

This library allows you to control unipolar or bipolar stepper motors. To use it you will need a stepper motor, and the appropriate hardware to control it. For more on that, see Tom Igoe's notes on steppers.
函数
Stepper(steps, pin1, pin2) 步进电机定义
Stepper(steps, pin1, pin2, pin3, pin4) 步进电机定义
Description 解释
This function creates a new instance of the Stepper class that represents a particular stepper motor attached to your Arduino board. Use it at the top of your sketch, above setup() and loop(). The number of parameters depends on how you've wired your motor - either using two or four pins of the Arduino board.
Parameters 参数
steps: the number of steps in one revolution of your motor. If your motor gives the number of degrees per step, divide that number into 360 to get the number of steps (e.g. 360 / 3.6 gives 100 steps). (int) 一圈对应的步数
pin1, pin2: two pins that are attached to the motor (int)
pin3, pin4: optional the last two pins attached to the motor, if it's connected to four pins (int)
Returns A new instance of the Stepper motor class.
setSpeed(rpm) 速度设定
Description 解释
Sets the motor speed in rotations per minute (RPMs). This function doesn't make the motor turn, just sets the speed at which it will when you call step().
Parameters 参数
rpms: the speed at which the motor should turn in rotations per minute - a positive number (long)
Returns None 无返回值
step(steps) 步数执行
Description
Turns the motor a specific number of steps, at a speed determined by the most recent call to setSpeed(). This function is blocking; that is, it will wait until the motor has finished moving to pass control to the next line in your sketch. For example, if you set the speed to, say, 1 RPM and called step(100) on a 100-step motor, this function would take a full minute to run. For better control, keep the speed high and only go a few steps with each call to step().
Parameters
steps: the number of steps to turn the motor - positive to turn one direction, negative to turn the other (int)
Returns None
举例
例1 Stepper Motor Knob 用电位器控制步进电机步数
Control a highly accurate stepper motor using a potentiometer
Stepper motors, due to their unique design, can be controlled to a high degree of accuracy without any feedback mechanisms. The shaft of a stepper, mounted with a series of magnets, is controlled by a series of electromagnetic coils that are charged positively and negatively in a specific sequence, precisely moving it forward or backward in small "steps".
There are two types of steppers, Unipolars and Bipolars, and it is very important to know which type you are working with. For each of the motors, there is a different circuit. The example code will control both kinds of motors. See the unipolar and bipolar motor schematics for information on how to wire up your motor.
In this example, a potentiometer (or other sensor) on analog input 0 is used to control the movement of a stepper motor using the Arduino Stepper Library. The stepper is controlled by with digital pins 8, 9, 10, and 11 for either unipolar or bipolar motors.
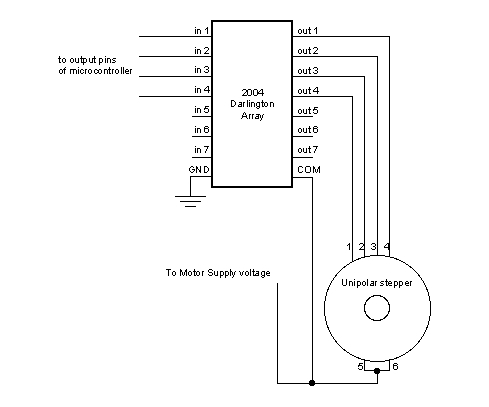
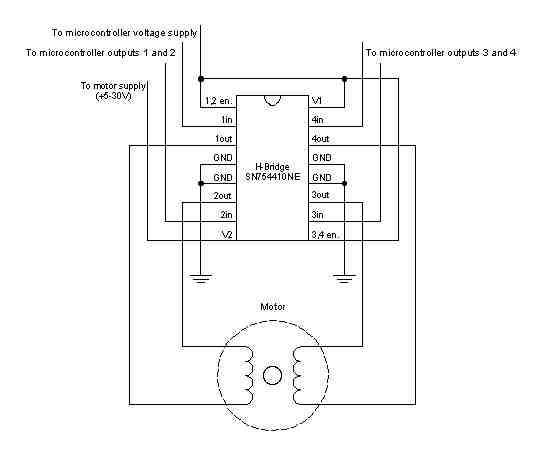
The Arduino or Genuino board will connect to a U2004 Darlington Array if you're using a unipolar stepper or a SN754410NE H-Bridge if you have a bipolar motor.
For more information about the differences of the two types, please take a look at Tom Igoe's page on stepper motors.
Hardware Required 硬件
Arduino or Genuino Board
10k ohm potentiometer
stepper motor
U2004 Darlington Array (if using a unipolar stepper)
SN754410ne H-Bridge (if using a bipolar stepper)
power supply appropriate for your particular stepper
hook-up wires
breadboard
Circuits 电路
Below you'll find circuits for both unipolar and bipolar steppers. In either case, it is best to power your stepper motors from an external supply, as they draw too much to be powered directly from your Arduino board.
In both circuits, connect a 10k pot to power and ground, with it's wiper outputting to analog pin 0.
Note: Both circuits below are four wire configurations. Two wire configurations will not work with the code provided.
