雷达气象学(0)——雷达的基本知识
0.1 天气雷达的工作原理
本篇是雷达气象学系列的第一篇文章,我们先来说说天气雷达的工作原理。
0.1.1 雷达的工作原理
雷达的工作原理其实很容易理解:天气雷达定向地向空中发射电磁波,然后接收被气象目标散射回来的电磁波,并在荧光屏(或计算机系统)上显示出来,从而确定气象目标物的位置和特性。请先记住这句话:雷达探测大气的基础就是电磁波的散射作用,雷达就是通过散射而工作的。散射的相关理论会在后面文章提到。
雷达电磁波探测的气象目标即为降水粒子,这些粒子除了对电磁波有散射作用外,还有衰减作用,这使得电磁波传播的距离越远,返回的回波强度就越弱。而且,降水粒子尺寸越大,对电磁波的衰减作用就越严重。因此像冰雹这种大尺寸粒子,衰减作用十分严重。电磁波的衰减会造成回波图像的失真和部分缺失,对于电磁波的衰减也会在后面文章提到。
解决上述问题的其中一个办法是使用波长较大的电磁波,因为降水粒子对波长较大的电磁波的衰减作用更弱。目前我国新一代天气雷达系统中,最常用的几种波段如下表所示。我们可以看到,在多强对流地区,尤其是雷暴和冰雹天气多发的地区,一般都是使用波长较大的雷达;另外还可以看到,雷达除了能探测降水以外,还能探测云和风。
| 波段 | 波长 | 探测的气象目标 | 备注 |
|---|---|---|---|
| K波段 | 0.75~2.4cm | 各种不产生降水的云 | 最常用的是Ka波段 |
| X波段 | 2.4~3.75cm | 探测降水 | 作为新一代天气雷达网的补充 |
| C波段 | 3.75~7.5cm | 探测降水 | 一般安装在西部地区和内陆地区 |
| S波段 | 7.5~15cm | 探测降水,最适用于探测暴雨和冰雹 | 一般安装在中、东部多雨地区和沿海地区 |
| L波段 | 15~30cm | 探测晴空大气的风场 | 用于风廓线雷达 |
0.1.2 雷达的测距原理
除此之外,天气雷达还可用于测距,其测距原理也很容易理解:雷达根据从开始发射电磁波到接收到目标物回波的时间间隔,来测定目标与雷达之间的距离。为了测定目标物的距离,一般雷达不是连续发射电磁波,而是每隔一定的时间作一次短时间的发射。这种短时间发射的无线电波叫脉冲波或简称无线电脉冲。
0.1.3 雷达的测角原理
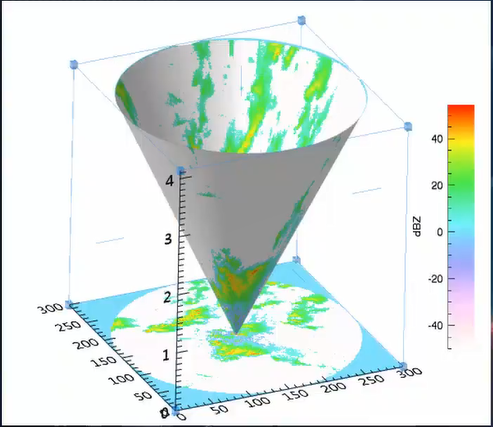
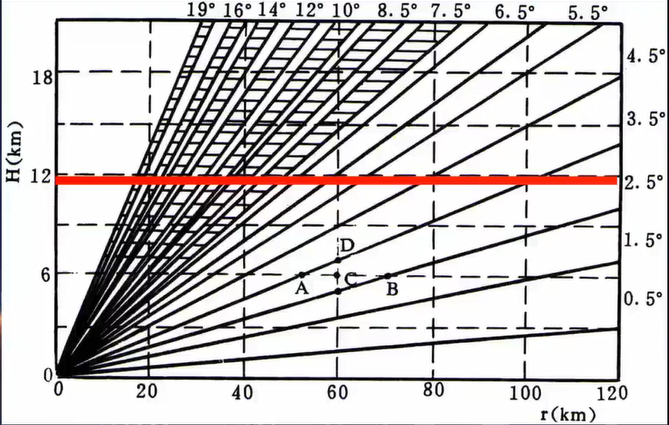
不过,雷达并不是像大家想象得那么简单,它并不能在同一时刻向所有方向都发射电磁波,也不能向所有空间都发射电磁波。在同一时刻,雷达只能向着一个特定方向、以一个特定角度发射电磁波,这种雷达被称为机械扫描雷达。也正因为如此,我们所常见的单站雷达图上的回波,并不都在同一个高度面上,这是因为雷达以一个特定的仰角扫描完一圈(即 360°),扫描一圈所形成的平面是一个锥面,如下图所示。因此,大家下次再看到这种回波图,就要想到这实际上是一个锥面上的回波,而并不是在同一高度上。
在发射目标前,雷达系统需要给出目标的方位角(即特定方向)和仰角(即高度)。那么,如何确定这个角度呢?雷达测量目标的方位角和仰角是依靠雷达天线的定向作用去完成的。定向天线的特点是它辐射的电磁波能量只集中在某一个方向上,但其他的方向上没有或只有很少的发射能量。
要精确地测出目标的方位角和仰角,就要求发射天线和接收天线同时指向同一目标。因此,在雷达工作过程中,要求接收天线必须与发射天线严格地同步运行,所以天线的传动系统十分复杂。在现代的脉冲雷达系统中,实际上是用同一个定向去完成发射和接收的双重任务的。
如上所述,一般的雷达波束扫描是靠雷达天线的转动实现的,被称为机械扫描雷达。传统天气雷达一般是机械扫描多普勒天气雷达,这种雷达扫描完一圈所需的时间较长,那么有没有更快扫描方式的雷达?有!就是相控阵雷达。它是用电的方式控制雷达波束的指向变动来进行扫描发现目标的,这种方式被称为电扫描。随着雷达技术的发展,双偏振天气雷达和相控阵天气雷达也逐渐被应用在天气观测领域。
0.2 天气雷达的种类
天气雷达有许多种类,如下表所示。
| 天气雷达 | 简介 |
|---|---|
