
AI | 强化学习 | Sarsa
AI | 强化学习 | Sarsa
首先感谢莫烦大佬的公开教程。
https://github.com/MorvanZhou/Reinforcement-learning-with-tensorflow
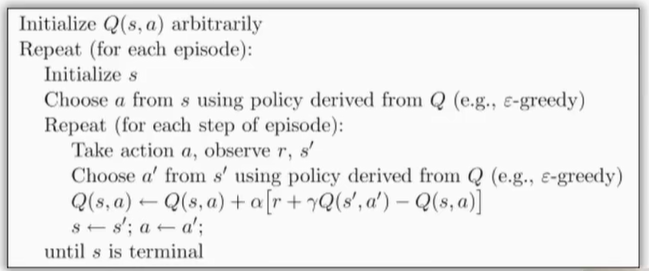
sarsa是强化学习中的一种,属于在线学习。【走到哪一步学哪一步】
和qlearning类似,但是qlearning属于离线学习。
这次实验是三个文件,一个是迷宫环境,一个是强化学习决策类,一个是运行更新的脚本。
RL_brain.py:
"""
This part of code is the Q learning brain, which is a brain of the agent.
All decisions are made in here.
View more on my tutorial page: https://morvanzhou.github.io/tutorials/
"""
import numpy as np
import pandas as pd
# 父类
class RL(object):
def __init__(self, action_space, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
self.actions = action_space # a list
self.lr = learning_rate
self.gamma = reward_decay
self.epsilon = e_greedy
self.q_table = pd.DataFrame(columns=self.actions, dtype=np.float64)
# 查看q表中有没有这个state,如果没有就添加上。
def check_state_exist(self, state):
if state not in self.q_table.index:
# append new state to q table
self.q_table = self.q_table.append(
pd.Series(
[0]*len(self.actions),
index=self.q_table.columns,
name=state,
)
)
# 选择决策
# 90%最优解,10%随机采取行动
def choose_action(self, observation):
self.check_state_exist(observation)
# action selection
if np.random.rand() < self.epsilon:
# choose best action
state_action = self.q_table.loc[observation, :]
# some actions may have the same value, randomly choose on in these actions
action = np.random.choice(state_action[state_action == np.max(state_action)].index)
else:
# choose random action
action = np.random.choice(self.actions)
return action
def learn(self, *args):
pass
# off-policy
# Qlearning算法
class QLearningTable(RL):
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
super(QLearningTable, self).__init__(actions, learning_rate, reward_decay, e_greedy)
def learn(self, s, a, r, s_):
self.check_state_exist(s_)
q_predict = self.q_table.loc[s, a]
if s_ != 'terminal':
q_target = r + self.gamma * self.q_table.loc[s_, :].max() # next state is not terminal
else:
q_target = r # next state is terminal
self.q_table.loc[s, a] += self.lr * (q_target - q_predict) # update
# on-policy
class SarsaTable(RL):
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
super(SarsaTable, self).__init__(actions, learning_rate, reward_decay, e_greedy)
# 比Qlearning多了下一个action的参数
def learn(self, s, a, r, s_, a_):
self.check_state_exist(s_) # 检查新的state有没有存在
q_predict = self.q_table.loc[s, a]
if s_ != 'terminal':
q_target = r + self.gamma * self.q_table.loc[s_, a_] # next state is not terminal
else:
q_target = r # next state is terminal
# 更新q表
self.q_table.loc[s, a] += self.lr * (q_target - q_predict) # update
run_this.py:
"""
Sarsa is a online updating method for Reinforcement learning.
Unlike Q learning which is a offline updating method, Sarsa is updating while in the current trajectory.
You will see the sarsa is more coward when punishment is close because it cares about all behaviours,
while q learning is more brave because it only cares about maximum behaviour.
"""
from maze_env import Maze
from RL_brain import SarsaTable
def update():
for episode in range(100):
# initial observation
observation = env.reset()
# RL choose action based on observation
action = RL.choose_action(str(observation))
while True:
# fresh env
env.render()
# RL take action and get next observation and reward
observation_, reward, done = env.step(action)
# RL choose action based on next observation
action_ = RL.choose_action(str(observation_))
# RL learn from this transition (s, a, r, s, a) ==> Sarsa
RL.learn(str(observation), action, reward, str(observation_), action_)
# swap observation and action
observation = observation_
action = action_
# break while loop when end of this episode
if done:
break
print(f'round: {episode}')
print(RL.q_table) # 输出查看q表
# end of game
print('game over')
env.destroy()
if __name__ == "__main__":
env = Maze()
RL = SarsaTable(actions=list(range(env.n_actions)))
env.after(100, update)
env.mainloop()
本文来自博客园,作者:Mz1,转载请注明原文链接:https://www.cnblogs.com/Mz1-rc/p/17014859.html
如果有问题可以在下方评论或者email:mzi_mzi@163.com

