网络流详解-算法与优化
前言
我经常听别人说网络流很难、建图学不会之类的话,所以很多人都比较晚学习网络流。
但是你别看网络流这个高端的名词,也不过就那样。学习总是不能害怕的,迎难而上才是硬道理。
本文希望能帮助更多的人弄懂网络流,也希望大家再也不会“望网络流而生畏”。
请你一定要相信:任何时候,任何事,总会有最优的解决办法!
我特地将网络流拆成几篇来写,这一篇主要讲解算法,后面将会介绍一些定理和应用。
注:下文用 \(n\) 代表点数,\(m\) 代表边数。
引入
如果提到“流”你会想到什么?最简单的就是水流了。所以很多人用水流来抽象网络流的过程。
现在有一张有向无环图,\(S\) 点是自来水厂,\(T\) 点是废水厂,每条边都有一个容量,超过了容量水就会溢出。换句话说,每条边最多有一定量的水流过。从 \(S\) 点放出足量的水,现在请你求 \(T\) 点最多有多少流量。(流量就定义为水量)
仔细想想觉得很简单?只要找到每条路径中对整条路径水量限制的路径就好了,也就是一条路径中容量最小的边。但是你是否考虑过“分流”的问题呢?你可以把分流理解为水流到了“岔路口”,当然爆搜是可以的。但是如果点数很大呢?
如果你没看懂上面再说什么,那么来看看下面这个实例:

(图源网络,侵删)
我们需要一个改进的算法了。
定义
现在开始就是正式地介绍网络流了,下面会先介绍一些在网络流中的定义。
-
源点(\(S\)),从字面来看是“流出的来源”,你可以把它理解为自来水厂;
-
汇点(\(T\)),即所有水流汇聚的地方,你可以把它理解为废水厂;
-
容量,图中的每一条边都有一个非负容量,你可以理解为这条边最多流过的水量;
上面这整张图就称为“网络流图”,也就是整个水流图。
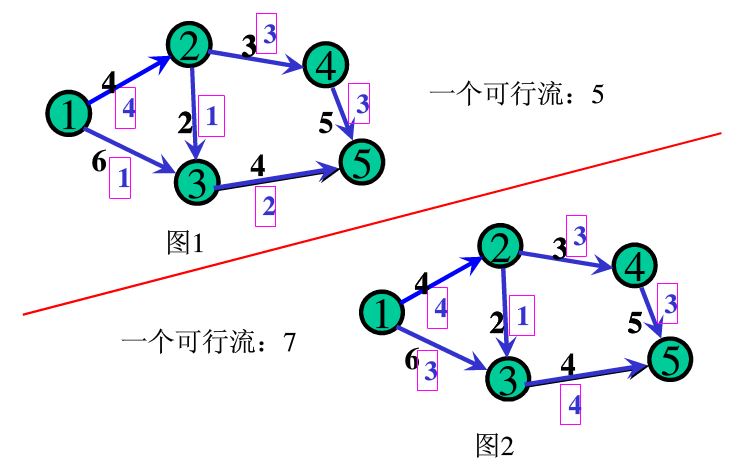
- 可行流:对于源点,流出的(水)量为整张图的流量(不浪费的情况下,也就是水不能溢出);对于汇点,流入的(水)量为整张图的流量。注意每个节点是不能储水的!对于中间的其他点,流入的量会等于流出的量(因为不能储水,不然往哪放啊)。满足这样条件的水流就是一个可行流。
可行,也就是可以这样流。就相当于在 \(S\) 点时选择一个不会浪费的水量放出。当然一般情况下我们都要求最大流。
先别管最大流是啥了,上面的看懂了吗?注意容量和流量两个东西的区别哦!
