捷联惯导和组合导航学习笔记
捷联惯导和组合导航学习笔记
坐标系定义与符号约定
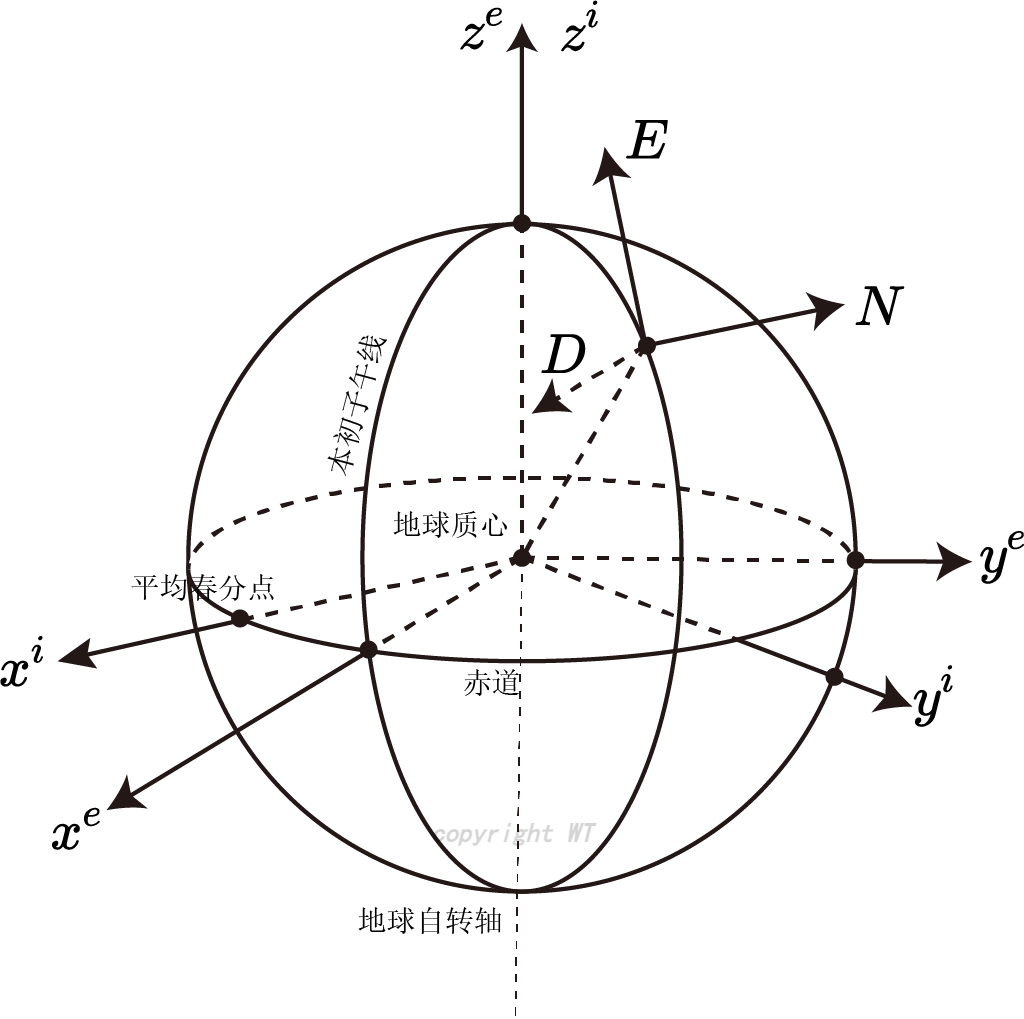
惯性坐标系(\(i\)系)
\(O-x_iy_iz_i\) ,取地球中心为坐标原点,\(ox\)轴是地球围绕太阳公转平面的黄道平面和地球赤道平面的交线,\(oy\)轴用右手规则确定,\(oz\)轴沿着地球自转轴方向。地心坐标系与地球不固连,不随地球转动,惯性期间测得的物理量是相对于惯性坐标系的。
地球坐标系(\(e\)系)
\(O-x_ey_ez_e\),地球中心为原点,\(oz\)轴沿着地球自转轴方向,\(ox\)是赤道平面与本初子午面交线,\(oy\)轴沿用右手规则。也叫地心地固坐标系。地心地固坐标系和地球固连,与地球一起相对惯性坐标系以地球的自转角速度进行转动。
地理坐标系(\(g\)系)
\(O-x_gy_gz_g\),地理坐标系也叫做站心坐标系,常用的是“东北天”,“北东地”坐标系,一般描述横滚角、俯仰角和航向角,都是定义在\(g\)系。
载体坐标系(\(b\)系)
\(O-x_gy_gz_g\),载体坐标系与载体固连,原点在载体中心,一般遵循“右前上”的准则。
传感器坐标系
在不考虑安装偏角的情况下,一般与载体坐标系重合。、
导航坐标系(\(n\)系)
导航坐标系是惯性导航算法的基本参考系,运动物体在导航坐标系内进行位置、速度、姿态确定,可选取e系或g系做为导航系。在e系内导航,可以直接确定地心地固系下的导航参数,便于和GNSS 等大地测量手段相结合,在惯性导航中,经常将地理坐标系g作为导航坐标系。值得注意的是,导航坐标系只是一个“虚”的概念。
WGS84坐标系
wgs84表示的就是地理经纬度,也叫经纬高坐标系(经度(longitude),纬度(latitude)和高度(altitude)LLA坐标系)。
符号约定
\(w_{ib}\),\(b\)系相对于\(i\)系的转动。
\(C^n_b\) ,表示从\(b\)系到\(n\)系的变换矩阵。
四元数微分方程与求解
关于四元数的基础知识在这里不赘述,相关书籍和资料都有,这里主要记录自己遇到的一些问题。
四元数的微分方程为:
其中
求解微分方程的方法有很多,这里主要使用的龙格库塔法,有一阶龙格库塔法和四阶龙格库塔法,在工程上应用广泛的高精度单步算法,其中包括著名的欧拉法,用于数值求解微分方程。
由一阶龙格库塔法\(y_{n+1}=y_n+h\cdot y'\) ,可以得到四元数微分方程的解:
这里定义\(R=I+W\)为状态转移矩阵。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号