Chapter 7 边值问题的有限差分法
 【微分方程数值解】:Chapter 7 1.25 ~ 3.7
【微分方程数值解】:Chapter 7 1.25 ~ 3.7
Laplace 方程:\(\Delta u(\mathbf{x}) = 0, \Delta:= \sum\limits_{i = 1}^n \dfrac{\partial^2}{\partial x_i^2}\)。
\(\Delta = \nabla \cdot \nabla\)(拉普拉斯算子:梯度的散度)
Poisson 方程:\(-\Delta u(\mathbf{x}) = f(\mathbf{x})\)。
一维区间 \(\Omega = (a, b)\) 的边值类型:
- Dirichlet 条件:\(u(a) = \alpha, u(b) = \beta\);
- 混合条件:\(u(a) = \alpha,\dfrac{\partial u}{\partial x} \bigg|_b = \beta\);
- Neumann 条件:\(\dfrac{\partial u}{\partial x}\bigg|_a = \alpha, \dfrac{\partial u}{\partial x}\bigg|_b = \beta\)。
【定理 7.7】
假设 \(f\) 和 \(g\) 是充分光滑的函数,则方程:
\[\Delta \phi = f \quad \text{in} \ \ \Omega \\ \mathbf{n}\cdot \nabla \phi = g \quad \text{on} \ \ \partial \Omega \]在满足额外条件(“高斯定理”):
\[\int_{\Omega} f \mathrm{d} V = \int_{\partial \Omega} g\mathrm{d} A. \]时,有唯一解(在相差一个常数的意义下)。
【例 7.8】
考虑把向量场分解成无旋、无散两个部分:
因为无散场 \(\mathbf{v}\) 满足条件 \(\oint_{\partial \Omega} \mathbf{v}\cdot\mathbf{n} = 0\) ,所以可以通过求解如下 Poisson 方程 + Neumann 边值条件来求解:
下面考察这个问题解的存在唯一性(根据【定理 7.7】):
7.1 有限差分格式
「线性边值问题」有限差分法的步骤如下:
- 把问题区域离散化成网格;
- 用不同格点的函数值来近似偏导值,根据问题的约束列出线形方程组 \(A\mathbf{U} = \mathbf{F}\)。
- 求解线性方程组,根据格点函数值来近似原函数。
【例 7.10】一维 Poisson 方程 + Dirichlet 边值条件
- 建立网格:\(x_j = jh, \quad h = \frac1{m+1}, \quad j = 0, 1, \ldots, m+1.\)
设 \(U_0 = \alpha, U_{m+1} = \beta\),方程的未知数为 \(U_1, \cdot, U_{m}\) (作为 \(u(x_j)\) 的近似)。 - 二阶导近似:
- 根据 \(-\dfrac{U_{j-1} - 2U_j + U_{j+1}}{h^2} = f(x_j), j = 1, \cdots, m\),得到方程 \(A\mathbf{U} = \mathbf{F}\)。
7.2 误差和一致性
有限差分法的误差(global error) 是 \(\mathbf{E} = \mathbf{U} - \hat{\mathbf{U}}\)。其中 \(\mathbf{U}\) 为求解方程得到的解向量,\(\hat{\mathbf{U}}\) 是格点处的原函数值。
网格函数(grid function):\(\mathbf{g}:\mathbf{X}\to \mathbb{R}\),其中 \(\mathbf{X}\) 是离散网格。
q-范数
一维网格 \(\mathbf{X}:= {x_1, \cdots, x_N}\)。\(\mathbf{g}\) 定义在 \(\mathbf{X}\) 上。
\[\| \mathbf{g}\|_q = \left(h\sum_{i = 1}^N |g_i|^q\right)^{\frac1q} \]
- \(1-\)范数:\(\|g\|_1 = h\sum_{i = 1}^N|g_i|\);
- \(\infty-\)范数:\(\| g\|_{\infty} = \max\limits_{1\le i\le N}|g_i|\)。
局部截断误差(LTE):导数值用有限差分替代所导致的误差(是一个理论值)。
比如:\(D^2u(x_j) := \dfrac{u(x_{j-1} - 2u(x_j) + u(x_{j+1}))}{h^2}\) 的 LTE 为 \(\tau_j = -D^2u(x_j) - (-u'' (x_j)) = -\dfrac{h^2}{12}u''''(x_j) + O(h^4) = O(h^2).\)
【引理 7.17】
对于 \((0, 1)\) 上一维线性边值问题 \(\mathcal{L}u = f(x)\),若使用有限差分方法得到 \(A\mathbf{U} = \mathbf{F}\),则该方法的 LTE 为 \(\tau = A\hat{\mathbf{U}} - \mathbf{F}\)。其中 \(\mathbf{F} = (f(x_1), \cdots, f(x_m))\)。
【证明】以 【例 7.10】为例:
\[(A\mathbf{\hat{U}} - \mathbf{F})_j = - \dfrac{u(x_{j-1}) - 2u(x_j) + u(x_{j+1})}{h^2} + \Delta u(x_j). \]
【引理 7.18】LTE 和 全局误差的关系为 \(A\mathbf{E} = - \tau\)。
【证明】\(A\mathbf{E} = A(\mathbf{U} -\mathbf{\hat{U}}) = \mathbf{F} - (\mathbf{F} + \tau) = -\tau\)。
一致性:称有限差分法关于边值问题一致若:
其中 \(\tau^h\) 是 LTE(这里 \(h\) 是上标)。
7.3 稳定性和收敛性
