
PIE-Basic 微分锐化
1.基本概念
Roberts算子:
Roberts算子又称为交叉微分算法,采用交叉差分的方法表示梯度,是一种利用局部差分方法寻找边缘的算子,该算子采用对角线方向相邻两像元之差近似梯度幅值检测边缘。
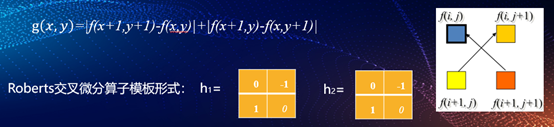
Roberts算子常用来处理具有陡峭的低噪声图像,当图像边缘接近于正45度或负45度时,该算法处理效果较好。其缺点是对边缘的定位不太准确,提取的边缘线条较粗。
Prewitt算子:
Prewitt算子是一种一阶微分算子,对邻域内采用平均法进行差分实现图像边缘检测。
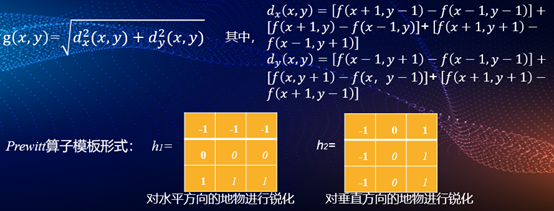
Prewitt算子对边缘的定位不如Roberts算子,但在水平方向和垂直方向的边缘检测结果较好,对噪声有抑制作用,常用于噪声较多、灰度渐变的图像的处理,但处理后图像边缘较宽,而且间断点多。
Sobel算子:
Sobel算子是一种用于边缘检测的离散微分算子,其在Prewitt算法的基础上,对4-邻域采用加权方法进行差分,边缘定位更准确,但检测出的边缘容易出现多像素宽度,对噪声具有平滑作用,常用于噪声较多、灰度渐变图像的处理。

2.功能概述
PIE-Basic软件微分锐化工具通过微分过程增强图像的边缘、轮廓或细节,使图像更加清晰。支持Prewitt算子、Sobel算子、Robert算子三种锐化方式。
Roberts算子提取的边缘线条较粗;Prewitt算子对边缘的定位不如Roberts, Prewitt算子、Sobel算子检测出的边缘容易出现多像素宽度。

3.演示数据
操作流程:
1)选用一景遥感影像,使用【定向滤波】功能,对选取的影像进行微分锐化处理;
2)对处理结果进行分析。
使用数据:
GF1-zcs-sub.tif——为裁剪的某一区域GF1 2m真彩色影像,为微分锐化的测试数据。
4.操作演示
打开PIE-Basic软件,选择菜单栏【图像处理】à【边缘增强】à【微分锐化】, 打开"微分锐化" 对话框:
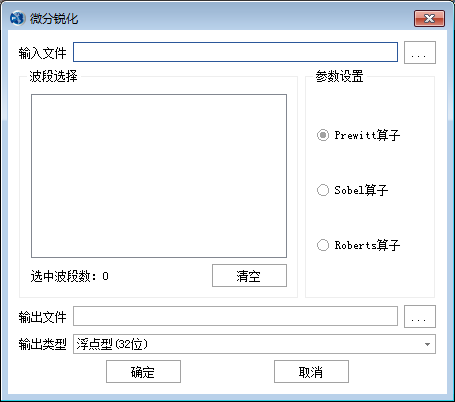
- 输入文件:输入待进行微分锐化处理的影像;
- 波段选择:设置待处理的波段,默认是所有波段,也可以根据需要选择几个波段进行处理;
- 参数设置:选择锐化方式,支持Robert算子、Prewitt算子、Sobel算子三种锐化方式:
锐化方式 | 描述 | 优缺点 |
Robert算子 | 又称为交叉微分算法,是基于交叉差分的梯度算法,是一种利用局部差分算子寻找边缘的算子,边缘定位精度较高,但容易丢失一部分边缘,不具备抑制噪声的能力。 | 常用于处理陡峭边缘且含噪声少的图像,当图像边缘接近于正负45度时,处理效果较好,但对边缘的定位不太准确,提取的边缘线条较粗。 |
Prewitt算子 | 是一种图像边缘检测的微分算子,利用特定区域内像元灰度值产生的差分实现边缘检测,对噪声有抑制作用。 | 适用于噪声较多、灰度渐变的图像的处理,但没有考虑相邻点的距离远近对当前像元的影响,对边缘的定位不如Roberts算子,检测出的边缘容易出现多像素宽度。 |
Sobel算子 | 是一种用于边缘检测的离散微分算子,其在Prewitt算法的基础上,对4-邻域采用加权方法进行差分,提供较为精确的边缘方向信息,对噪声有抑制作用。。 | 考虑了综合因素,对边缘定位更准确,常用于噪声较多、灰度渐变图像的处理,但检测出的边缘容易出现多像素宽度。 |
- 输出文件:设置输出锐化结果的保存路径及文件名;
- 输出类型:设置文件的输出类型,支持输出字节型8位、整型/无符号整型16位、长整型/无符号长整型/浮点型32位、双精度浮点型64位多种位深类型。
所有参数设置完成后,点击【确定】按钮即可进行微分锐化处理。
经Prewitt算子、Sobel算子、Robert算子处理后,图像上边缘轮廓与线性目标被突出显示,而灰度变化比较平缓或均匀的区域(水域、绿地等)几乎是黑色。



 浙公网安备 33010602011771号
浙公网安备 33010602011771号