相机标定之四个坐标系及其关系
像素坐标系、图像坐标系,相机坐标系,世界坐标系。
1 像素坐标系:
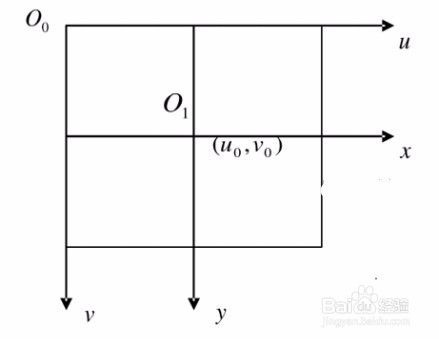
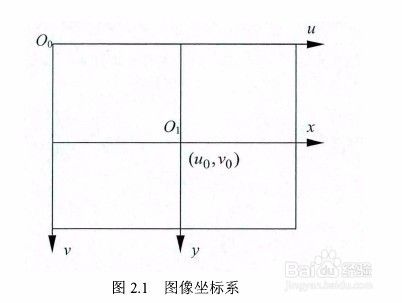
如下图所示:像素坐标系u-v的原点为O0,
横坐标u和纵坐标v分别是图像所在的行和列,
在视觉处理库OpenCV中,u对应x,v对应y;
-
2 图像坐标系:
图像坐标系x-y的原点是O1,为像素坐标系的中点,
如图所示:
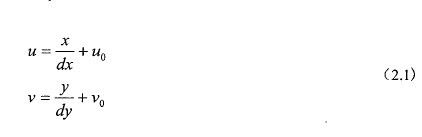
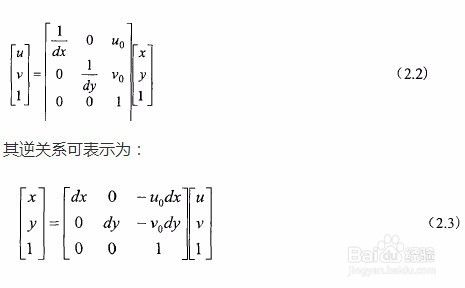
假设(u0,v0)代表O1在u-v坐标系下的坐标,dx和dy分别表示每个像素在横轴x和纵轴y的物理尺寸;
则图像坐标系和像素坐标系的关系如下:
-
-
假设物理坐标系中的单位为毫米,那么dx的单位为毫米/像素。
那么x/dx的单位就是像素了,
即和u的单位一样。
为了方便,
将上式写成矩阵形式:
-
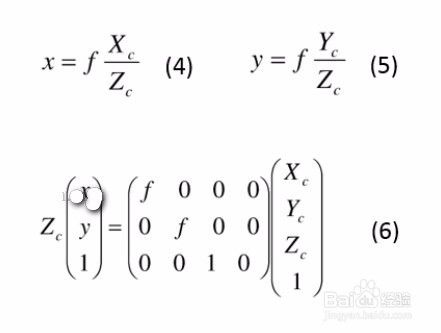
O为摄像机光心,
Zc为摄像机的光轴,和图像平面垂直;
OO1为摄像机焦距;
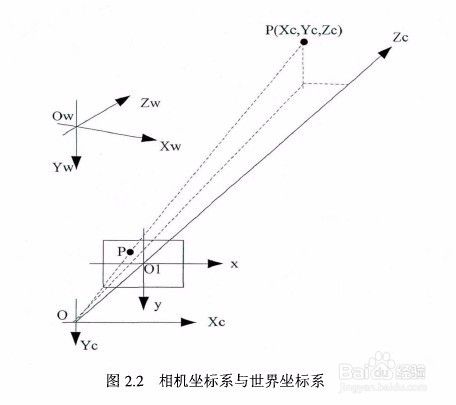
相机坐标系与图像坐标系的关系:
如图所示:
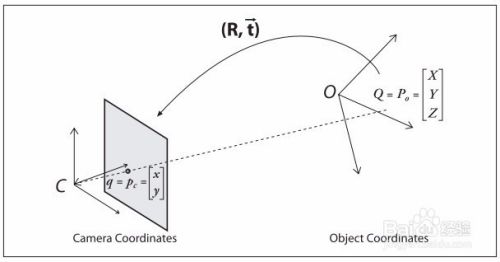
4 世界坐标系:
世界坐标系是为了描述相机的位置而被引入的,
任何维的旋转可以表示为坐标向量与合适的方阵的乘积。
平移向量是第一个坐标原点与第二个坐标原点的偏移量;
在世界坐标系下,有两个重要的参数:
旋转矩阵R和平移向量T

作者:柒月
Q群 :2122210(嵌入式/机器学习)

【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步