收敛性:有限差分法收敛若 \(\lim\limits_{h\to 0}\|\mathbf{E}^h\| = 0\),其中 \(\mathbf{E}^h\) 是全局误差,\(\|\cdot\|\) 是一种 \(q-\) 范数。
稳定性: 有限差分法稳定,若
- \(\exists h_0 \in \mathbb{R^+}\),满足 \(\forall h \in (0, h_0), \mathrm{det}(A) \neq 0\);
- \(\lim\limits_{h\to0}\|A^{-1}\| = O(1)\)。
【定理 7.22】
一致且稳定的有限差分法是收敛的。
【证明】
\[\lim \| \mathbf{E}^h\| \le \lim \| (A^h)^{-1}\| \lim \| \tau^h \| \le C \lim \| \tau^h\| = 0, \]这里向量范数与之前定义的 \(q-\)范数之间的关系是: \(\| \mathbf{E} \|_q = h^{\frac1q}\| \mathbf{E}\|\)。
7.3.1 2-范数下收敛
矩阵范数的定义为 \(\| A\| = \sup \left\{\dfrac{\| A\mathbf{x}\|}{\|\mathbf{x}\|}:\mathbf{x}\in \mathbb{R}^n, \mathbf{x}\neq 0\right\} = \sup\left\{\| A\mathbf{x}\|: \|x\| = 1\right\}.\)
常见的矩阵范数如下:
【引理 7.25】
【例 7.10】 中
\[A = \dfrac1{h^2}\begin{bmatrix} 2 & -1 & & & & \\ -1 & 2 & -1 & & & \\ & -1 & 2 & -1 & & \\ & & \ddots & \ddots & \ddots & \\ & & & -1 & 2 & -1\\ & & & & -1 & 2 \end{bmatrix}. \]\[\lambda_k(A) = \dfrac{4}{h^2}\sin^{2}\dfrac{k\pi}{2(m+1)} \\ w_{k,j} = \sin \dfrac{jk\pi}{m+1} \\ j,k = 1, 2, \cdots, m \]【证明】直接代入计算
【定理 7.27】
【例 7.10】中的有限差分法 2 阶收敛。
【证明】
根据 \(A\) 的对称性
\[\| A\|_2 = \sqrt{\rho(A^2)} = \rho(A) \le \frac{4}{h^2} \]由 【引理 7.25】\(A\) 非奇异。
并且
\[\lim_{h\to 0}\| A^{-1}\|_2 = \lim_{h\to 0} \dfrac{1}{\min |\lambda_k(A)|}=\lim_{h\to0} \dfrac{h^2}{4\sin^2 \frac{\pi h}{2}} = \dfrac{1}{\pi^2} \]所以 FD 方法稳定。
因为 LTE 满足
\[\lim_{h\to 0} |\tau_j| = \left|- \frac{h^2}{12}u''''(x_j) + O(h^4)\right| = 0 \\ \Rightarrow \lim_{h\to 0} \| \tau^h \| = 0 \]所以 FD 方法一致。
根据 【定理 7.22】,FD 方法 2 阶收敛。
7.3.2 Green 函数
【定义7.28】对任意给定的 \(\overline{x} \in [0, 1]\),Green 函数 \(G(x;\overline{x})\) 为 BVP \(\begin{cases} u''(x) = \delta (x - \overline{x}) \\ u(0) = u(1) = 0\end{cases}\) 的解。

【引理7.29】根据边值条件和脉冲函数的积分值可以得到,Green 函数的表达式为
证明:
取极限 \(\epsilon \to 0\), 由微积分基本定理得
设 \(G(x, \overline{x}) = \begin{cases} ax + b , \quad x \in [0, \overline{x}] \\ cx + d , \quad x \in [\overline{x}, 1]\end{cases}\),根据 $ c = a+1, b = 0, c+d = 0, a\overline{x} + b = c\overline{x} + d$ 得 \(a = \overline{x} - 1, b = 0, c = \overline{x}, d = \overline{x}\)。
【推论7.30】方程 \(\begin{cases} u''(x) = c\delta (x - \overline{x}) \\ u(0) = u(1) = 0\end{cases}\) 的解为 \(cG(x; \overline{x})\)。
7.3.3 ∞范数下收敛
【引理 7.31】
对于矩阵 \(A\):
\[A = \dfrac1{h^2}\begin{bmatrix} 2 & -1 & & & & \\ -1 & 2 & -1 & & & \\ & -1 & 2 & -1 & & \\ & & \ddots & \ddots & \ddots & \\ & & & -1 & 2 & -1\\ & & & & -1 & 2 \end{bmatrix}. \]其逆矩阵 \(B = A^{-1}\) 为:
\[b_{ij} = -h G(x_i; x_j)= \begin{cases} -h(x_j - 1)x_i, \quad i \le j, \\ -hx_j(x_i - 1), \quad i \ge j. \end{cases} \]即:
\[B = -h\begin{bmatrix} x_1(x_1 - 1) & x_1(x_2 - 1) & \cdots & x_1(x_m - 1)\\ x_1(x_2 - 1) & x_2(x_2 - 1) & \cdots & x_2(x_m - 1) \\ \vdots& \vdots & \ddots & \vdots \\ x_1(x_m - 1) & x_2(x_m - 1) & \cdots & x_m(x_m - 1) \end{bmatrix} \]其中 \(x_j = \dfrac{j}{m+1}\)。
【证明】
