硬件篇-03-SLAM移动底盘电气设计
最近因为在忙毕设,专栏已经1个多月没更,对于托更我很抱歉。不过这几周真的没什么时间,Rick&Morty的最新集我到现在都还没看哈哈。
现在毕设已经搞得差不多了,水专栏文章的快乐生活就要开始了。这篇主要讲设计SLAM小车的控制板相关,偏硬件单片机和电气设计,不感兴趣的同学可以自行略过。
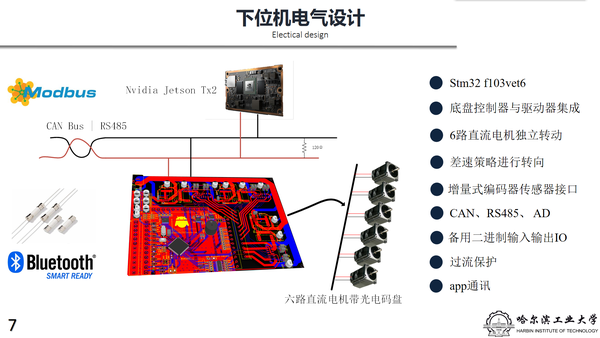
因为我的SLAM小车底盘需要有6路电机控制和旋转编码器反馈,以及电机驱动功能,TX2上的IO口和PWM等外设是不够用的,所以决定自己设计一个集电机驱动和控制的PCB,这样更方便、专业一点,具体功能如下图(从我中期答辩的PPT里取得一张)所示:
MCU选取
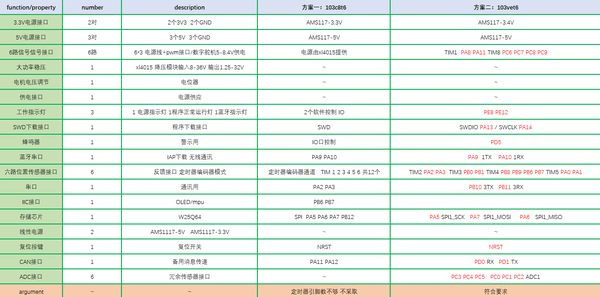
选用了ST的Stm32f103vet6,功能列表如下,使用引脚可能与实际有些偏差,后期做了一些修改。用F1就够了,F4就不需要了。
通讯接口
-
CAN BUS
-
RS485/TTL
-
HC05蓝牙串口
CAN收发器用的TJA1040,RS485收发使用MAX485,我也不知道为什么会用RS485和串口这种东西,用CAN不香吗?也许是我手痒痒吧,榨干stm32的每一个引脚,几十块钱的芯片不能浪费资源啊。原理图如下:
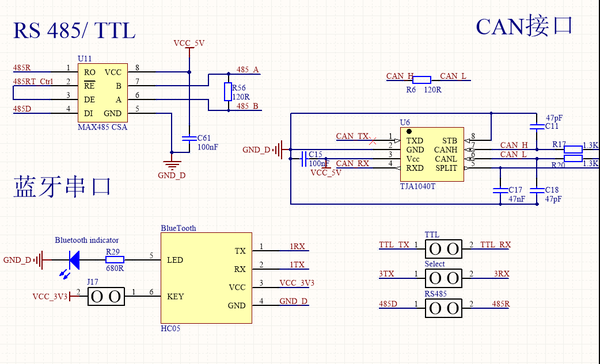
为了更好的用上RS485,我还专门在TX2 git了一个Modbus源码,要不是为了你那点差模信号的稳定性,还不如直接用TTL,至少人家还是全双工。
电源设计
线性电源AMS1117-3.3/5V各一个;XL4015调压模块3个,每个供电一个L298N,对应两个电机,至于为什么有了L298N还要用XL4015,主要是为了硬件调电压更安全一点,控制得也更细腻一点,可以适配不同额定电压的电机。设计PCB时注意单点接地,低压的地方铺上铜箔,驱动的地方又有电感又有MOS高速开关闭合就别放了。说实话我把驱动和控制部放在一起还是有点风险的,下面这句可以不看纯吐槽->去年搞大学生方程式电机控制器的时候那个电磁干扰简直让我怀疑人生,真的怀疑AMK你真的过了EMC吗?真的给我留下了巨大的心理阴影。
还有就是pcb上加上保险丝,防止电机堵转烧坏电机。
原理图就不放了,按照datasheet上的来设计,注意感性负载的续流问题,电容容值等等。L298N得买好散热片。说到这里一把泪,本来我是不用设计这个底盘的,直接用实验室现成的底盘多好,电机控制器也是商业的,弄到现在好像在设计玩具车一样。
至于TX2的19V供电电源,我是用的一款24转19V铝壳非隔离电源,无负载的情况下拿万用表测试了一下输出18.9V,还行用了这么久也没什么问题。不过有条件还是买好的,毕竟另一边连的可是几千的TX2啊。
整车供电,淘了一块20000mAh的锂电池,同时输出24V,12V,5V USB;分别用于TX2,单片机,炒鸡大的显示屏供电,感觉这就是淘宝卖家为我量身定制的,充满电可以一直用3/4个小时,这就比较nice。
电机选型
选的传动比1:34的直流带光电码盘电机,旋转编码器分辨率360,传到电机输出轴就乘一个34的传动比,实验了一下,效果还行,比较nice,记得使用stm32的硬件编码器模式捕获传感器的A/B相,没必要自己写输入捕获。电机额定电压12V。至于转速就不是问题,你这个SLAM小车还能跑的多快,你稍跑快一点SLAM就报“Tracking Lost”了。
电机控制
没什么好说的,没有梦想的人生就是咸鱼,没有闭环的电机就是玩具马达。
增量式PID一顿搞,P调的有点大(为了降低稳态误差),底盘起步时超调比较大。这可不行,程序一开始运行,你一个“弹射起步”我SLAM立马跟丢,最后为了求稳加了一个cmd_vel队列,取个平均值,美其名曰targetSpeedSmooth,那点延时牺牲就牺牲了呗,像我这样的菜鸡做不到高速SLAM那就只能求稳。
蓝牙调试
调试挺方便的,Android上有一个叫蓝牙串口的App,很不错,感谢原作者。
其它
小细节就不讲了,我们下篇见。欢迎下方留言讨论。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号