『数据结构总结3:平衡树』
 数据结构总结第三篇
数据结构总结第三篇
Preface
本文只介绍\(\mathrm{Binary\ Search\ Tree}\)和算法竞赛中常用的两种平衡树\(\mathrm{Split\ Merge\ Treap}\),\(\mathrm{Splay}\).
Binary Search Tree
定义
二叉搜索树(\(\mathrm{Binary\ Search\ Tree}\))是一棵带点权的有根二叉树,通常用于维护无序数集的若干操作,如查询前驱,后继,第\(k\)大值等.
\(\mathrm{BST}\)的每一个节点\(p\)满足,其左子树所有点点权小于\(v_p\),其右子树所有点点权大于\(v_p\),所以插入,删除,查询等操作都可以轻松实现.
遗憾的是一般的\(\mathrm{BST}\)会被单调数列卡成高度极度不平衡的形态,所有操作的最坏时间复杂度均为\(\mathcal{O}(n)\),所以\(\mathrm{BST}\)的实际意义不大,没有必要学习代码实现.
平衡
平衡树指的是使用各种变换手段让树维持一定的形态,从而保证时间复杂度的各类\(\mathrm{BST}\). 其中平衡的定义分为两种:高度平衡和大小平衡.
\(1.\) \(\alpha-\)高度平衡:\(\mathrm{BST}\)的高度\(h\)满足\(h\leq\log_{\frac{1}{\alpha}}n\).
\(2.\) \(\alpha-\)大小平衡:\(\mathrm{BST}\)的每个节点\(p\)满足\(s(\mathrm{lson}_p)\leq \alpha \cdot s(p),s(\mathrm{rson}_p)\leq\alpha\cdot s(p)\).
这两个定义在替罪羊树的时间复杂度证明中会用到,不过本文不作讨论.
Splay
定义
伸展树(\(\mathrm{Splay}\))又称\(\mathrm{Sleator-Tarjan\ Tree}\),由\(\mathrm{Sleator}\)和\(\mathrm{Trajan}\)在\(1985\)年发明,用伸展操作来保证\(\mathrm{BST}\)的时间复杂度.
其中伸展操作的定义为:对于每次树上操作的节点\(x\),我们直接使用\(\mathrm{BST}\)的方式进行操作,在操作结束后使用相等的时间复杂度进行\(\mathrm{Splay}(x)\)改变树的形态,通过势能分析法证明\(\mathrm{Splay}(x)\)的均摊复杂度正确,从而证明所有操作的均摊复杂度都是正确的.
原理
旋转
在了解如何进行伸展操作以前,我们首先要知道旋转. 旋转的定义是在保证\(\mathrm{BST}\)性质的前提下,通过重新组合父子关系的方式交换一个节点\(p\)和\(\mathrm{fa}_p\)的位置.
旋转又分为左旋和右旋,其示意图如下:
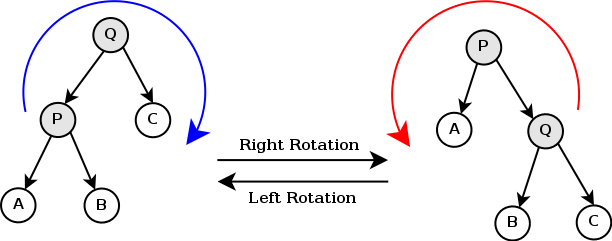
显然左右两颗树的中序遍历是一样的,所以\(\mathrm{BST}\)的性质不改变,但是\(\mathrm{P,Q}\)两个点的父子关系改变了,同时树的形态也改变了.
