
STM32L0 HAL库 TIM定时1s
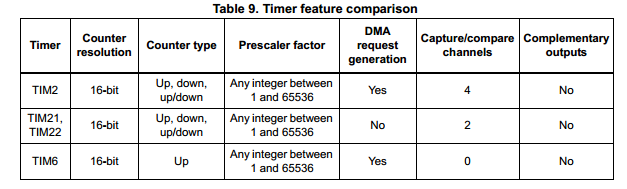
STM32L0的定制器资源:
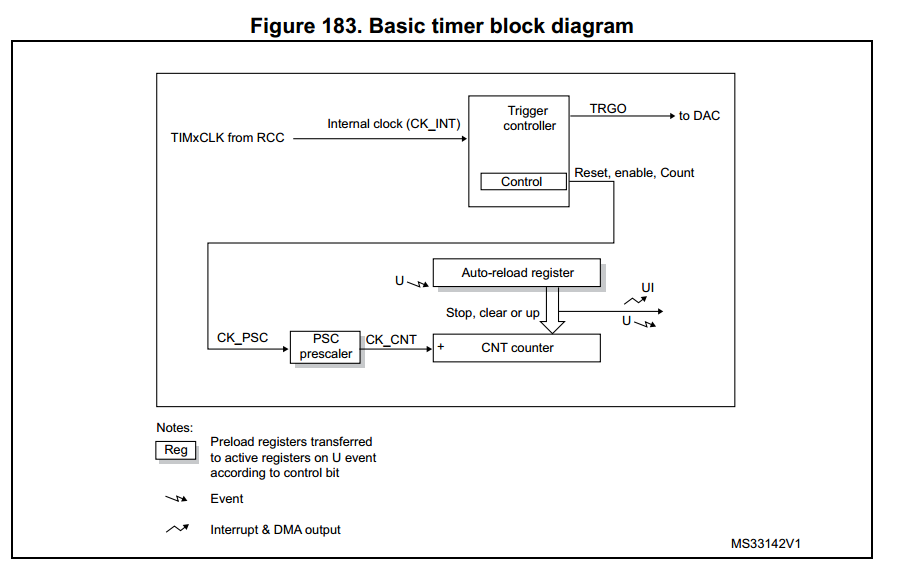
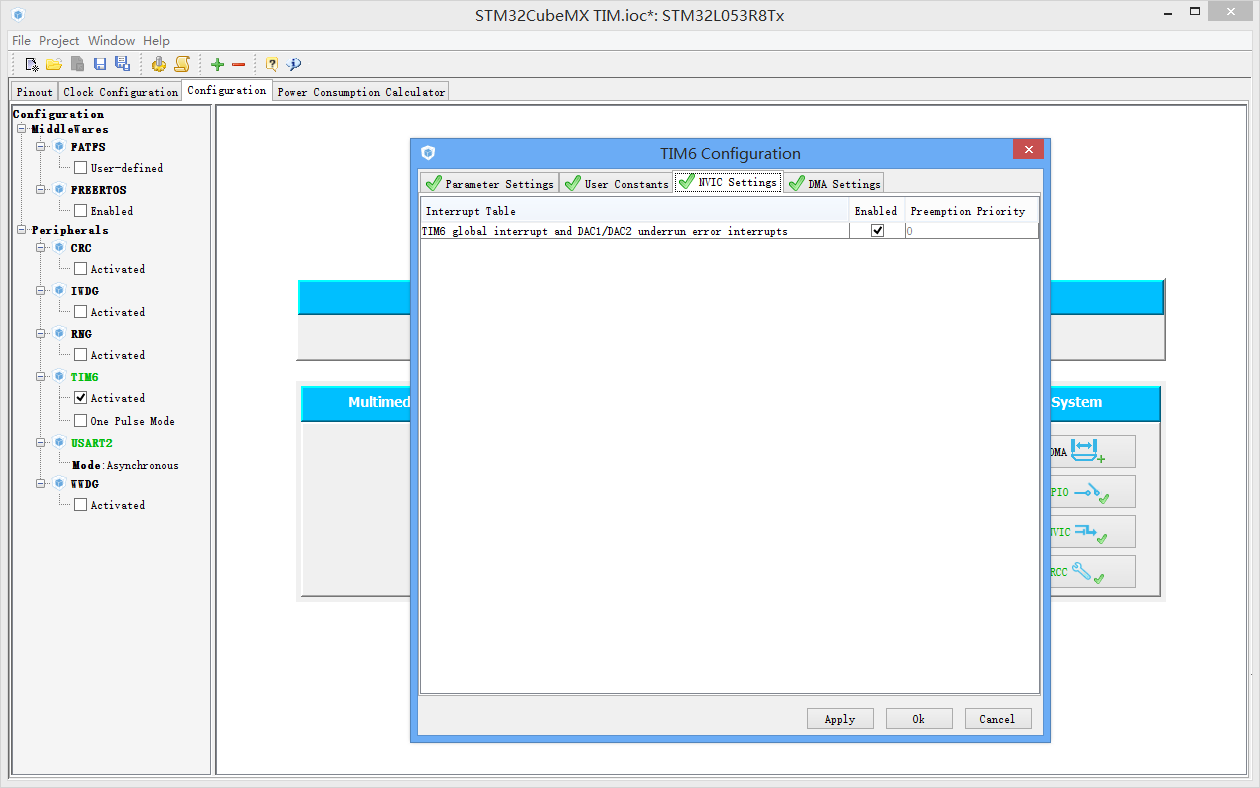
本实验使用TIM6
HSI频率是16Mhz,则单指令周期是1/16Mhz
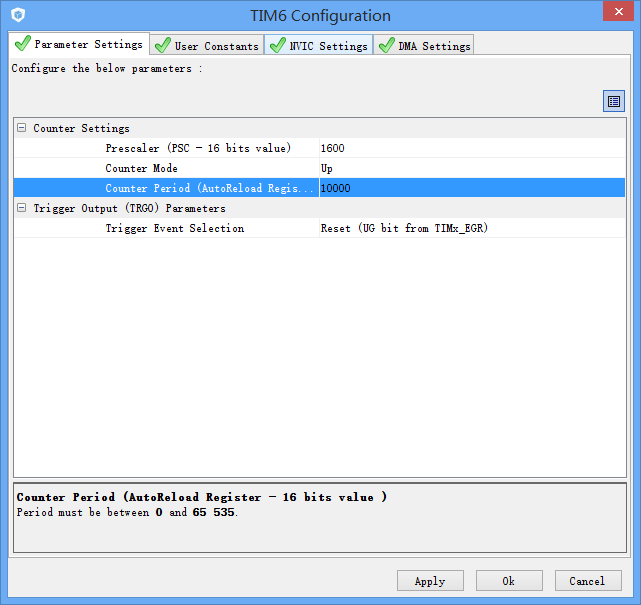
预分频设置为1600,则每跑1600下,定时器加1,相当于定时器加1的时间是1600*(1/16Mhz)=100us
定义周期为10000,则计数到10000时候,定时器溢出,定时器溢出的时间为10000*100us=1s
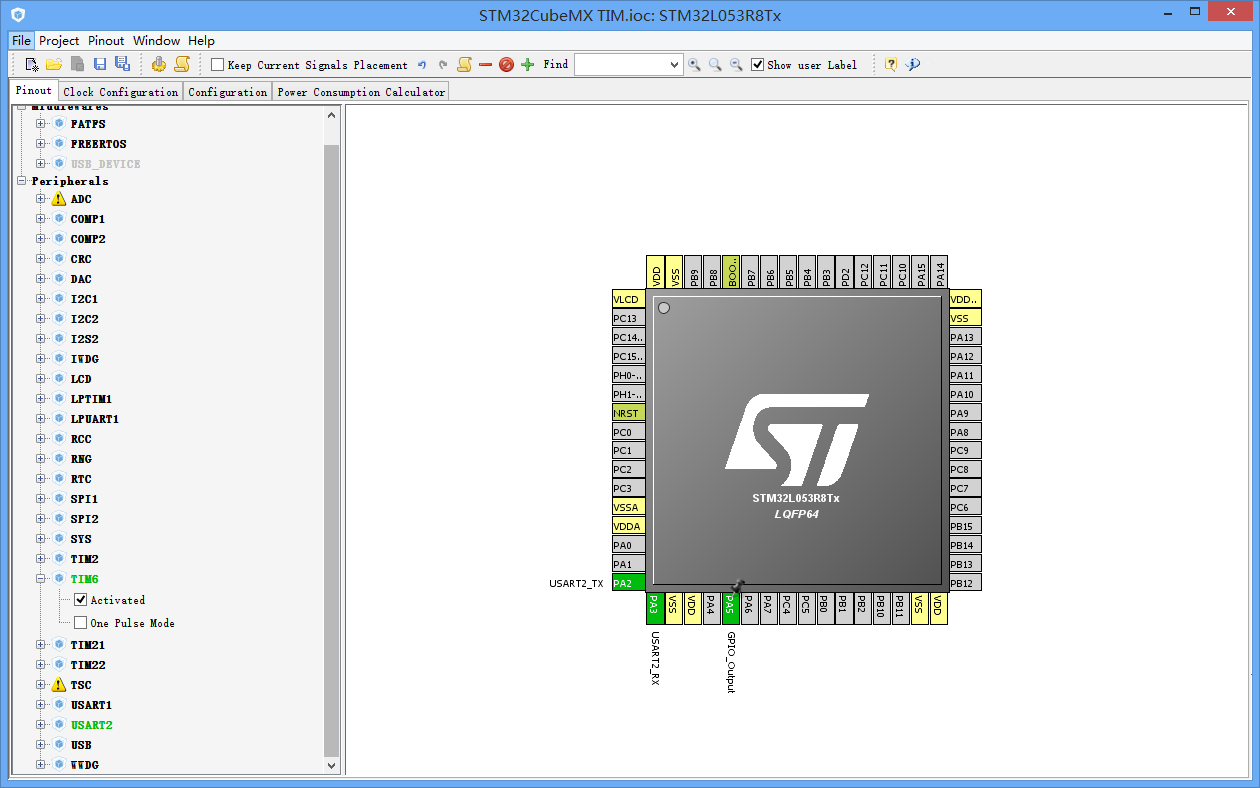
有了这几个基本参数,我们按照如下设置CUBEMX
HAL的库的调用:
HAL_TIM_Base_Init这个已经在CubeMX自动生成和调用了,不用再管了。
HAL_TIM_Base_Start_IT需要自己写代码启动中断模式
另外计数器溢出回调函数需要自己添加HAL_TIM_PeriodElapsedCallback
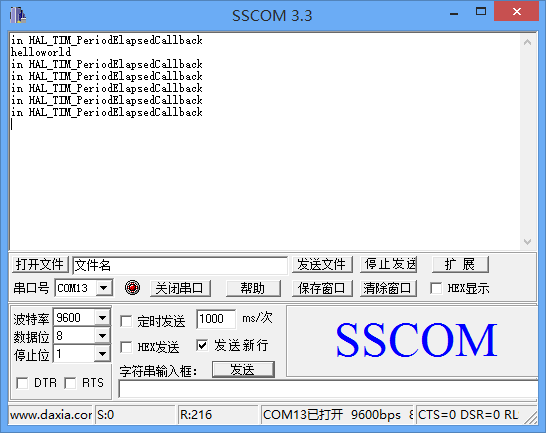
实现1s进入一次回调函数,串口返回一条指令:
测试代码如下:
/** ****************************************************************************** * File Name : main.c * Description : Main program body ****************************************************************************** * * COPYRIGHT(c) 2015 STMicroelectronics * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * 1. Redistributions of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of its contributors * may be used to endorse or promote products derived from this software * without specific prior written permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE * IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE * DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE * FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL * DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR * SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, * OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE * OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/ #include "stm32l0xx_hal.h" /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private variables ---------------------------------------------------------*/ TIM_HandleTypeDef htim6; UART_HandleTypeDef huart2; /* USER CODE BEGIN PV */ /* Private variables ---------------------------------------------------------*/ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); static void MX_GPIO_Init(void); static void MX_TIM6_Init(void); static void MX_USART2_UART_Init(void); /* USER CODE BEGIN PFP */ /* Private function prototypes -----------------------------------------------*/ /* USER CODE END PFP */ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* Configure the system clock */ SystemClock_Config(); /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_TIM6_Init(); MX_USART2_UART_Init(); /* USER CODE BEGIN 2 */ //启动定时器中断 if(HAL_TIM_Base_Start_IT(&htim6) != HAL_OK) { /* Starting Error */ while(1); } unsigned char txData[]={"helloworld\r\n"}; HAL_UART_Transmit(&huart2,txData,sizeof(txData)-1,0xffff); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ // HAL_GPIO_WritePin(GPIOA,GPIO_PIN_5,GPIO_PIN_SET); // HAL_Delay(1000); // HAL_GPIO_WritePin(GPIOA,GPIO_PIN_5,GPIO_PIN_RESET); // HAL_Delay(1000); HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_5); HAL_Delay(1000); } /* USER CODE END 3 */ } /** System Clock Configuration */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct; RCC_ClkInitTypeDef RCC_ClkInitStruct; RCC_PeriphCLKInitTypeDef PeriphClkInit; __PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.HSICalibrationValue = 16; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE; HAL_RCC_OscConfig(&RCC_OscInitStruct); RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0); PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART2; PeriphClkInit.Usart2ClockSelection = RCC_USART2CLKSOURCE_PCLK1; HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit); HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000); HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK); } /* TIM6 init function */ void MX_TIM6_Init(void) { TIM_MasterConfigTypeDef sMasterConfig; htim6.Instance = TIM6; htim6.Init.Prescaler = 1600; htim6.Init.CounterMode = TIM_COUNTERMODE_UP; htim6.Init.Period = 10000; HAL_TIM_Base_Init(&htim6); sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; HAL_TIMEx_MasterConfigSynchronization(&htim6, &sMasterConfig); } /* USART2 init function */ void MX_USART2_UART_Init(void) { huart2.Instance = USART2; huart2.Init.BaudRate = 9600; huart2.Init.WordLength = UART_WORDLENGTH_8B; huart2.Init.StopBits = UART_STOPBITS_1; huart2.Init.Parity = UART_PARITY_NONE; huart2.Init.Mode = UART_MODE_TX_RX; huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart2.Init.OverSampling = UART_OVERSAMPLING_16; huart2.Init.OneBitSampling = UART_ONEBIT_SAMPLING_DISABLED; huart2.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT; HAL_UART_Init(&huart2); } /** Configure pins as * Analog * Input * Output * EVENT_OUT * EXTI */ void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; /* GPIO Ports Clock Enable */ __GPIOA_CLK_ENABLE(); /*Configure GPIO pin : PA5 */ GPIO_InitStruct.Pin = GPIO_PIN_5; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_PULLUP; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } /* USER CODE BEGIN 4 */ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if (htim->Instance == htim6.Instance) { unsigned char txData[]={"in HAL_TIM_PeriodElapsedCallback\r\n"}; HAL_UART_Transmit(&huart2,txData,sizeof(txData)-1,0xffff); } } /* USER CODE END 4 */ #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t* file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /** * @} */ /** * @} */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/


文章对您有帮助,开心可以打赏我,金额随意,欢迎来赏!
需要电子方面开发板/传感器/模块等硬件可以到我的淘宝店逛逛

 浙公网安备 33010602011771号
浙公网安备 33010602011771号