[POI2004]WYS 题解 扫描线算法
![[POI2004]WYS 题解 扫描线算法](https://img2023.cnblogs.com/blog/2914710/202301/2914710-20230110173640122-42907331.png) 扫描线
扫描线
[POI2004]WYS 题解
奇怪的题目名。
题目描述
给 \(n\) 个互不相交的多边形,这些多边形的边均平行或垂直于坐标轴。定义多边形 \(i\) 的深度 \(d_i\) 为 \(\max\{d_j\}+1\),其中多边形 \(j\) 包含多边形 \(i\)。特别的,若一个多边形不被任何多边形包含,则其深度为 \(1\)。求深度最大的多边形的深度。\(n \leqslant 40000\)。
思路
扫描线 算法。
假装有一条线,平行于 y 轴,从左往右扫描整个图形,那么整个图形就会被分割为几个长条。
长条内部同一 y 坐标的部分深度一定相同,这样只需要知道所有长条内部区间的深度即可解决这个问题。
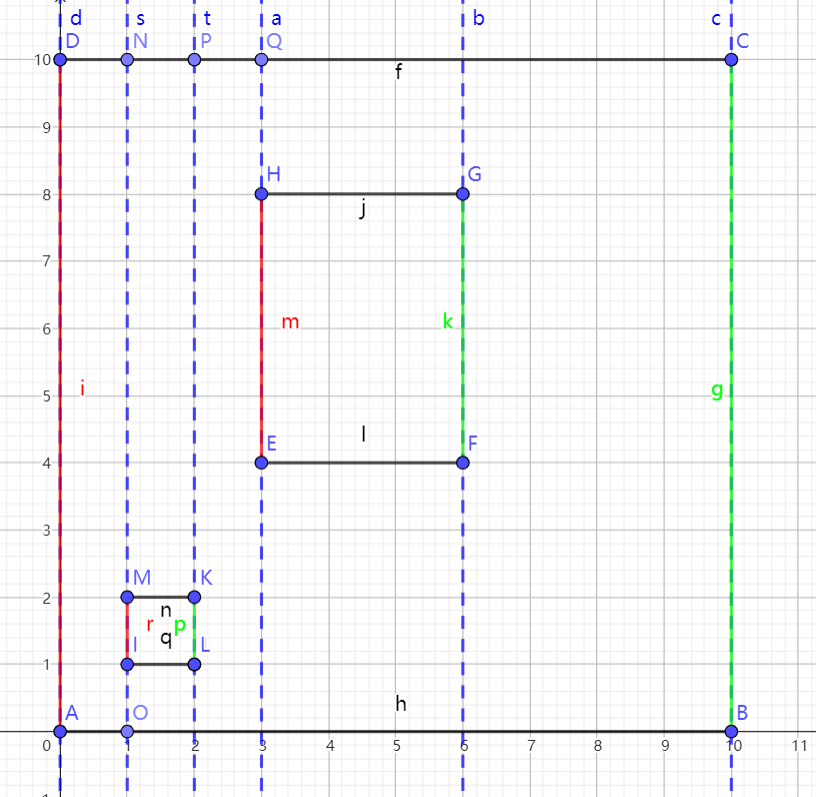
可以发现,只要这条扫描线经过了一个多边形的左边界(即红色的线段),那么这条线段就会对它所代表的 y 坐标区间产生 \(1\) 个深度贡献,代表这个区间新被一个多边形所覆盖。
对应地,当扫描线经过多边形的右边界(即绿色的线段),这条线段所代表的 y 坐标区间会产生 \(-1\) 的深度贡献,代表这个区间不再被一个多边形所覆盖。
其中多边形左边界的定义是:在这条线段左侧都不属于此多边形而线段右侧都属于此多边形。右边界同理。
我们可以使用 线段树 维护这个区间深度信息。
另外,由于题目数据范围比较大,需要离 离散化。
代码
// Problem: P4633 [POI2004]WYS
// URL: https://www.luogu.com.cn/problem/P4633
// Author: Moyou
// Copyright (c) 2022 Moyou All rights reserved.
// Date: 2023-01-10 11:16:33
#include <algorithm>
#include <iostream>
#define INF 0x3f3f3f3f
using namespace std;
const int N = 1e4 + 10, M = 4e5 + 10; // 空间不要钱
int x[N];
struct edge
{
int x, l, r;
int pl;
} e[M];
int b[M], nn, n;
int idx;
int ans = -INF;
int dat[M], tag[M];
void down(int k, int l, int r) // 懒标记下沉
{
tag[k << 1] += tag[k], tag[k << 1 | 1] += tag[k];
dat[k << 1] += tag[k], dat[k << 1 | 1] += tag[k];
tag[k] = 0;
}
void update(int a, int b, int k, int l, int r, int x) // 更新区间深度信息
{
if (b <= l || a >= r)
return;
if (a <= l && r <= b)
{
tag[k] += x;
dat[k] += x;
return;
}
if (tag[k])
down(k, l, r);
update(a, b, k << 1, l, l + r >> 1, x);
update(a, b, k << 1 | 1, l + r >> 1, r, x);
dat[k] = min(dat[k << 1], dat[k << 1 | 1]);
}
int query(int a, int b, int k, int l, int r) // 查询深度信息
{
if (b <= l || a >= r)
return INF;
if (a <= l && r <= b)
return dat[k];
if (tag[k])
down(k, l, r);
return min(query(a, b, k * 2, l, l + r >> 1), query(a, b, k * 2 + 1, l + r >> 1, r));
}
int main()
{
int tmp;
cin >> tmp;
for (int i = 1; i <= tmp; i++) // 读入多边形
{
int k;
cin >> k;
for (int j = 1; j <= k; j++)
cin >> x[j], b[++n] = x[j];
for (int j = 1; j <= k - 2; j++)
if (j % 2 == 0) // 题目中说了,边是逆时针给出的,因此向下的边一定是右边界,左边界反之
{
if (x[j + 2] > x[j]) // 一条往下的边,是右边界
e[++idx] = {x[j + 1], x[j], x[j + 2], -1};
else // 一条往上的边,是左边界
e[++idx] = {x[j + 1], x[j + 2], x[j], 1};
}
if (x[k] > x[2]) // 一条往上的边,是左边界
e[++idx] = {x[1], x[2], x[k], 1};
else // 一条往下的边,是右边界
e[++idx] = {x[1], x[k], x[2], -1};
}
sort(b + 1, b + n + 1); // 离散化
sort(e + 1, e + idx + 1, [](edge a, edge b) { return a.x < b.x; }); // 确定扫描的顺序
n = unique(b + 1, b + n + 1) - b;
while ((1 << nn) <= n)
nn++;
nn = 1 << nn; // 线段树有2^k的节点的话比较方便
for (int i = 1; i <= idx; i++)
{
int l = lower_bound(b + 1, b + n + 1, e[i].l) - b;
int r = lower_bound(b + 1, b + n + 1, e[i].r) - b;
update(l, r + 1, 1, 1, nn + 1, e[i].pl);
ans = max(ans, query(l, r + 1, 1, 1, nn + 1)); // 更新答案
}
cout << ans << endl;
return 0;
}