双旋
然而,上述一般的旋转无法保证\(\mathrm{Splay}\)操作的时间复杂度,我们还要引入双旋操作. 双旋是基于上述旋转操作的,具体来说,双旋分为两种:
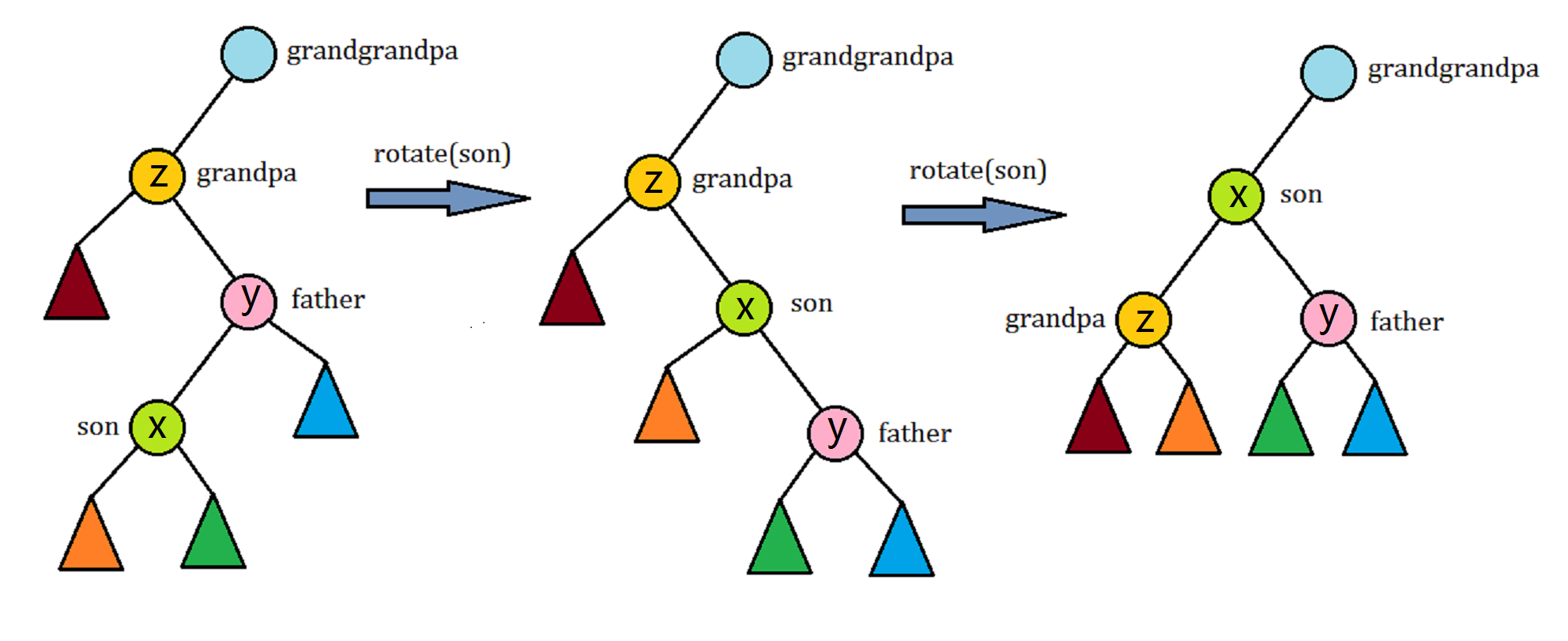
\(1.\) 当节点\(p\)的两代祖先都与其位于同一条链上时,先旋转\(\mathrm{fa}_p\),再旋转\(p\).