(图源网络,侵删)
其中注意黑色的是容量,方框里的是流量。
- 最大流:在所有可行流中流量最大的一个可行流。这个应该比较好理解。上图中的最大流是多少呢?就是 \(7\)。
注意:最大流的方案可能不止一个!因此题目如果让你输出路径,一般会有 \(SPJ\)。
下面我们将会讲解求最大流的几种算法。
EK 算法
算法思想
这个算法背景就不介绍了,虽然比较慢,但是也很简单。
- 增广路:即一条 \(S\) 到 \(T\) 的路,一定水流流过了这条路可以使流量增加。(注意这条路不能“满流”,不然水就流不过去了)
一开始流量是 \(0\),我们只需要一直找增广路以增加流量,直到图中不存在增广路(原先的增广路全部满流),这样图中的流就是最大流。这个根据上面的定义应该比较好理解吧。
解释:因为流过增广路可以使流量增加,因此不存在增广路时流量就不能增加了,因此对应了最大流量。
具体操作的时候也比较简单,我们可以一直进行 \(bfs\)(拓展宽度较快,找增广路比较优,\(dfs\) 也可),一直走正边权(容量)的边。然后找到增广路时,限制整条路的流量就是增广里中容量最小的边,把整条路的容量减去这个值。因为每次都会减掉一些已经流过的流量,这样也就能“删除”增广路,也是上面找“正边权”的边的原因。(因为会有 \(0\) 边权)
看着很简单,随便模拟一下就好了。这样就求完最大流了?并不是!
要不然为啥这么多年了最大流算法那么少呢……
考虑一个问题:万一你拓展的增广路不是最优的,后面其实还有更优的路径,但是你流错地方了……
这样就会出错,为什么还会流错呢?准确来讲不是流错,而是不是最优。这样如果图比较大,那么就可能出错。
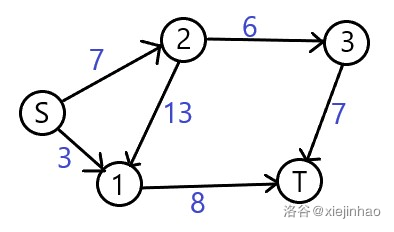
还是这张图,如果选取 \(S=1,T=5\),选择 \((1,2,3,5)\) 这条路增广可以增加 \(2\) 的流量;而选取 \((1,3,5)\) 却可以增加 \(4\) 的流量;前面一种方案显然不会更优,甚至有可能切断其他更优的边。你可能会认为后面继续增广的时候会把流量调到正确对吧?这也是我一开始有的疑虑。下面再引入一张图:
(图为本人原创,若要转载请注明出处)
别看这张图简单,但是其中大有玄妙。这其中选择增广路大有学问:
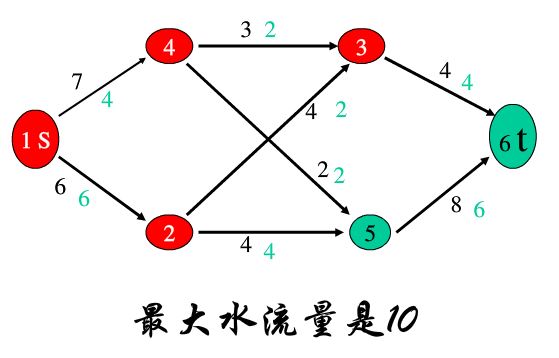
1、按照 \(bfs\) 序,可能会选择 \((S,2,1,T)\),显然 \((S,2)\) 这条边满流了,整条路的流量为 \(7\),然后 \((S,2)\) 就被切断了;然后还会找到 \((S,1,T)\) 这条路,因为刚刚 \((1,T)\) 流过了 \(7\) 的流量,因此此时 \((1,T)\) 仅剩 \(1\) 容量,所以可以增加 \(1\) 的流量。这样计算出来的整张图的最大流是 \(8\);
2、更优的路径:\((S,2,3,T)\),流过 \(6\);\((S,2,1,T)\),流过 \(1\)(\(S,2\) 仅剩 \(1\) 容量);\((S,1,T)\) 流过 \(3\);总容量 \(10\)。
是不是发现直接找增广路会出错了?这张图的最大流就是 \(10\)。
怎么解决问题呢?现在就要讲解最难懂的思想了:反向边。
简单来讲,这条边是用来撤销之前的操作的。(留条后路)一开始反向边的边权是 \(0\)。
在找到一条增广路后,我们会对这条增广路的边权操作一下(减去增加的流量),然后我们要在反向边上加上增加的流量。
让我们看看这样会发生什么?以上面的图为例,选择了 \((S,2,1,T)\),并且添加反向边(边权为 \(0\))的未画出:
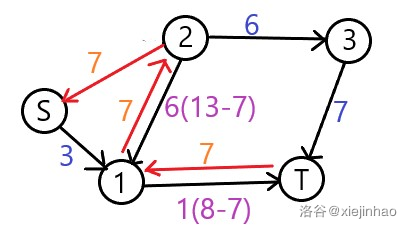
(图为本人原创,如需转载请注明出处)