\(A\) 的第 \(i\) 行(乘 \(h^2\))和 \(B\) 的第 \(j\) 列(乘 \(-1/h\))如下:
\[[0, \cdots, 0, -1, 2, -1, 0, \cdots, 0] \begin{bmatrix} x_1(x_j - 1) \\ \vdots \\ x_{j-1}(x_j-1) \\ x_j(x_j- 1) \\ x_j(x_{j+1}-1) \\ \vdots \\ x_j(x_m-1) \\ \end{bmatrix} \\ = \begin{cases} 2x_j(x_j - 1) - x_{j-1}(x_j - 1) - x_j(x_{j+1}-1) = -h & i = j \\ (x_j - 1)(2x_i - x_{i - 1} - x_{i + 1})= 0 & i < j \\ x_j[2(x_i - 1) - (x_{i-1} - 1) - (x_{i+1} - 1)] & i > j \end{cases} \]
【定理 7.32】
接 【引理 7.31】,\(B = A^{-1}\) 满足
\[\| B \|_{\infty} = \max_{1\le i \le m}\sum_{j = 1}^m |b_{ij}| \le 1. \]【证明】
\[\begin{aligned} \sum_{j = 1}^m |b_{ij}| &= \sum_{j = 1}^i hx_j|x_i - 1| + \sum_{j = i + 1}^m hx_i|x_j - 1| \\ &\le \sum_{j = 1}^i h\left(\dfrac{m}{m + 1}\right)^2 + \sum_{j = i + 1}^m h\left(\dfrac{m}{m + 1}\right)^2 \quad [x_j \le \dfrac{m}{m+1}, |x_i - 1|\le 1]\\ &= mh\left(\frac{m}{m+1}\right)^2 = \left(\frac{m}{m+1}\right)^3 \le 1. \end{aligned} \]
7.4 A solution via Green’s function
【引理7.33】设 \(\mathcal{L}\) 是可逆的线性算子,满足 \(\mathcal{L}u(x) = f(x)\),则有 \(u(x) = \int G(x; \overline{x}) f(\overline{x})\mathrm{d}\overline{x}\),其中 \(G\) 满足 \(\mathcal{L}G(x;\overline{x}) = \delta(x - \overline{x})\)。
证明:因为 \(\mathcal{L}G(x; \overline{x}) = \delta(x - \overline{x})\),所以 \(\int \mathcal{L}G(x; \overline{x})f(\overline{x}) \mathrm{d}\overline{x} = \int \delta(x - \overline{x})f(\overline{x}) \mathrm{d}\overline{x} = f(x)\)。
根据线性性,\(\mathcal{L} \int G(x; \overline{x}) f(\overline{x}) \mathrm{d} \overline{x} = f(x)\),由可逆性得到结论。
【定理7.34】Drichlet BVP \(\begin{cases} u''(x) = f(x) \\ u(0) = \alpha, u(1) = \beta\end{cases}\) 的解为 \(u(x) = \alpha G_0(x) + \beta G_1(x) + \hat{u}(x)\)。其中,
【引理7.35】对于 \(\begin{cases} u''(x) = f(x) \\ u(0) = \alpha, u(1) = \beta\end{cases}\) 这样的边值问题,一个右端项 \(f\) 的 \(O(\epsilon)\) 扰动带来 \(O(\epsilon h)\) 的误差,对于 Dirichlet 条件的 \(O(\epsilon)\) 的扰动,带来 \(O(\epsilon)\) 的误差。
证明:
离散化后得到 \(A_g \mathbf{U}_g = \mathbf{F}_g\),其中,
\[A_g = \frac{1}{h^2} \begin{bmatrix} h^2 & 0 & & & & & \\ 1 & -2 & 1 & & & & \\ & 1 & -2 & 1 & & &\\ & & \ddots & \ddots & \ddots& & \\ & & & 1 & -2 & 1 & \\ & & & & 1 & -2 & 1 \\ & & & & & 0 & h^2 \end{bmatrix},\\ \mathbf{U}_g = \begin{bmatrix} U_0 \\ \mathbf{U} \\ U_{m+1} \end{bmatrix},\quad \mathbf{F} = \begin{bmatrix} f(x_1) \\ f(x_2) \\ \vdots \\ f(x_{m-1}) \\ f(x_m) \end{bmatrix},\quad \mathbf{F}_g = \begin{bmatrix} \alpha \\ \mathbf{F} \\ \beta \end{bmatrix} \]令 \(B = A^{-1}, B_g = A_g^{-1} = \begin{bmatrix} & \mathbf{0}^T & \\ \mathbf{b}_{g,0} & B & \mathbf{b}_{g, m+1} \\ & \mathbf{0}^T & \end{bmatrix}\),则有
\[\mathbf{U}_g = \begin{bmatrix} & \mathbf{0}^T & \\ \mathbf{b}_{g, 0} & B & \mathbf{b}_{g, m+1} \\ & \mathbf{0}^T & \end{bmatrix} \begin{bmatrix} \alpha \\ \mathbf{F} \\ \beta \end{bmatrix} = \alpha \mathbf{b}_{g, 0} + \beta \mathbf{b}_{g, m+1} + \begin{bmatrix} 0 \\ B \mathbf{F} \\ 0 \end{bmatrix} \]因为 \(\| B \| = O(h)\),所以可以得到结论1。可以证明 \(\mathbf{b}_{g,0}\) 和 \(\mathbf{b}_{g,m+1}\) 是常数级别的,由此得到结论2。