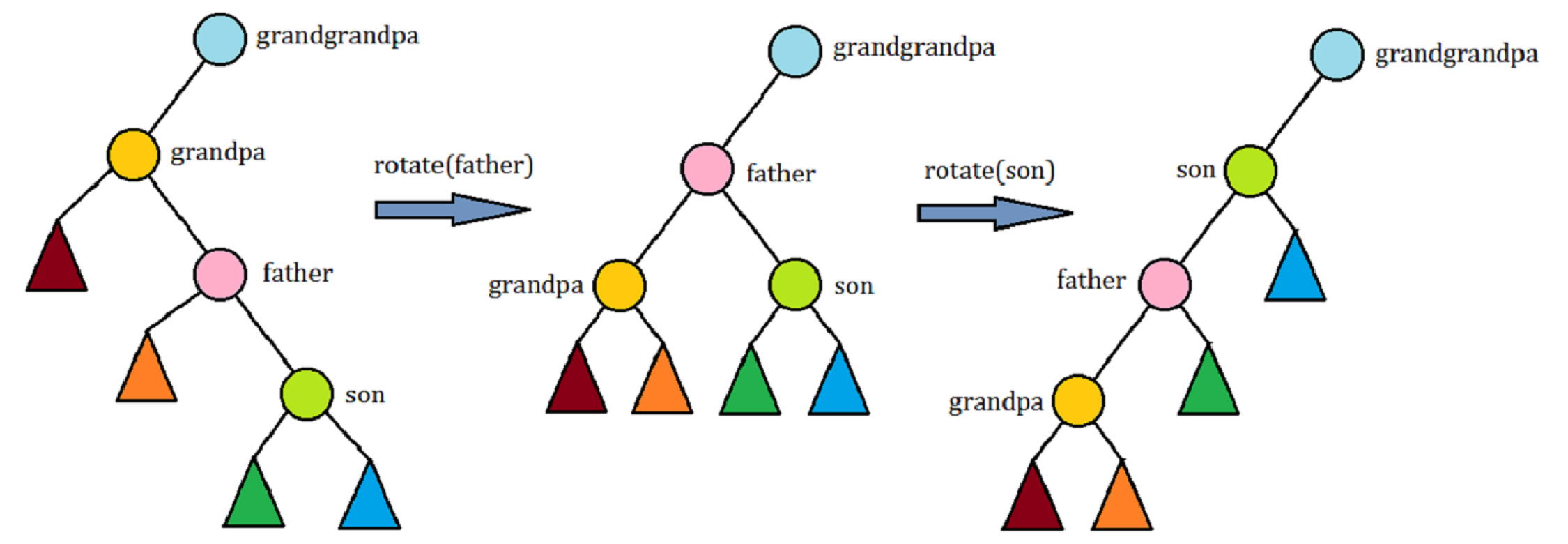
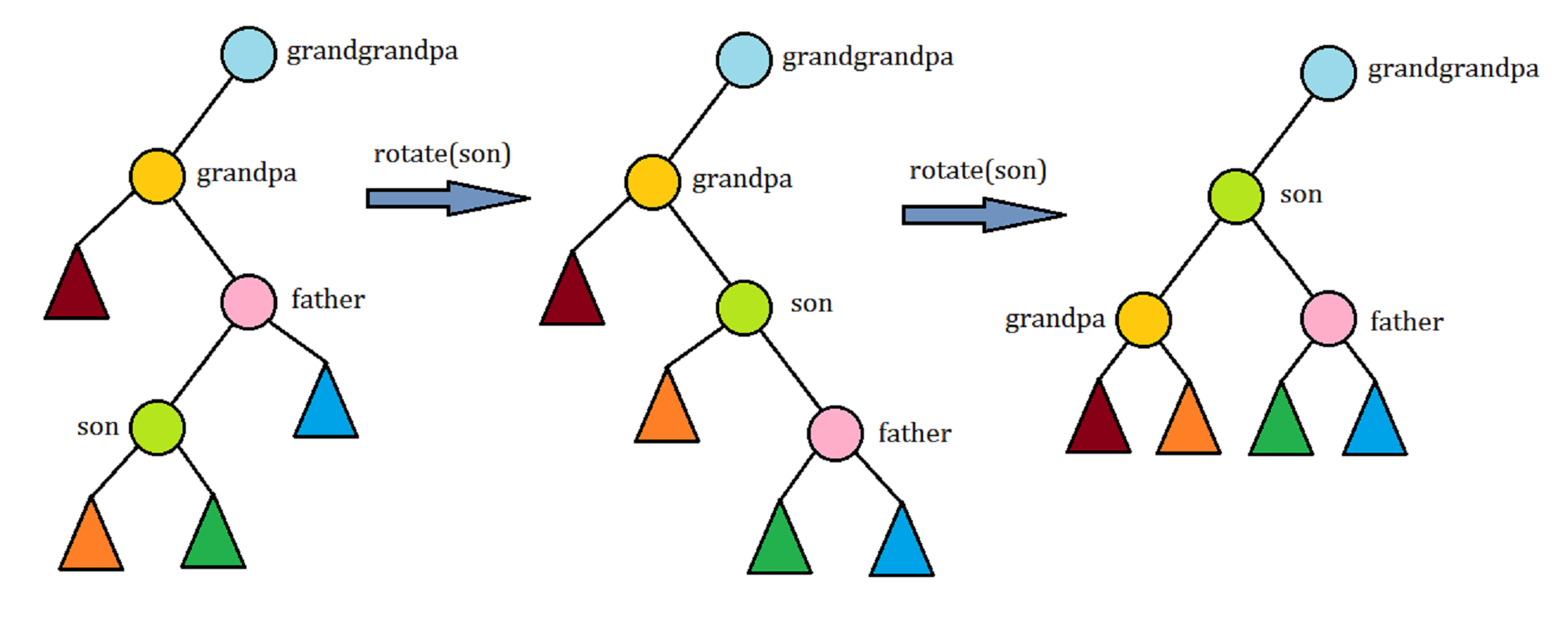
\(2.\) 当节点\(p\)的两代祖先不与其位于同一条链上时,直接两次旋转\(p\)即可.