然后继续找增广路,会走过 \((1,2)\) 一条反向边,走 \((S,1,2,3,T)\),增加 \(3\) 的流量;或者走 \((S,1,T)\) 增加 \(1\),再走 \((S,1,2,3,T)\) 增加 \(2\);反正就是会增加 \(3\) 的流量。然后加上面所计算的 \(7\),答案为 \(10\),正确!
为什么反向边有这个作用?你有没有发现,在选择了 \((S,2,1,T)\) 之后,添加反向边就像是给 \((S,1)\) 这条边留了“后路”;在走 \((S,1)\) 这条边的时候,会把原本属于这条边的流量通过 \((1,2)\) 这条反向边走出去,就像是撤销了之前的操作!感觉操作了一次还留了后路,真香!
为什么这样是正确的?你可以理解为:一开始是“尝试性”去找增广路,有可能有些流量需要“调整”,反向边起到了这个调整的作用。为了大家感性理解,这里不讲冗长的证明,你只需理解上面的图和下面一小段文字解释就可以了。
不知道这里大家看不看得懂反向边这一波优秀的操作呢?如果大家有兴趣可以去看看严谨的证明。
思路总结和性能分析
所以我们得到了一个正确的算法:
1、找增广路,并给整条路减去增加的流量,答案累加上增加的流量;
2、给反向边加上流量用来撤回;
3、重复 1、2 两步直到不存在增广路,此时的答案就是整张图的最大流。
感觉简单极了!一开始自来水场的问题也可以解决了。但是这个算法的时间复杂度呢?
我们分析一下:最坏的情况下,每次增广都只能增广一条边,因此需要 \(m-1\) 次;\(bfs\) 时存在反向边,因此最坏情况下要 \(n*m\) 次遍历整张图,所以总的时间复杂度是 \(O(NM^2)\)。但是我们都说了是一般情况,因此随机情况下这个是远远达不到上界的,还是可以放心使用(当然出题人也可能卡)。
模板题:网络最大流 (因为模板到处都是我就拿洛谷的了)
代码
回顾上面的思路,我们可以得出下面的代码:
#include<bits/stdc++.h>
using namespace std;
const int inf = 1 << 29;
const int N = 1e4 + 10;
const int M = 2e5 + 10;
int head[N], edge[M], ver[M], Next[M], tot;
void add(int x, int y, int v) {
ver[++tot] = y, edge[tot] = v, Next[tot] = head[x], head[x] = tot;
ver[++tot] = x, edge[tot] = 0, Next[tot] = head[y], head[y] = tot;
}
// 一开始建正边的时候顺便建反边,注意初始反边权值为 0
// 注意:tot 从 1 开始 接下来就是 正反对应 (2,3), (3,4)
// 正边 x1 与反边 x2 的关系是 x1 ^ 1 = x2 , x2 ^ 1 = x1
// 注意正反是相对的,反边的反边就是正边(负负得正)
// 你需要把正边理解成 原来存在的边
int pre[N], incf[N], n, m, s, t;
bool vis[N];
bool bfs() { // 找增广路
memset(vis, 0, sizeof vis);
queue<int> q;
q.push(s), vis[s] = 1;
incf[s] = inf;
while(q.size()) {
int x = q.front(); q.pop();
for(int i = head[x]; i; i = Next[i])
if(edge[i] and !vis[ver[i]]) {
int y = ver[i], val = edge[i];
incf[y] = min(incf[x], val);
// incf 记录增广路上最小边容量
