激光雷达
激光雷达分类
三角法:近距离测距精度较高(原理相似三角形) 抗干扰能力较差 适用室内
TOF法:
脉冲型TOF(DTOF+ITOF) 连续型FMCW(通过发射波的相干性计算距离,测量速度慢,精度高)
TOF激光雷达:将光均匀打到周围,方法:机械式、MEMS的微震镜、光学相位阵列OPA、FlshLidar(将所有光同一时间打出去,应用在车上)
激光雷达用途:
车载、无人机、水质调查、地图构建、建筑物3d结构搭建
激光雷达安装、标定、同步:
硬件平台:(例子:速腾聚创)RS-Function
应用案例及选型:LiDAR在智能驾驶中的应用案例:waymo、Renesas、Ford……
多激光雷达数据融合:耦合
多传感器融合:GPS、RTK、IMU融合得到位姿、速度、加速度
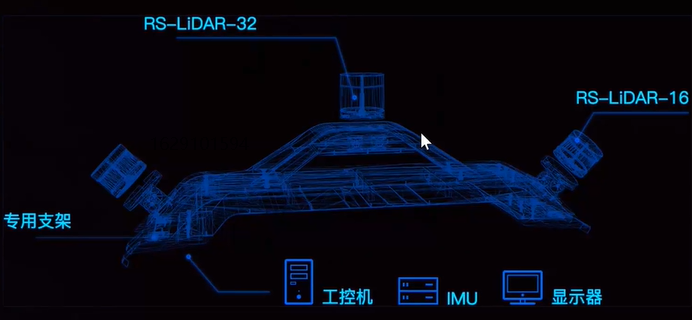
激光雷达系统方案:
硬件:RS-Fusion-P3车载方案:RS-LiDar-16主雷达,两个PS-LiDar-32B辅式雷达+GPS及惯导设备+IPC工控机+激光雷达安装支架+显示器+交换机+网线+多雷达模拟时间同步板
激光雷达参数:激光雷达线束、精度、测量距离、分辨率(垂直角分辨率+水平角分辨率)
多雷达模拟时间同步板:
时间同步,保证多个雷达的时间处于同一时间计时标准(不进行时间同步时,每个雷达以启动时刻计时,使用自身内部独立的计时系统)
外部时间源:GPS或网络时间源
时间输入:GPS通过UART接入雷达,发送GPRMC消息;PPS通过IO接入雷达,发送1PPS脉冲信号
网络时间通过以太网UDP指令发送时间,进行同步
多传感器标定:
空间同步,保证所有的雷达数据转换到一个统一的坐标系下
统一坐标系:选择位置最核心的一个雷达的坐标系作为雷达耦合的统一坐标系
空间位置标定:平移量(x,y,z) 旋转量(roll, pitch, yaw)----无法直接测量
软件:
障碍物检测:通过bounding box来添加或者多边形来描述
障碍物分类识别:在检测基础上得到类别信息
运动物体追踪:估计物体运动状态
可行驶区域检测:在场景中分割出可以行驶的区域,相关任务:路沿检测、车道线检测、地面检测、路面检测
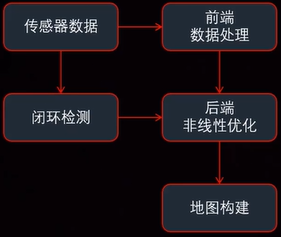
SLAM建图:精度高满足定位算法厘米级要求;
大场景稳定性高,精度不随地图增大而降低;
人工干预少,重复精度高;
框架:
重定位:
场景1:小型移动机器人
特点:经常发生灵活机动、角速度较大、视角比较低
场景2:开放城市道路
特点:速度较快、会出现被大车包围的情况
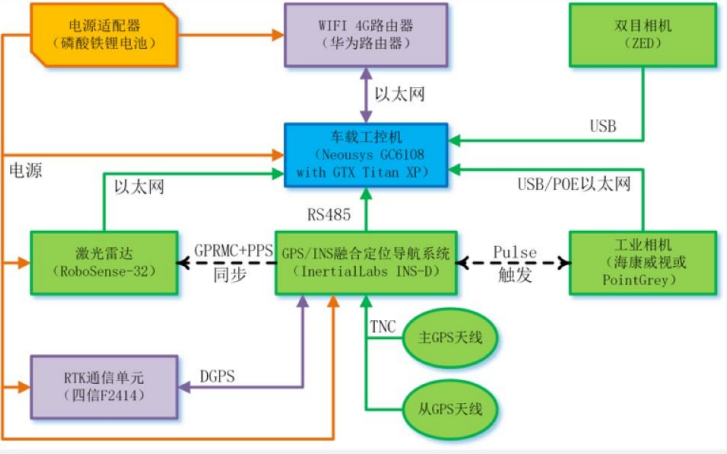
激光雷达数据采集
激光雷达硬件平台:

注:GPRMC:
双天线优势:
激光雷达ROS驱动与采集:
通过节点通信(TCP)
有什么不对的,可不可以在评论区告诉我,好不好~~~

 浙公网安备 33010602011771号
浙公网安备 33010602011771号