旋转的目的是让节点\(p\)的深度变浅,而采用双旋的方式是为了保证时间复杂度,在下一节会详细讲.
Splay
\(\mathrm{Splay}\)的核心操作是每一次把一个节点旋转到根,也就是伸展操作.
在双旋的基础上,伸展操作的实现很简单,当\(x\)是根节点的儿子时,直接单旋,否则分两组情况不断双旋即可.
时间复杂度
势能分析法
在分析\(\mathrm{Splay}\)的时间复杂度前,我们首先要知道势能分析法的原理.
首先,我们可以假设总共有\(m\)次操作,每次操作的实际消耗时间\(t_i\)难以估计,那么我们可以引入一个势能\(\Phi_i\)表示第\(i\)次操作完后的某个特征值,然后用\(a_i=t_i+\Delta\Phi=t_i+\Phi_i-\Phi_{i-1}\)表示第\(i\)次操作的均摊时间,那么有:
那么就可以通过分析\(\sum_{i=1}^m a_i+\Phi_0-\Phi_m\)的大小来分析\(m\)次操作的总时间.
时间复杂度证明
我们不妨令每个点势能函数\(\phi(x)=\log s(x)\),整个\(\mathrm{Splay}\)的势能\(\Phi=\sum\phi(x)\). 根据均摊时间的定义,有\(a_i=t_i+\Delta\Phi\).
可以证明,均摊时间\(a_i\)满足\(a_i\leq 3(\phi'(x)-\phi(x))+1\),其中\(x\)表示所操作的点的编号,\(\phi'\)表示这次操作完之后的势能函数.
那么总时间\(\sum_{i=1}^m t_i=\sum_{i=1}^m a_i+\Phi_0-\Phi_m\),因为\(a_i\leq 3(\phi'(x)-\phi(x))+1\leq \log\frac{n}{s(x)}\leq \log n\),\(\forall i\in[1,m]\),\(\Phi\in[0,n\log n]\),所以总时间不超过\(\mathcal{O}((n+m)\log n)\).
也就是说,我们的主要思路就是证明均摊复杂度\(a_i\)是\(\mathcal{O}(\log n)\)级别的,那么剩下的时间复杂度只要根据势能法的定义计算一下就好了.
均摊复杂度证明
现在我们要证明\(a_i\leq 3(\phi'(x)-\phi(x))+1\),分三种情况讨论:
\(1.\) 节点\(x\)是根的直接儿子,单旋一次的均摊复杂度(图中的\(p\)就是此处的\(x\)).
如图,\(a_i=1+\phi'(p)+\phi'(q)-\phi(p)-\phi(q)=1+\phi'(q)-\phi(p)\leq\phi'(p)-\phi(p)+1\),原不等式成立.
\(2.\) 当节点\(x\)的两代祖先都与其位于同一条链上时,第一类双旋一次的均摊复杂度.