pre[y] = i, q.push(y), vis[y] = 1;
// pre 数组记录转移路径,增广完之后要更新边权
if(y == t) return 1; // 有一条路增广到汇点就可以
}
}
return 0; // 增广不到汇点,因此不存在增广路了
}
int maxflow = 0;
void update() { // 更新边权
int x = t;
while(x != s) {
int i = pre[x];
edge[i] -= incf[t];
edge[i ^ 1] += incf[t];
x = ver[i ^ 1];
}
maxflow += incf[t];
}
int main() {
tot = 1;
scanf("%d %d %d %d", &n, &m, &s, &t);
for(int i = 1, x, y, V; i <= m; i++) {
scanf("%d %d %d", &x, &y, &V);
add(x, y, V);
} // 建图 比较简单
while(bfs()) update();
// 1. 找增广路(bfs)
// 2. 正边减去增加流量,反边加上(update)
// 3. while 重复 1、2,直到不存在增广路退出
printf("%d\n", maxflow);
return 0;
}
注意上面用了一个小技巧,就是正边与反边的关系只需要异或上 \(1\),这个是可以记住的。
(反正可以过模板就对了)
但是你会发现这个算法真的不是很优秀啊……因为每次只能增广一条路,要是能多条路增广呢?
dinic 算法
算法思路
- 残量网络:在增广后剩余流量组成的网络。(你就顾名思义吧,不要那么复杂)
其实我们上面的 \(EK\) 算法已经讲清楚了这个算法的步骤,不过它找增广路的效率实在是太低了!
考虑刚才进行的 \(bfs\),它找到了一条 \(S-T\) 的“最短路径”,但是确实整个最短路图上的一条链而已!
我们干脆对整张图进行“分层”,上一层节点可以到达下一层节点,然后统一增广,可以证明这样找增广路的效率最高。
具体分层就是下一层的编号等于上一层的编号加一,反正模拟起来挺简单的。但是我们不是要增广嘛?分层完了有啥用啊!
别急,这次我们可以直接 \(dfs\) 增广,具体看下面的代码:
bool bfs() { // d 数组是分层的数组
memset(d, 0, sizeof(d));
queue<int> q;
q.push(s), d[s] = 1;
while(q.size()) {
int x = q.front(); q.pop();
for(int i = head[x]; i; i = Next[i])
if(v[i] && !d[ver[i]]) {
q.push(e[i]);
d[ver[i]] = d[x] + 1;
if(ver[i] == t) return 1;
}
}
return 0;
}
int dinic(int x, int flow) { // flow 当前流量
if(x == t) return flow;
int rest = flow, k; // rest 剩余流量
for(int i = head[x]; i && rest; i = Next[i])
if(edge[i] && d[ver[i]] == d[x] + 1) {
// 这条边在分层的图上 注意要有容量才增广
k = dinic(ver[i], min(rest, edge[i]));
if(k == 0) d[ver[i]] = 0;
// 小优化:一个点内子树流量为 0,后面就不用再遍历了
// 因为无论如何遍历都是 0
edge[i] -= k, edge[i ^ 1] += k;
rest -= k; // 更新流量
