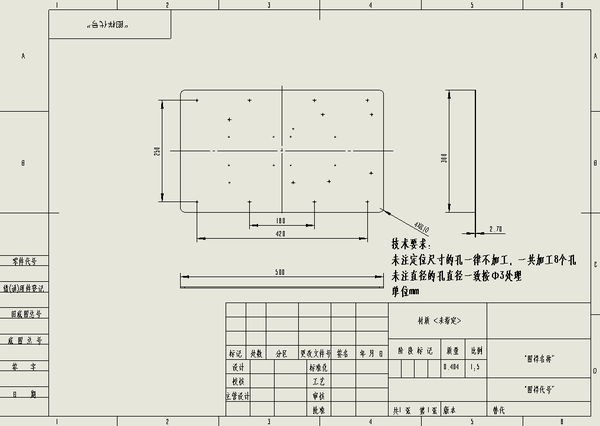
顶层
连接安装全靠螺栓和锁紧螺母,以及铜柱emmm...
摄像头也是用螺柱连在亚克力上的,所以会有微小的晃动,没办法,没得钱。锂电池和铝壳电源拿的3M胶黏在底盘铝板上,感觉有点随便。

拿到亚克力板当天组装起来的图,那时还没焊走线
硬件篇至此完结,下篇见。
预告:轨迹规划,位姿控制,碰撞检测,自主导航 ......

 浙公网安备 33010602011771号
浙公网安备 33010602011771号