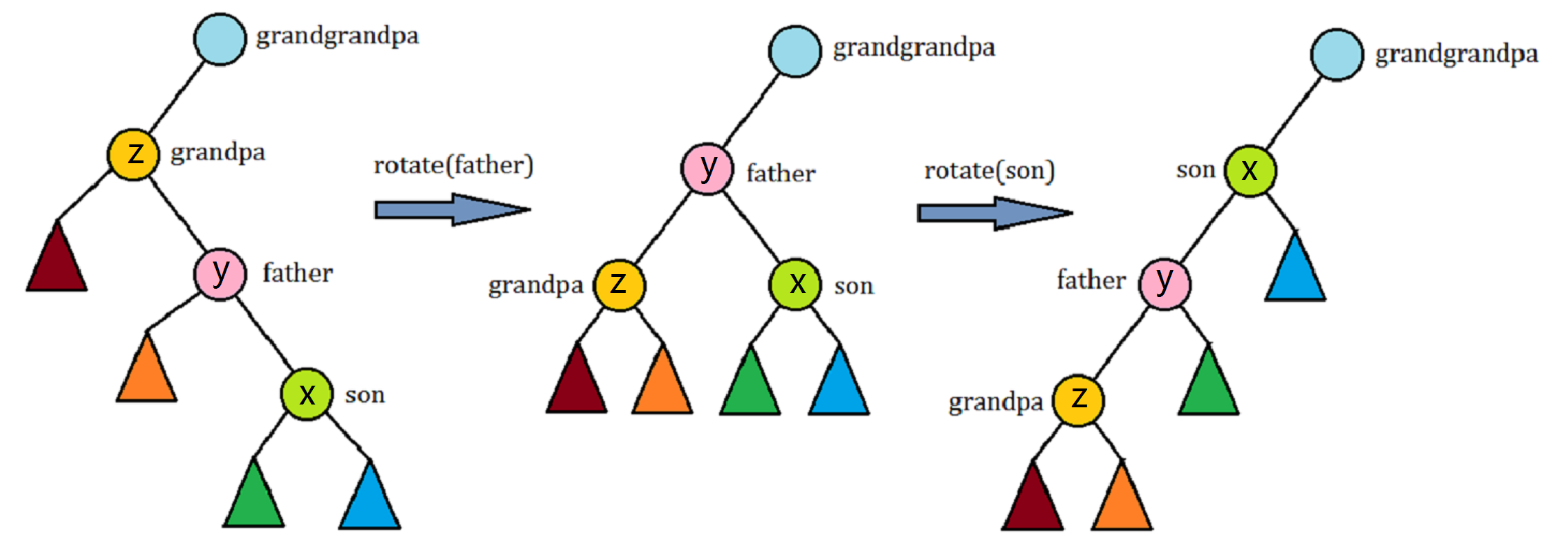
如图,有\(a_i=2+\phi'(x)+\phi'(y)+\phi'(x)-\phi(x)-\phi(y)-\phi(z)\),由于\(\phi(z)=\phi'(x)\),所以\(a_i=2+\phi'(y)+\phi'(z)-\phi(y)-\phi(x)\),由于\(s(y)>s(x)\),\(s'(x)>s'(y)\),所以原式可以写作:
由于双旋操作可能有很多次,所以我们要设法将\(2+\phi'(x)+\phi'(z)-2\phi(x)\)转化为关于\(\phi'(x)-\phi(x)\)的形式,并且要把常数\(2\)给隐藏掉,否则时间复杂度难以分析.
不妨考虑式子\(\phi(x)+\phi'(z)-2\phi'(x)\),由于\(s(x)+s'(z)<s'(x)\),结合对数函数的性质:
综上,就有:
两式相加得到:\(a_i<3(\phi'(x)-\phi(x))+2+\log\frac{1}{2}\).
值得注意的是,双旋操作有很多次,现在我们每次双旋的均摊时间肯定不能保留常数项,那么就要令\(2=\log 2\),也就是说\(\log\)是以\(\sqrt 2\)为底的,这样常数项抵消,即使差分逐次累加,原不等式也成立了.
这里我们直接把一次旋转的时间看做\(1\),但事实上可能还有一些常数,所以真正时间复杂度中\(\log\)的底数可能还要更小,这大概就是\(\mathrm{Splay}\)常数大的原因:我们不能简单的把\(\log\)看做\(\log_2\).
\(3.\) 当节点\(x\)的两代祖先不与其位于同一条链上时,第二类双旋一次的均摊复杂度.