}
return flow - rest;
}
现在就体现出分层图的作用了吧!(变量名和模板题都是一样的)
当然此“分层图”非彼“分层图”(算了你都绕晕了),后面我还会提到。
当前弧优化
原理:用一个数组 \(cur\) 代替 \(head\) 进行增广。
\(cur\) 数组是什么呢?考虑一个节点 \(x\),他有很多儿子(指分完层的图上的),干脆从 \(1-k\) 编号吧;那假设我们把它 \(1,2,3\) 儿子的流量都用完了,也就是它到儿子 \(1,2,3\) 的边已经没有容量(满流),那么我们下次增广从 \(4\) 开始就好了,没有必要在 \(1-3\) 上浪费时间。这也就是 \(cur\) 数组的正确性。
以上的这个优化就叫做当前弧优化。其实图论中,特别是网络,弧就相当于边。反正你好理解就行。
具体实现的时候,因为 \(bfs\) 分层还要用到原来的数组 \(head\),因此在增广前先把 \(head\) 复制一份给 \(cur\),然后用 \(cur\) 增广;增广的时候,更新 \(cur\),\(cur_x\) 表示当前节点遍历到哪条边了,具体的修改就是这样的:
int dfs(int x, int flow) {
if(x == t) return flow;
int rest = flow, k;
for(int i = cur[x]; i && rest; i = Next[i]) {
cur[x] = i; // 更新当前点到哪儿了
if(edge[i] && d[ver[i]] == d[x] + 1) {
// 这条边在分层的图上 注意要有容量才增广
k = dfs(ver[i], min(rest, edge[i]));
if(k == 0) d[ver[i]] = 0;
// 小优化:一个点内子树流量为 0,后面就不用再遍历了
// 因为无论如何遍历都是 0
edge[i] -= k, edge[i ^ 1] += k;
rest -= k; // 更新流量
}
}
return flow - rest;
}
int dinic() {
int maxflow = 0, flow;
while(bfs()) {
for(int i = 1; i <= N; i++)
cur[i] = head[i]; // N 最大点数
// 具体就是复制,实在不行就 memcpy
while((flow = dfs(s, inf)))
maxflow += flow;
} return maxflow;
}
这次我给出了更新最大流的代码(最后一段),即使是原先没有优化的 \(dinic\) 也是这样更新,\(inf\) 需要赋一个恰当的值,不要爆 \(\text{int}\) 或者 \(\text{long long}\) 了。(\(bfs\) 部分是一样的)
性能分析
先分析 \(dfs\):修改增广路上边的流量。至多会增广 \(m\) 次,一条增广路的长度至多是 \(n\),所以这一部分的复杂度是 \(O(nm)\)。dfs遍历时找增广路失败时经过的边。由于一旦从某条边出发找最短路失败了,我们就不会再走那条边(这个情况是当前弧优化的),所以这一部分的复杂度是 \(O(m)\) 的。故而dfs增广的复杂度是 \(O(nm)\)。
再分析 \(bfs\):每次 \(dfs\) 增广后我们都会重新 \(bfs\) 分层整张图,因此残余网络上 \(S\) 到 \(T\) 的最短路长度一定不会减少,所以至多重建 \(n-1\) 次图。当 \(n,m\) 同阶,可以认为这一部分时间复杂度是 \(O(n)\)。
因此 \(dinic\) 的时间复杂度上界 是 \(O(n^2m)\),会比 \(EK\) 好些。
但是注意:网络流除非出题人可以卡,否则时间复杂度都是远远达不到上界的!
