点云数据获取——获得点云数据并保存成pcd
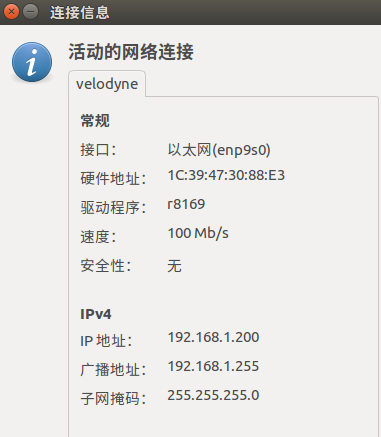
1.连接到激光雷达:
通过网线连接电脑和velodyne,然后在网络处选择建立的velodyne网络(上一篇)。
2.在ros下,运行velodyne
roslaunch velodyne_pointcloud VLP16_points.launch
3.将/velodyne_points的topic存入bag
rosbag record -O out /velodyne_points
4.在github上下载pcl_ros源码包,并编译
cd src
git clone https://github.com/ros-perception/perception_pcl.git
cd ..
catkin_make
5.使用该包相应功能,将bag转换成pcd文件
rosrun pcl_ros bag_to_pcd input.bag /velodyne_points pcd
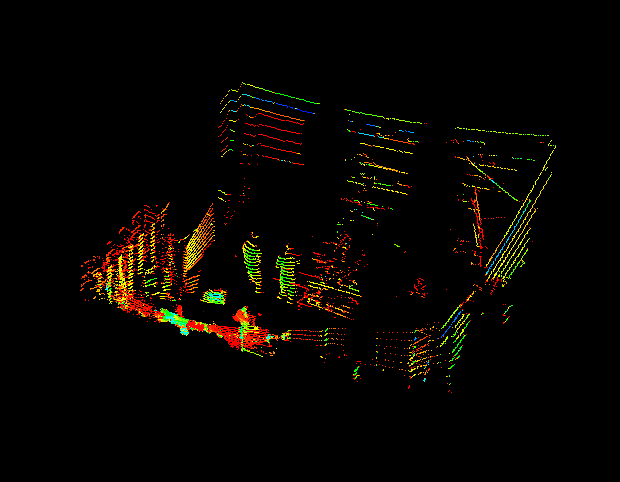
显示相应的pcd图像,可以看到