7.5 其他边值条件
【例 7.36】二阶边值问题+混合边值条件
此时 \(x = 0\) 处的函数值未知。
-
[方法一]
使用 \(\dfrac{U_1 - U_0}{h} = \sigma\)。
\(x_0 = 0\) 处的 LTE 仅有一阶精度:
-
[方法二]:编程使用
延拓一个点 \(x_{-1} = -h\),使用 \(\dfrac{U_1 - U_{-1}}{2h} = \sigma\),此时为二阶精度。
为了消掉 \(x_{-1}\),增加条件 \(\dfrac{1}{h^2}(U_{-1} - 2U_0 + U_1) = f(x_0)\),则得到 \(\dfrac{1}{h}(-U_0 + U_1) = \sigma + \dfrac{h}2f(x_0)\)。
-
[方法三]
使用 \(U_0, U_1, U_2\) 来估计 \(u'(0)\),\(-\dfrac1h(\dfrac32 U_0 - 2U_1 + \dfrac12U_2) = \sigma + O(h^2)\)。
得到新的矩阵:
【例 7.38】二阶边值问题+Neumann条件
为了保证解的存在性,需要满足:
处理方法类似 【例 7.36】。
根据方法一:
【引理 7.39】
【例 7.38】 中矩阵 \(A_F\) 满足 \(\dim \mathcal{N}(A_F) = 1\)。(\(\mathcal{N}\) 即 Kernel)。
【证明】
显然 \(\mathbf{e} = [1, 1, \cdots, 1]^T\) 属于 \(A_F\) 的零空间。
如果定下了 \(U_{m+1}\) 的值,则变为混合边界条件,其解唯一,所以零空间秩为1。
【定理 7.40】(可解性)
【例 7.38】 中方程有解,当且仅当
\[\frac{h}2 f(x_0) + h\sum_{i = 1}^m f(x_i) + \frac{h}2f(x_{m+1}) = \sigma_1 - \sigma_0 \]【证明】
根据代数基本定理
\(f:U\to V\),\(A\) 是 \(f\) 对应的矩阵。
\(V = \text{Im} A\oplus \text{Ker}A^T\)
\[\mathbb{R}^{m+2} = \mathcal{R}(A_F) \oplus \mathcal{N}(A_F^T) \]且 \(\dim \mathcal{N}(A_F^T) = \dim \mathcal{N}(A_F)\)(因为 \(A\) 是方阵)。
可以验证 \(\mathcal{N}(A_F^T) = \text{span}\{[1, h, \cdots, h,1]^T\}\)。
“\(\Leftarrow\)”:因为 \(\frac{h}2 f(x_0) + h\sum_{i = 1}^m f(x_i) + \frac{h}2f(x_{m+1}) = \sigma_1 - \sigma_0\),所以 \(\mathbf{F}_F\) 与 \(\mathcal{N}(A_F)\) 正交,所以 \(\mathbf{F}_F\in \mathcal{R}(A_F)\)。则说明方程有解。
"\(\Rightarrow\)":\(\mathbf{F}_F\in \mathcal{R}(A_F)\) 可以推出上式。
7.6 二维边值问题
【例 7.41-7.42】二维 BVP+Dirichlet条件
建立网格:
对于 \(f(x_i, y_j) = (-\dfrac{\partial^2}{\partial x^2} -\dfrac{\partial^2}{\partial y^2})u(x_i, y_j)\),作如下近似:
将 \(m\times m\) 个方程组成方程组 \(A_{2D}\mathbf{U} = \mathbf{F}\)。
LTE 的计算如下:
【引理 7.44】
【例 7.41-7.42】中全局误差 \(\mathbf{E} = \mathbf{U} - \hat{\mathbf{U}}\)。则 \(A_{2D}\mathbf{E} = -\mathbf{\tau}\)。
7.6.1 Kronecker product
【定义7.45】称 \(A \in \mathbb{C}^{m\times n}\) 和 \(B\in \mathbb{C}^{p\times q}\) 的 Kronecker 积为 \(A\otimes B \in \mathbb{C}^{mn \times pq}\):
【定义7.47】称 \(X \in \mathbb{C}^{m \times n}\) 的拉直为 \(\text{vec}(X) \in \mathbb{C}^{mn}\),为将 \(X\) 的各列从上到下从左到右排列的列向量。
【引理7.48】任意 \(A\in \mathbb{C}^{m\times m},B \in \mathbb{C}^{n \times n},X\in \mathbb{C}^{m\times n}\) 满足:
\[\begin{aligned} &\text{vec}(AX) = (I_n \otimes A)\text{vec}(X), \\ &\text{vec}(XB) = (B^T \otimes I_m) \text{vec}(X). \end{aligned} \]证明:
\[\begin{aligned} \text{vec}(AX) &= \text{vec}([A\mathbf{X}_1, A\mathbf{X}_2, \cdots, A\mathbf{X}_n]) = [A\mathbf{X}_1, A\mathbf{X}_2, \cdots, A\mathbf{X}_n]^T \\&= \begin{bmatrix}A & & & \\ & A & &\\ & & \ddots & \\ & & & A\end{bmatrix} [A\mathbf{X}_1, A\mathbf{X}_2, \cdots, A\mathbf{X}_n]^T \\ &= (I_n \otimes A)[A\mathbf{X}_1, A\mathbf{X}_2, \cdots, A\mathbf{X}_n]^T \end{aligned} \]令 \(Y = XB\),则 \(Y_j = X b_j \Rightarrow y_{kj} = \sum_{i = 1}^n x_{ki}b_{ij}\)。