但是现在出题人都有共识吧……非特殊情况绝对不卡 \(dinic\)。
(以上内容一部分改编自网络,侵删)
完整代码
还是以模板为例,为了防止你再向上翻,所以再给一次连接:网络最大流
#include<bits/stdc++.h>
using namespace std;
const int inf = 1 << 29;
const int N = 1e4 + 10;
const int M = 2e5 + 10;
int head[N], edge[M], ver[M], Next[M], tot;
void add(int x, int y, int v) {
ver[++tot] = y, edge[tot] = v, Next[tot] = head[x], head[x] = tot;
ver[++tot] = x, edge[tot] = 0, Next[tot] = head[y], head[y] = tot;
}
int d[N], cur[N], n, m, s, t, maxflow;
bool bfs() {
memset(d, 0, sizeof(d)), d[s] = 1;
queue<int> q; q.push(s);
while(q.size()) {
int x = q.front(); q.pop();
for(int i = head[x]; i; i = Next[i])
if(edge[i] && !d[ver[i]]) {
q.push(ver[i]);
d[ver[i]] = d[x] + 1;
if(ver[i] == t) return 1;
}
}
return 0;
}
int dinic(int x, int flow) {
if(x == t) return flow;
int rest = flow, k;
for(int i = cur[x]; i && rest; i = Next[i]) {
cur[x] = i;
if(edge[i] && d[ver[i]] == d[x] + 1) {
k = dinic(ver[i], min(rest, edge[i]));
if(k == 0) d[ver[i]] = 0;
edge[i] -= k, edge[i ^ 1] += k;
rest -= k;
}
}
return flow - rest;
}
int main() {
tot = 1;
scanf("%d %d %d %d", &n, &m, &s, &t);
for(int i = 1, x, y, V; i <= m; i++) {
scanf("%d %d %d", &x, &y, &V);
add(x, y, V);
}
int flow = 0;
while(bfs()) {
for(int i = 1; i <= n; i++)
cur[i] = head[i];
while((flow = dinic(s, inf)))
maxflow += flow;
}
printf("%d\n", maxflow);
return 0;
}
是不是感觉很简单啊
好吧请你过下这一题:网络最大流(加强版)
我:\(T\) 飞了。
大佬:我用 \(dinic\) * 过去啦!
我:……
好吧你还是很强,这里 \(dinic\) 的做法还是不谈了,因为已经可以卡到 \(T\) 了。
再次考虑有没有其他更好的算法……
当然你可能听别人说过 \(\text{SAP}\) 和 \(\text{ISAP}\),但是前者的时间复杂度上界为 \(O(NM^2)\),后者为 \(O(N^2M)\),可以说也是没有办法通过这种毒瘤题的……(不然为何叫加强版)所以,换个思路试试?
预流推进-最高标号法
其实这个算法就像是暴力的思路。一开始碰到这种题目,不会网络流,就想:能不能一条路一条路把流量推出去,但是后面感觉不可做。但是确实有大佬发明出了这种东西……说不定你在想暴力的时候多钻研一下,就能自己 \(yy\) 出预留推进了呢(雾
其实最高标号预流推进你可以叫它 \(\text{HLPP}\)。
(其实预流推进也有很多种
(但是还是写 \(\text{HLPP}\) 好点
算法思想
还记得我们一开始说的水的问题嘛?我们可以让源点流出 \(inf\) 的水,即使把水管撑爆了也不要紧,反正最后到达 \(T\) 的就那么多。你可能一开始想的暴力就是这样的吧!但是你很快发现你打完之后竟然是错的,或者 \(T\) 到飞起。