Unipolar Stepper Circuit and schematic:
Bipolar Stepper Circuit and schematic:
Code 程序
For both unipolar and bipolar steppers
1 /* 2 * MotorKnob 3 ** A stepper motor follows the turns of a potentiometer (or other sensor) on analog input 0. 4 ** http://www.arduino.cc/en/Reference/Stepper 5 * This example code is in the public domain. 6 */ 7 8 #include <Stepper.h> 9 #define STEPS 100 // change this to the number of steps on your motor 10 // create an instance of the stepper class, specifying 11 // the number of steps of the motor and the pins it's attached to 12 Stepper stepper(STEPS, 8, 9, 10, 11); 13 int previous = 0; // the previous reading from the analog input 14 15 void setup() 16 { 17 stepper.setSpeed(30); // set the speed of the motor to 30 RPMs 18 } 19 20 void loop() 21 { 22 int val = analogRead(0); // get the sensor value 23 // move a number of steps equal to the change in the sensor reading 24 stepper.step(val - previous); // remember the previous value of the sensor 25 previous = val; 26 }
例2 Stepper Speed Control 用电位器控制步进电机速度
Control the stepping speed with a potentiometer
硬件与电路部分,与上例同
Code 程序
For both unipolar and bipolar steppers
1 /* 2 Stepper Motor Control - speed control 3 This program drives a unipolar or bipolar stepper motor. 4 The motor is attached to digital pins 8 - 11 of the Arduino. 5 A potentiometer is connected to analog input 0. 6 The motor will rotate in a clockwise direction. The higher the potentiometer value,the faster the motor speed. Because setSpeed() sets the delay between steps,you may notice the motor is less responsive to changes in the sensor value at low speeds. 7 8 Created 30 Nov. 2009,Modified 28 Oct 2010,by Tom Igoe 9 */ 10 11 #include <Stepper.h> 12 const int stepsPerRevolution = 200; 13 // change this to fit the number of steps per revolution 14 // for your motor initialize the stepper library on pins 8 through 11: 15 Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); 16 int stepCount = 0; // number of steps the motor has taken 17 18 void setup() 19 { 20 // nothing to do inside the setup 21 } 22 23 void loop() 24 { 25 int sensorReading = analogRead(A0); // read the sensor value: 26 int motorSpeed = map(sensorReading, 0, 1023, 0, 100); 27 // map it to a range from 0 to 100 28 if (motorSpeed > 0) // set the motor speed: 29 { 30 myStepper.setSpeed(motorSpeed); 31 myStepper.step(stepsPerRevolution / 100); // step 1/100 of a revolution: 32 } 33 }
例3 Stepper One Revolution 正转一圈反转一圈
Turn the shaft one revolution clockwise and one counterclockwise.
硬件与电路部分,与上例同
Code 程序
For both unipolar and bipolar steppers
1 /* 2 Stepper Motor Control - one revolution 3 This program drives a unipolar or bipolar stepper motor. 4 The motor is attached to digital pins 8 - 11 of the Arduino. 5 The motor should revolve one revolution in one direction, then one revolution in the other direction. 6 7 Created 11 Mar. 2007,Modified 30 Nov. 2009,by Tom Igoe 8 */ 9 #include <Stepper.h> 10 const int stepsPerRevolution = 200; 11 // change this to fit the number of steps per revolution 12 // for your motor initialize the stepper library on pins 8 through 11: 13 Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); 14 15 void setup() 16 { 17 myStepper.setSpeed(60); // set the speed at 60 rpm: 18 Serial.begin(9600); // initialize the serial port: 19 } 20 21 void loop() 22 { 23 Serial.println("clockwise"); // step one revolution in one direction: 24 myStepper.step(stepsPerRevolution); 25 delay(500); 26 Serial.println("counterclockwise"); // step one revolution in the other direction: 27 myStepper.step(-stepsPerRevolution); 28 delay(500); 29 }
例4 One step at a time 一次只走一步
Turn the shaft step by step to check the proper wiring of the motor.
硬件与电路部分,与上例同
Code 程序
For both unipolar and bipolar steppers
1 /* 2 Stepper Motor Control - one step at a time 3 This program drives a unipolar or bipolar stepper motor. 4 The motor is attached to digital pins 8 - 11 of the Arduino. 5 The motor will step one step at a time, very slowly. You can use this to test that you've got the four wires of your stepper wired to the correct pins. If wired correctly, all steps should be in the same direction. 6 Use this also to count the number of steps per revolution of your motor,if you don't know it. Then plug that number into the one Revolution example to see if you got it right. 7 8 Created 30 Nov. 2009,by Tom Igoe 9 */ 10 11 #include <Stepper.h> 12 const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution 13 // for your motor initialize the stepper library on pins 8 through 11: 14 Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); 15 int stepCount = 0; // number of steps the motor has taken 16 17 void setup() 18 { 19 Serial.begin(9600); // initialize the serial port: 20 } 21 22 void loop() 23 { 24 myStepper.step(1); // step one step: 25 Serial.print("steps:"); 26 Serial.println(stepCount); 27 stepCount++; 28 delay(500); 29 }