第一步是一样的,因为\(\phi(z)=\phi'(x),\phi(y)>\phi(x)\),显然可以放缩为\(a_i<2+\phi'(z)+\phi'(y)-2\phi(x)\).
为了使其变成关于\(\phi(x)\)的差分,对应的式子就是\(\phi'(z)+\phi'(y)-2\phi'(x)\),现在我们根据\(s'(x)>s'(y)+s'(z)\),就有\(\phi'(z)+\phi'(y)-2\phi'(x)<\log\frac{1}{2}\),也就是\(\log\frac{1}{2}-(\phi'(z)+\phi'(y)-2\phi'(x))>0\),把两式相加就可以得到结论:
显然,即使有多次双旋,差分会相互抵消,原不等式也成立.
\(\mathrm{Conclusion}:\) 通过对三种旋转的讨论,得出\(\mathrm{Splay}\)操作的均摊时间是\(\mathcal{O}(\log n)\)级别的. 因为\(\mathrm{BST}\)上的暴力操作时间复杂度与\(\mathrm{Splay}\)操作的时间复杂度消耗同阶,所以\(n\)个点,\(m\)次操作的\(\mathrm{Splay}\)的总时间消耗不超过\(\mathcal{O}((n+m)\log n)\).
优势分析
首先\(\mathrm{Splay}\)是常见的真平衡树的一种(还有另外两种是\(\mathrm{Split\ Merge\ Treap}\)和\(\mathrm{Weight\ Balanced\ Leafy\ Tree}\)),是可以提取区间的,也就是说,区间翻转之类的操作都可以实现.
其次,\(\mathrm{Splay}\)是\(\mathrm{Dynamic\ Finger\ Search\ Tree}\),把\(n\)个点用\(\mathrm{Splay}\)启发式合并(拆解后从小到大加入到另一棵\(\mathrm{Splay}\))的时间复杂度是\(\mathcal{O}(n\log n)\)的.
并且,\(\mathrm{Splay}\)通常用于实现\(\mathrm{Link-Cut\ Tree}\),由于其时间复杂度的势能分析仍成立,所以时间复杂度是\(\mathrm{O}((n+m)\log n)\).
缺点:时间复杂度比较劣(\(\log\)不是以\(2\)为底,可能比较大),代码实现较长. 所以\(\mathrm{Splay}\)一般在实现\(\mathrm{LCT}\)时迫不得已才用,这里就不详细讲代码实现了,总结\(\mathrm{LCT}\)时会有代码.
Split Merge Treap
定义
非旋转\(\mathrm{Treap}\),又称\(\mathrm{fhq-Treap}\),利用分裂和合并来维护经典的随机平衡树\(\mathrm{Treap}\).
\(\mathrm{Treap}\)的原理很简单,对于树上的每一个点\(p\),我们都给它一个额外的随机权值\(\mathrm{ext}(p)\),并保证\(\mathrm{Treap}\)是一棵关键字为\((\mathrm{val}(p),\mathrm{ext}(p))\)的笛卡尔树,那么这样的\(\mathrm{BST}\)的期望树高就是\(\mathcal{O}(\log_2 n)\)的,从而保证所有操作的单次时间复杂度都是期望\(\mathcal{O}(\log_2 n)\)的.
具体来说,\(\mathrm{Treap}\)的结构其实相当于一个最终大小关系确定的序列(即中序遍历确定),那么每一次随便找一个点为根,左右两边递归就相当于随机取点的快速排序,期望复杂度就是\(\mathrm{O}(n\log_2n)\).
实现\(\mathrm{Treap}\)的关键在于如何维护笛卡尔树的形态,一种方法是旋转,但是具有较大的局限性,更好的方法是分裂和合并. 事实上,\(\mathrm{SMT}\)的代码实现是最简单的,实用性很强,接下来终点讲实现.
实现
Split
\(\mathrm{Split}\)操作指的是将一棵\(\mathrm{BST}\)分为两棵,可以按照权值分,也可以按照大小分. 按照权值分指的是将树\(\mathrm{T}\)分为\(\mathrm{T_1,T_2}\)两棵树,其中\(\mathrm{T_1}\)包括了\(\mathrm{T}\)中所有权值小于等于\(v\)的点,\(\mathrm{T_2}\)包括了剩下的点. 按大小分也是同理,\(\mathrm{T_1}\)包括了\(\mathrm{T}\)中权值最小的\(k\)个点,\(\mathrm{T_2}\)包括了剩下的点.