令 \(C = B^T \otimes I_m\),则 \(C_{ij} = b_{ij} I_m\)。
令 \(D = C \text{vec}(X)\),则 \(\mathbf{D}_j = \sum_{i = 1}^n C_{ji} \mathbf{X}_i = \sum_{i = 1}^n b_{ij} I_m \mathbf{X}_i = \sum_{i = 1}^n b_{ij} \mathbf{X}_i\),\(d_{(k, j)} = \sum_{i = 1}^n b_{ij} x_{ki} = \sum_{i = 1}^n x_{ki} b_{ij}\)。
所以 \(\text{vex}(Y) = D\),即 \(\text{vec}(XB) = (B^T \otimes I_m) \text{vec}(X)\)。
7.6.2 Convergence in the 2-norm
【引理7.49】引入中的线性方程组 \(A_{2D}\mathbf{U} = \mathbf{F}\) 等价于 \(AU_{m\times m} + U_{m\times m}A = F_{m\times m}\)。其中 \(U_{m\times m}\) 的 \((i, j)\) 个元素,是格点 \((i,j)\) 的解,\((F_{m\times m})_{ij} = f(ih, jh)\)。\(A = \frac1{h^2}\begin{bmatrix}2 & -1 & & & & \\ -1 & 2& -1 & & & \\ & -1 & 2 & -1 & & \\ & & \ddots & \ddots & \ddots & \\ & & & -1 & 2 -1 \\ & & & & -1 & 2\end{bmatrix}\)。
证明:
【引理7.50】1D 问题中的 \(A\) 满足:\(\text{vec}(AU+UA) = (I_m \otimes A + A\times I_m)\text{vec}(U)\)。
证明: \(\text{vec}(AU) = (I_m \times A) \text{vec}(U), \text{vec}(UA)= (A^T\otimes I_m)\text{vec}(U) = (A\otimes I_m)\text{vec}(U)\)。
【定理7.51】\(A_{2D} = I_m \otimes A + A \otimes I_m, \mathbf{U} = \text{vec}(U_{m\times m}), \mathbf{F} = \text{vec}(F_{m\times m})\)。
【定义7.52】称 \(n\) 维空间的离散拉普拉斯算子为

例如:对于 \(n = 3\),\(A_{3D} = A\otimes I_m \otimes I_m + I_m \otimes A \otimes I_m + I_m \otimes I_m \otimes A\)。
【定理7.54】\(A_{2D}\) 的特征值为 \(\lambda_{ij} = \lambda_i + \lambda_j, \mathbf{W}_{ij} = \text{vec}(\mathbf{w}_i \mathbf{w}_j^T)\) ,\(i,j = 1, \cdots, m\),$$
证明:
\[\begin{aligned} A\mathbf{w}_i\mathbf{w}_j^T + \mathbf{w}_i\mathbf{w}_j^TA &= \lambda_i \mathbf{w}_i\mathbf{w}_j^T + \mathbf{w}_i \mathbf{w}_j^TA^T \\ &= \lambda_i \mathbf{w}_i \mathbf{w}_j^T + \mathbf{w}_i(A\mathbf{w}_j)^T \\ &= (\lambda_i + \lambda_j) \mathbf{w}_i \mathbf{w}_j^T \end{aligned} \]所以,
\[\begin{aligned} A_{2D}\text{vec}(\mathbf{w}_i\mathbf{w}_j^T) &= (I_m \otimes A + A\otimes I_m)\text{vec}(\mathbf{w}_i\mathbf{w}_j^T) \\ &= \text{vec}(A(\mathbf{w}_i\mathbf{w}_j^T) + (\mathbf{w}_i\mathbf{w}_j^T)A) \\ &= (\lambda_i + \lambda_j)\text{vec}(\mathbf{w}_i\mathbf{w}_j^T). \end{aligned} \]
【定理7.55】方程 \(-u_{xx} - u_{yy} = f(x, y)\) 的有限差分算法在 2-范数下是 2 阶收敛的。
证明:
因为 \(A_{2D}\) 是对称的,所以 \(\| A_{2D}\|_2 = \rho (A_{2D})\),根据【定理7.53】,所以
\[\lim_{h\to 0} \| A_{2D}^{-1}\|_2 = \lim_{h\to 0} \dfrac1{\min |\lambda_{ij}|} = \lim_{h\to 0} \dfrac{h^2}{8\sin^2 \dfrac{\pi h}{2}} = \dfrac1{2\pi^2} = O(1). \]所以算法是稳定的。根据【定理7.22】算法是二阶收敛的。
7.6.3 Convergence in the max-norm via a discrete maximum principle
【定理7.56】方程 \(-u_{xx}-u_{yy} = f(x, y)\) 的有限差分算法在 \(\infty\)-范数下是 2 阶收敛的。
证明:
令 \(\mathbf{X}_I\) 为 \(\mathbf{X}\) 的内点,即删去(\(i = 0, m+1\vee j = 0, m +1\) 的网格点后的网格)。
