搜索学习笔记
搜索
重要性
搜索是一个很好锻炼代码能力的算法,学好搜索,能很好的理解dfs、bfs等,有利于别的算法(图论即与树相关的问题)的实现
关键
明确当前给你的状态,你需要什么才能往下搜
明确操作是什么
事先思考怎么搜合适,即怎么搜会更快,不要碰到题就开始搜,剪枝也最好在写题前写好想好,剪枝放在一起放在最前面(方便检查修改)
状态:指当前所面临的问题的信息,如当前的位置等信息
转移:指从一个状态到另一状态的一种决策
我们从问题中寻找状态与转移方法!
实质
一棵树或图
根为其实节点\(S\)
某些满足终止条件的叶子为终止节点\(T\)
要求一条满足条件的路径\(S->T\),或者找到\(T\)
思考顺序
- 从题目确定状态,目标
- 从题目确定决策,即每一步做什么
- 列出基本的框架,思考状态、决策能否简化
- 剪枝,最优化,可行性
可行性剪枝:判断当前位置能否到T
最优性剪枝:若\(f(P) + exp(P) > Ans\),则回溯
\(P\)为当前状态,\(Ans\)为已知最优解
\(f(P)\)为当前代价,\(exp(P)\)为到\(T\)期望最小代价
若\(exp(P)\)难以计算,设为\(0\)
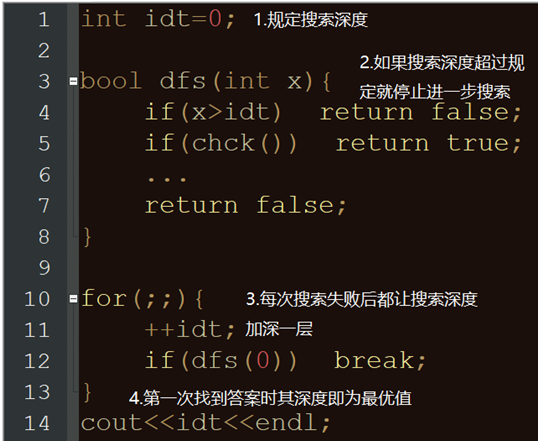
迭代加深搜索
搜索前设立一个 \(Limit\),假设答案不会超过\(Limit\)
若 \(f (P) + exp(P) > Limit\) ,则回溯
搜索失败则加大\(Limit\)
本质上是深搜和广搜的互补
深搜对于一些答案很浅的问题有时候效率很低
广搜则需要大量的空间,以及难以剪枝
迭代加深搜索则兼具两者的优点
记忆化搜索
我们一般写的动态规划是bfs模式的,即一个点从与它相邻的点转移过来
如果用深搜写动态规划,就可以说是记忆化
基本思路:
对于每个状态,存储该状态返回信息
以后再到该状态,直接调用存储信息即可
记忆化搜索是另一种动态规划,按划分应该分在动态规划里面,即它的复杂度是确定的
但其优点是很容易想到,思考难度较低,本质上是搜索再加上几行记忆化即可
先考虑搜索怎么搜,再加上记忆化
启发式搜索
事情开始逐渐不对起来。。
令\(G(P) = f (P) + exp(P)\) 作为状态P的启发函数
\(exp\) 为到达终止状态期望需要花费的代价
找到最优解即找到一个启发式函数值最小的终止状态
这东西我就没见有人用过
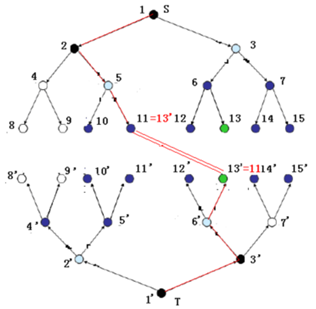
折半搜索
如果已知起点和终点,可以考虑从起点和终点一起搜,这样可以把指数上的\(n\) 除以\(2\)
主要思想:
两个人分别从\(A\)地和\(B\)地出发,向对方出发点走去
当他们都走了\(L / 2\)米时在“中间”相遇
找到了长度为\(L\)的路径
双向BFS
从起始状态和目标状态同步BFS,直至交汇。
理论上可以将访问到的状态数开根号
优化方法
一般先考虑消耗较大的决策(类似于先贪心,利用最优性剪枝来加快搜索速度)
如果问题可以分为多个互不相同的子问题,先考虑状态量少的子问题
如果搜索的状态与数值排列的顺序无关,可以考虑把数值排序,在有HASH判重的情况下,这样一般可以再减少一个阶乘的复杂度
本文来自博客园,作者:北烛青澜,转载请注明原文链接:https://www.cnblogs.com/Multitree/p/16758494.html
The heart is higher than the sky, and life is thinner than paper.
 浙公网安备 33010602011771号
浙公网安备 33010602011771号