为了防止出现 \(\text{TLE}\) 的情况,也就是出现两个节点,因为没有确定顺序推来推去……所以我们给每个节点确定一个高度 \(h\),就像现实中的水流一样从高向低流。特别的,源点的高度为 \(n\),其他点高度都可以为 \(0\)。
因为我们一开始放出了 \(inf\) 的流量,导致每个节点会流很多超过能流出的流量(当然流入还是要按照容量限制流入),我们规定一个节点可以暂时储存流量,超出的流量暂且叫它“超额流”。我们只需要把这些超额流每次推出去就好了。当遇到一个点周围所有的点高度都大于它时,我们就抬高它的高度。抬高到什么高度呢?其实我们只要恰好让它流出去就行,所以抬高到它周围高度最小的节点的高度 \(+1\) 就行。
对于 \(x\) 节点每次流出时,假设可以留到 \(y\),当且仅当 \(h_x=h_y+1\)。为什么是等于?因为跟据我们每次抬高的性质,也是为了后面的一个小小优化。(注意要有 \(x\) 到 \(y\) 的有容量的边才行哦)每次能流出的超额流量就是 \((x,y)\) 的容量与超额流量两者的最小值。
接下来用 \(rest\) 数组表示一个节点的超额流量。\(\text{Tarjan}\) 发现每次取出高度最高的节点进行推进(也就是推出超额流)操作,时间复杂度最小。为什么呢?你可以理解成高度高的先给了低的,然和低会把这些流传给更低的,显然会少遍历一些遍历过的节点。这个可以使用优先队列维护,只要一个节点超额流不为 \(0\),扔进去就好了。
注意:每一次推进我们都尽量推出多的超额流;特别的,如果一个节点高度抬高到超过了 \(S\) 的高度,则这个多的流会被退回给 \(S\),所以这样的正确性是可以保证的。
然后还是考虑下一开始设的操作,我们发现除了源点外其他点高度都为 \(0\) 会很浪费时间——因为要抬高很多次。所以我们干脆从 \(T\) 开始 \(bfs\),像 \(dinic\) 那样分层设置高度就可以了。(从 \(T\) 开始是因为 \(T\) 的高度最小)
下面是推进操作和抬高操作的代码:
void push(int x) { // 推进操作
for(int i = head[x], y; i and rest[x]; i = Next[i]) {
if(x != s and h[y = ver[i]] + 1 != h[x]) continue;
if(!edge[i]) continue;
// 1.非源点或高度不满足限制,不能走
// 2.这条边没有容量了,不能走
int flow = min(rest[x], edge[i]);
rest[x] -= flow, rest[y] += flow;
edge[i] -= flow, edge[i ^ 1] += flow;
// 反向边还是要有的(万一推错了呢)
if(y != s and y != t and !v[y])
q.push(make_pair(h[y], y)), v[y] = 1;
// v 1/0 数组代表一个节点 是/否 在队列中
}
}
void update(int x) { // 更新高度
h[x] = inf;
for(int i = head[x]; i; i = Next[i])
if(edge[i] and h[ver[i]] + 1 < h[x])
h[x] = h[ver[i]] + 1;
}
\(q\) 是 \(STL\) 实现的优先队列,内容为 \(pair\),第一关键字是高度,第二关键字是编号。
整体感觉实现起来很简单?具体代码就是那样了,也不给出了,因为可能跑的很慢过不了这题……
总结来说:
1、从 \(T\) 开始 \(bfs\), 给每个点分层,设置初始高度,然后 \(h_s=n\)并把 \(S\) 放入队列;
2、推进(上面的 \(push\) 函数),每次取出高度最高的节点;
3、若一个节点的高度比他周围节点低,则抬高这个节点的高度至它周围节点的最低高度 \(+1\);
4、重复步骤 \(2,3\) 直至队列为空,此时汇点的超额流就是整张图的最大流。
正确性显然吧!注意如果一个节点的超额流为 \(0\) 则不用入队哦!每个节点都恰好没有超额的流量,所有流量要么退回给 \(S\)(不得已的情况,即汇点已满),要么给了汇点,所以是正确的!