定义线性映射 \(\hat{A}_{2D} : \{\mathbf{X}\to \mathbb{R}\} \to \{\mathbf{X}_I \to \mathbb{R}\}\),
\[\begin{aligned} \hat{A}_{2D} U_{i,j} &:= (\hat{A}_{2D} \mathbf{U})_{i,j} \\ &= \dfrac1{h^2}(4U_{i,j} - U_{i+1,j} - U_{i-1,j} - U_{i,j+1} - U_{i,j-1}) \end{aligned} \]\(\hat{A}_{2D}\) 和 \(A_{2D}\) 的矩阵是不相同的,(维数不同,作用效果也不同)。
定义 \(\phi: \mathbb{R}^2 \to \mathbb{R}\), \(\phi(x, y) = (x-\frac12)^2 + (y-\frac12)^2, \phi_{i,j} = \phi(ih, jh)\)。
则 \(\hat{A}_{2D} \phi_{i,j} = -4\)。
令 \(E, \tau: \mathbf{X} \to \mathbb{R}\) 分别为总体误差和 LTE,记 \(\tau_m := \max_{i,j} |\tau_{i,j}|\),
定义网格函数 \(\psi:\mathbf{X} \to \mathbb{R}, \psi_{i,j} = E_{i,j} + \frac14 \tau_m \phi_{i,j}\),又因为 \(\hat{A}_{2D} E_{i,j} = -\tau_{i,j}\),
则 \(\hat{A}_{2D} \psi_{i,j} = -\tau_{i,j} - \tau_m \le 0\),这说明 \(\psi_{i,j}\) 一定比其四联通相邻的4个网格点之一小,因此 \(\psi\) 的最大值在边界处取得。\(\phi_{i,j}\) 的最大值是 \(\frac12\),\(E_{i,j}\) 在边界上是 \(0\),所以:
\[\exist C > 0, E_{i,j} \le \psi_{i,j} \le \frac18 \tau_m \le Ch^2 \]定义 \(\chi:\mathbf{X} \to \mathbb{R}, \chi_{i,j} = - E_{i,j} + \frac14 \tau_m \phi_{i,j}\),则类似地有 \(-E_{i,j} \le \chi_{i,j} \le \frac18\tau_m \le Ch^2\)。
注解:
定义 \(\mathbf{X}_{\Omega}\) 为 BVP 地离散点集合,即待求值的点的集合,\(\mathbf{X}_{\partial \Omega}\) 为 BVP 的边界离散点的集合,即已知值的点的集合(Dirichlet条件),以及 “ghost cell”(方便程序设计而加的 \(\Omega\) 外的点)。比如 \([0, 1]^2\) 的四个角。
【引理7.58】(离散最大值原理)
设 BVP 的 FD 离散化为 \(\forall P \in \mathbf{X}_{\Omega}, (L_h U)_P - f_P + g_P = 0\),\(f_P\) 是方程的右端项,\(g_P\) 是除 Dirichlet 外的边界条件(因为 Dirichlet 已包含在 \(L_h\) 中)。\(L_h, \mathbf{X}_{\Omega}\) 满足:
(DMP-1) \(\forall P \in \mathbf{X}_{\Omega}, L_hU_P = c_P U_P - \sum\limits_{Q\in Q_P} c_QU_Q\),其中 \(Q_P \subset \mathbf{X}_{\Omega} \cup \mathbf{X}_{\partial \Omega}, c_P > 0, c_Q > 0\),称 \(\{P\}\cup Q_P\) 为 \(L_h\) 上的 P-stencil (P-模版);
(DMP-2) \(\forall P \in \mathbf{X}_{\Omega}, c_P \ge \sum\limits_{Q\in Q_P} c_Q\);
(DMP-3) \(\mathbf{X}_{\Omega}\) 是联通的,即 \(\forall P_0, P_m \in \mathbf{X}_{\Omega}, \exists P_1, P_2, \dots, P_{m-1},\text{ s.t.}\forall r = 1,2,\dots, m, P_r\) 在 \(P_{r-1}\)-模版中。
(DMP-4) (DMP-1) 中至少有一个方程包含了由 Dirichlet 边界条件给出的 \(U_Q\)。
则对于任意网格函数 \(\psi: \mathbf{X} \to \mathbb{R}\),满足 \(\begin{cases} \max\limits_{P\in \mathbf{X}} \psi_P \ge 0 \\ \forall P \in \mathbf{X}_{\Omega}, \quad L_h\psi_P \le 0\end{cases}\);
则有 \(\max\limits_{P\in \mathbf{X}_{\Omega}} \psi _P \le \max\limits_{Q\in \mathbf{X}_{\partial\Omega}} \psi_{Q}\)。
证明:
设 \(M_{\Omega} = \max\limits_{Q\in \mathbf{X}_{\Omega}} \psi_Q > M_{\partial \Omega} = \max\limits_{Q\in \mathbf{\partial \Omega}} \psi_Q\),令 \(P\) 为 \(\psi\) 达到 \(M_{\Omega}\) 的点,则有
\[M_{\Omega} = \psi_P \le \dfrac1{c_P} \sum_{Q\in Q_P} c_Q \psi_Q \le \dfrac1{c_P} \sum_{Q\in Q_P} c_Q M_{\Omega} \le M_{\Omega} \]第二个 '=' 能取到当且仅当 \(\forall Q, \psi_Q = \psi_P\),由 (DMP-3) \(\psi\) 在任意离散点处都取到相同的值 \(M_{\Omega}\),矛盾!