代码实现很简单,只要直接递归分裂即可.
inline void Splitv(int p,int v,int &a,int &b) {
if ( !p ) return a = b = 0 , void(); return val(p) <= v ?
( a = p , Splitv(rs(p),v,rs(p),b) , Update(p) ) : ( b = p , Splitv(ls(p),v,a,ls(p)) , Update(p) );
}
inline void Splitk(int p,int k,int &a,int &b) {
if ( !p ) return a = b = 0 , void(); int rk = k - cnt(ls(p)) - 1 , lk = k; return cnt(ls(p)) < k ?
( a = p , Splitk(rs(p),rk,rs(p),b) , Update(p) ) : ( b = p , Splitk(ls(p),lk,a,ls(p)) , Update(p) );
}
Merge
\(\mathrm{Merge}\)就是\(\mathrm{Split}\)的逆过程,可以合并两棵树,但是必须要求第一棵树的最大权小于第二棵树的最小权,也就是必须要有绝对的大小关系,不然是不能直接递归合并的,要启发式合并.
当然,在\(\mathrm{Merge}\)的时候显然我们要关注那个节点作为父节点的问题,这个就由\(\mathrm{Treap}\)的随机性能决定,也就是说我们要顺带维护\(\mathrm{Treap}\)的堆性质,这样的话就可以递归了.
inline int Merge(int a,int b) {
if ( !a || !b ) return a | b; return ext(a) < ext(b) ?
( rs(a) = Merge(rs(a),b) , Update(a) , a ) : ( ls(b) = Merge(a,ls(b)) , Update(b) , b );
}
Insert
假如我们要插入数字\(v\),只要把原树分为两半,一边小于等于\(v\),一边大于\(v\),把新点看做一棵大小为\(1\)的树,然后\(\mathrm{Merge}\)两次即可.
inline void Insert(int v) { Splitv(rt,v,x,y) , rt = Merge( Merge(x,Creat(v)) , y ); }
Remove
道理和\(\mathrm{Insert}\)差不多,先把树分成三部分,小于\(v\)的,等于\(v\)的和大于\(v\)的树,那么只要把等于\(v\)的那棵树中的根节点删掉就好了,方法是合并左右儿子.
inline void Remove(int v) { Splitv(rt,v,x,z) , Splitv(x,v-1,x,y) , y = Merge(ls(y),rs(y)) , rt = Merge(x,Merge(y,z)); }
Select
将前\(k\)小的数字放在一起,然后从根节点一直往右走找到最大的那个数值即可.
inline int Select(int k) { Splitk(rt,k,x,y); for (z=x;rs(z);z=rs(z)); return rt = Merge(x,y) , val(z); }
Rank
把权值小于等于\(v-1\)的数字放在树\(\mathrm{T'}\)里,只要返回\(\mathrm{|T'|+1}\)即可.
inline int Rank(int v) { Splitv(rt,v-1,x,y) , z = cnt(x) + 1; return rt = Merge(x,y) , z; }
Range
假如把\(\mathrm{Treap}\)建成区间树的话就可以提取区间,只需要把树分成\([1,l-1],[l,r],[r+1,n]\)三部分,对中间那棵子树做想做的操作就好了.
inline void Range(int l,int r) { Splitk(rt,r,x,z) , Splitk(x,l-1,x,y) , Apply(y) , rt = Merge(Merge(x,y),z); }
优势分析
\(\mathrm{Split\ Merge\ Treap}\)应该是性价比最高的平衡树,主要优势在于容易实现,代码简单,并且可以作为区间树使用.
由于其维护\(\mathrm{BST}\)的原理是分裂合并,所以还可以支持可持久化.
相比较于\(\mathrm{Splay}\)而言的话,缺点就是实现启发式合并和\(\mathrm{LCT}\)都只能\(O(n\log^2n)\),常数不算太好,但是比\(\mathrm{Splay}\)还是要快一些,应付一般的平衡树题没有什么问题.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号