gap 优化
故名思意,“断层优化”。为什么“断层”?……
好吧其实这个优化比较简单,就是说:如果一个高度 \(h'\) 不存在,那么所有高度比 \(h'\) 高的点都不能到达汇点 \(T\),为什么呢?想想上面的推进代码,必须要两点之间高度严格差 \(1\),如果有一个高度不存在,那么比这个高度高的点就断开了,没有办法下传,因此这样是对的。
事实证明这个优化挺有用的,起码比上面的朴素实现快了很多!(虽然我没试过)
代码
注:这份代码是有 \(gap\) 优化的,没有 \(gap\) 优化的情况可以直接把和 \(gap\) 有关部分去掉。
还是再放上题目链接:网络最大流(加强版)
#include<bits/stdc++.h>
#define inf (1LL << 60)
using namespace std;
const int N = 1.2e3 + 10;
const int M = 2.4e5 + 10;
int head[N], ver[M], Next[M], cnt = 1;
long long edge[M];
void add(int x, int y, int v) {
ver[++cnt] = y, edge[cnt] = v;
Next[cnt] = head[x], head[x] = cnt;
ver[++cnt] = x, edge[cnt] = 0;
Next[cnt] = head[y], head[y] = cnt;
}
int h[N], gap[N * 2], n, m, s, t;
bool bfs() {
memset(h, 0x3f, sizeof h), h[t] = 0;
queue<int> q; q.push(t);
while(q.size()) {
int x = q.front(); q.pop();
for(int i = head[x]; i; i = Next[i])
if(edge[i ^ 1] and h[ver[i]] > h[x] + 1) {
h[ver[i]] = h[x] + 1;
q.push(ver[i]);
}
}
return h[s] != 0x3f3f3f3f;
}
priority_queue< pair<int, int> > q;
long long rest[N]; bool v[N];
void push(int x) {
for(int i = head[x], y; i and rest[x]; i = Next[i]) {
if(h[x] != h[y = ver[i]] + 1 and x != s) continue;
if(!edge[i]) continue;
int flow = min(rest[x], edge[i]);
rest[x] -= flow, rest[y] += flow;
edge[i] -= flow, edge[i ^ 1] += flow;
if(y != s and y != t and !v[y])
q.push(make_pair(h[y], y)), v[y] = 1;
}
}
void update(int x) {
h[x] = 1 << 30;
for(int i = head[x]; i; i = Next[i])
if(edge[i] and h[ver[i]] + 1 < h[x])
h[x] = h[ver[i]] + 1;
}
void Gap(int x) {
for(int i = 1; i <= n; i++)
if(i != s and i != t and h[i] > h[x] and h[i] < n + 1)
h[i] = n + 1;
}
long long HLPP() {
if(!bfs()) return 0; // 无解
h[s] = n, rest[s] = inf, push(s);
// 可以先推进 s,因为 s 推出了无穷的流量
// 这就意味着 s 的流量推不完的 所以先推
// 即使 s 还有多也不要紧
for(int i = 1; i <= n; i++)
if(h[i] <= n) gap[h[i]]++;
while(q.size()) {
int x = q.top().second;
q.pop(), v[x] = 0, push(x);
if(rest[x]) { // 还有剩余无法流出 需要抬高
if(!--gap[h[x]]) Gap(x); // gap 优化
update(x), gap[h[x]]++, v[x] = 1;
q.push(make_pair(h[x], x));
}
}
return rest[t];
}
int main() {
scanf("%d %d %d %d", &n, &m, &s, &t);
for(int i = 1, x, y, v; i <= m; i++) {
scanf("%d %d %d", &x, &y, &v);
add(x, y, v);
}
printf("%lld\n", HLPP());
return 0;
}
彩蛋
当然加个快读可能更快……还有一个优化叫做全局重贴标签,也就是边推进边抬高高度,听说很快?
反正这也就够了,起码模板题跑的效果还不错。
但是我不得不说很多人写的 \(hlpp\) 是有问题的,所以才会导致没优化常数或没采取其他优化方式过不了……
甚至还有更离谱的,普通模板跑的比 \(EK\) 都慢……大家写代码要认真点啊!
当然还有很多奇淫技巧优化的,可以看看花姐写的(除了码风不是那么优秀其他都很好啊)
链接给上:%%%花姐
当然 \(dinic\) 混过去的代码怎么能没有呢!看这
虽然说被 \(hack\) 了,但是怎么还能过呢……
后记
完结撒花!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号