【定理7.60】考虑 BVP 的满足 (DMP-1,2,3,4) 的 FD 格式,则其全局误差 \(E_P := U_P - u(P)\) 有界:
\[\forall P \in \mathbf{X}, \quad |E_P| \le T_{max} \left(\max_{Q\in \mathbf{X}_{\partial \Omega}} \phi(Q)\right) \]其中 \(T_{max} = \max\limits_{P\in \mathbf{X}_{\Omega}} |T_P|\),\(T_P\) 是 \(P\) 处的 LTE,\(\phi:\mathbf{X} \to \mathbb{R}\) 是一个非负函数满足 \(\forall P \in \mathbf{X}_{\Omega}, L_h \phi_P \le -1\)。
证明:
根据【引理7.58】\(L_hE_P = - T_P\)。定义 \(\psi_P := E_P + T_{max} \phi_P\),则 \(L_h \psi_P \le -T_P - T_{max} \le 0\)。进一步地,因为 \(\phi_P \ge 0\),所以 \(\max\limits_{P\in \mathbf{X}}\psi_P \ge 0\) 且 \(\forall Q \in \mathbf{X}_{\partial \Omega}, E_Q = 0\)。
\[\begin{aligned} E_P &\le \max_{P \in \mathbf{X}} (E_P + T_{max} \phi_P) \\ &\le \max_{Q \in \mathbf{X}_{\partial Q}}(E_Q + T_{max} \phi_Q) = T_{max} \max_{Q\in \mathbf{X}_{\partial \Omega}} (\phi_Q). \end{aligned} \]对 \(\psi_P = -E_P + T_{max} \phi_P\) 同样处理,得 \(-E_P\le T_{max} \max\limits_{Q\in \mathbf{\partial \Omega}}(\phi_Q)\)。
7.6.4 不规则区域上的收敛性
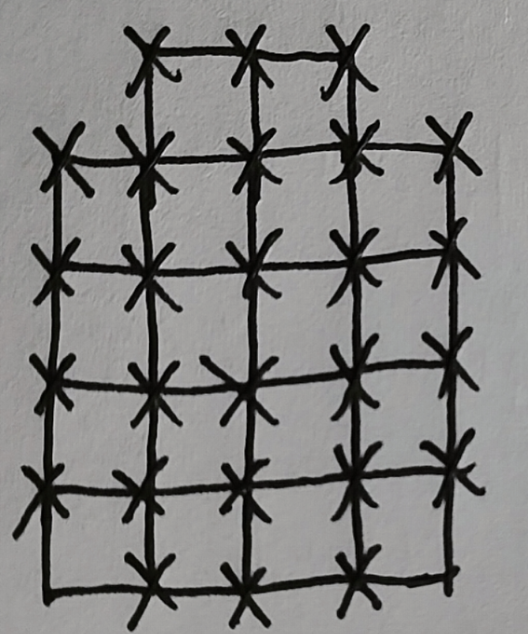
【例 7.61】不规则区域二维 BVP + Dirichlet 条件
网格点称作是 regular 的,当其可以使用 5 点差分法,否则是 irregular 的点。
比如对于下图中的 \(P\) 点,列出的方程为:
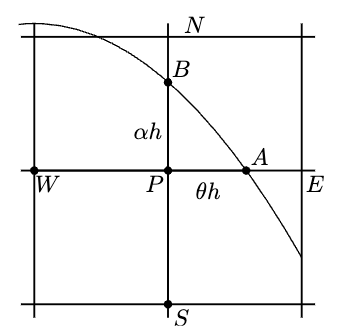
【练 7.62】在 例 7.61 中,非正则点处的 LTE 是 \(O(h)\),而正则点处的 LTE 是 \(O(h^2)\)。
【定理 7.63】在 定理 7.60 中,令 \(\mathbf{X}_{\Omega} = \mathbf{X}_1 \cup \mathbf{X}_2 ,\quad\mathbf{X}_1 \cap \mathbf{X}_2 = \emptyset\),若非负函数 \(\phi : \mathbf{X} \to \mathbb{R}\) 满足
\[\forall P \in \mathbf{X}_1, \quad L_h \phi_P \le -C_1 < 0; \\ \forall P \in \mathbf{X}_2, \quad L_h \phi_P \le -C_2 < 0, \]并且 LTE 满足
\[\forall P \in \mathbf{X}_1, \quad |T_P| < T_1; \\ \forall P \in \mathbf{X}_2, \quad |T_P| < T_2. \]则总误差 \(E_P := U_P - u(P)\) 满足
\[\forall P \in \mathbf{X}, |E_P| \le \left(\max_{Q\in \mathbf{X}_{\partial \Omega}} \phi(Q)\right) \max \left\{ \dfrac{T_1}{C_1}, \dfrac{T_2}{C_2} \right\}. \]
【定理7.65】 例 7.61 中的 FD 格式在∞范数下二阶收敛。
证明:
定义 \(\phi(x, y) = \begin{cases}F_1[(x-p)^2 + (y - q)^2] & (x, y) \in \mathbf{X}_{\Omega} \\ F_1[(x-p)^2 + (y-q)^2] + F_2 & (x, y) \in \mathbf{X}_{\partial \Omega}\end{cases}\),其中 \((p, q)\) 是 \(\Omega\) 的几何重心,\(F_1, F_2 > 0\) 待定,正则点和非正则点均属于 \(\mathbf{X}_{\Omega}\),不同点在于,对于正则点 \(Q\),\(L_h \phi_Q = -4 F_1\),对于非正则点 \(P\) ,\(-\frac2{\theta(1+\theta)h^2} < - \frac1{h^2} \Rightarrow L_h\phi_P < -4 F_1 - \frac1{h^2}F_2< \frac1{h^2}F_2\)。根据【练 7.62】,有 \(T_1 = K_1 h^2, T_2 = K_2 h\),所以 \(|E_P| \le (F_1 R^2 + F_2)\max\left\{\frac{K_1h^2}{4F_1}, \frac{K_2h^3}{F_2}\right\}\),\(R\) 是 \(\Omega\) 中点到重心的最长距离,取 \(\frac{F_1}{F_2} = \frac{K_1}{4K_2 h}\),有 \(\forall P \in \mathbf{X}, |E_P| \le \frac14 K_1 R^2 h^2 + K_2h^3\)。
考虑例 7.61图中的非正则点:
\[\begin{aligned} L_h\phi_P &= \dfrac{F_1[(1+\theta)(x_P - p)^2-\theta(x_P - h - p)^2 - (x_P + \theta h - p)^2] - F_2}{\frac12 \theta(1+\theta)h^2} \\ &+ \dfrac{F_1[(1+\alpha)(x_P - q)^2-\alpha(x_P - h -q)^2 - (x_P + \alpha h - q)^2] - F_2}{\frac12 \alpha(1+\alpha)h^2} \\ &= -8F_1 - F_2\left(\dfrac{2}{\theta(1+\theta)h^2} + \dfrac{2}{\alpha(1+\alpha)h^2}\right) \\ &< -8F_1 -\frac{2}{h^2}F_2 < -\frac2{h^2}F_2 \end{aligned} \]所以 \(|E_P| \le (F_1 R^2 + F_2)\max\left\{\frac{K_1h^2}{4F_1}, \frac{K_2h^3}{2F_2}\right\}\Rightarrow |E_P| \le \frac14 K_1R^2h^2 + \frac12 K_2 h^3.\)
事实上,只有一个方向的stencil不可达的非正则点的误差更大,不应该用例 7.61图中的非正则点来估计。
Programming 相关
二维 Poisson 方程:\(-\Delta u = f \text{ in }\ \Omega\)。
问题区域: \([x_l, x_r] \times [y_l, y_r]\),或者从中去掉一个圆盘:\(D:(x-c_x)^2 + (y - c_y)^2 = R^2\)。
- \(u(x, y) = \exp (y + \sin(x))\)
- \(u(x, y) = \sin x \sin y\)
- \(u(x, y) = \ln(1 + x^2 + y^2)\)
注意
-
纯 Neumann:有一个自由常数,可以强行左下角的点等于 \(1\);
-
Regular 情况:
-
Dirichlet:一共 \((N+1)^2 - 4\) 个点,对于内部 \((N-1)^2\) 个点列五点差分,对于边界 \(4(N-1)\) 个点直接求值;
-
Neumann:一共 \((N+3)^2-4\) 个点,对于已有 \((N+1)^2\) 个点列五点差分,对于延拓的 \(4(N+1)\) 个点列导数条件;

-
mixed:考虑四个角,如果两侧都是 Neumann,需要把角两边的点也延拓;如果两侧都是 Dirichlet,角不需要考虑;如果两侧条件不一样,则角需要考虑,但不用延拓角两边的点,可以直接取它根据 Dirichlet 边算出来的值,具体如下:
-
-
Irregular 情况:
[原方案——写出来2阶硬是跑成了1阶收敛]
限制:圆与外框不相交,不相切!圆内至少有4个格点。
-
边界条件如上。
-
内部格点均可以列五点差分。
-
圆与格线交点(可能直接就是格点),Dirichlet 直接求值,Neumann 要想满足收敛阶需要更多的点(6个)。
-
圆内部延拓出来的点,列一个割线近似的方程。
[最终采纳方案⬇️]
-
不过点不能像下面某些取2*3的点阵,得保证一定有横纵坐标都不相同的3个才行。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号