| 脉冲多普勒天气雷达 | 目前最常见的天气雷达,也是本系列文章介绍的重点,我们经常使用的回波强度图和径向速度图都是由该雷达所绘制的 |
| 双偏振天气雷达 | 传统多普勒雷达是水平偏振波,无法识别降水类型;而该雷达采用水平和垂直偏振波,实现对降水进行分类与识别 |
| 双波长天气雷达 | 可用于探测被测降水粒子的大小 |
| 多参数天气雷达 | 提供云及降水物的尺寸、相态、类型等信息 |
| 多基地天气雷达 | 能测出诸如风场的三维矢量、降雨粒子的垂直速度等信息 |
| 机载天气雷达 | 雷达分辨力、精度、灵敏度好 |
| 相控阵天气雷达 | 优点很多,是我国新一代天气雷达的发展发向 |
0.3 我国新一代天气雷达系统简介
经常关注气象(尤其是喜欢关注强对流天气)的朋友,可能听说过很多次这个词了——“新一代天气雷达系统”,那么它究竟是什么呢?让我们从我国的天气雷达历史发展说起吧。
0.3.1 我国天气雷达发展简史
我国天气雷达的发展历史如下:
- 常规天气雷达阶段:
- 上世纪 50 年代:雷达技术还未应用到我国气象领域。
- 1958 年:第一次引进英国和日本雷达用于沿海台风探测和科学研究。
- 上世纪 60 年代末:自行研制 711X 型雷达。
- 数字化天气雷达阶段:
- 上世纪 70 年代:研制和组织生产 712、713 型和 714 型雷达。
- 上世纪 80 年代:自行生产出具有数字处理系统的 714S 波段雷达,并引进多普勒雷达。
- 多普勒天气雷达阶段:
- 上世纪 90 年代:已生产出 714CD、714SD 型脉间相干雷达。
- 上世纪 90 年代中期:开始布局新一代天气雷达系统。
- 1999 年:对 WSR-88D 进行改造,第一部先进的 S 波段全相干脉冲多普勒雷达 。CINRAD/CC 3824 型。
- 本世纪 00 年代中期:完成新一代雷达站网建设。
0.3.2 我国新一代天气雷达的型号命名
我国从上世纪 90 年代后期开始布网建设新一代多普勒天气雷达(China new generation Doppler weather radar, CINRAD)。截至 2016 年底已经完成了全国 233 部新一代天气雷达建设。已建成的新一代多普勒天气雷达有两类八种型号:
- S 波段雷达:主要分布在沿海地区及中、东部主要降雨流域。
- CINRAD/SA(WSR-98D):S 波段增强型,为中美合资生产(北京敏视达)。该型号雷达来源于美国下一代天气雷达 NEXRAD(WSR-88D)的型号技术升级,它继承了美国 88D 雷达结构和设计理念。
- CINRAD/SB:S 波段标准型,为中美合资生产(北京敏视达)。
- CINRAD/SC(714SDN):国内独立研制(成都 784 厂)。
- C 波段雷达:主要分布在内陆地区。
- CINRAD/CA:C 波段增强型,为中美合资生产(北京敏视达)。
- CINRAD/CB:C 波段标准型,为中美合资生产(北京敏视达)。
- CINRAD/CC(3830CD):国内独立研制(合肥 38 所)。
- CINRAD/CD(714CDN):国内独立研制(成都 784 厂)。
- CINRAD/CCJ(3830CDJ):国内独立研制(合肥 38 所)。
天气雷达网的建设推动了我国气象业务软件的自主研发及相关行业的发展,其中新一代天气雷达建设业务软件系统(ROSE1.0)是我国 CINRAD 业务雷达的通用软件平台,能够提升雷达数据质量,完善雷达产品算法,所提供产品能够更好地服务于天气分析。
灾害天气短时临近预报预警系统(SWAN1.6)能生成雷达拼图产品,并能将雷达观测数据与其它观测数据融合,计算山洪沟、中小河流面雨量及地质隐患点雨量,生成风险等级产品,为临近预报业务提供了技术支撑。
0.3.3 补充:美国天气雷达的发展简史
(来源于2004年6月22日《中国气象报》 作者:贾朋群 胡英)
美国最早的雷达数据网在上个世纪 50 年代建立。1954 年,CPS-9 雷达(X 波段,3cm 波长)在美国空军投入使用,这是美国最早专门用于气象监测的雷达。之后,换代为美国第一代气象业务雷达(WSR-57D 雷达,设计为 S 波段,10cm 波长)。美国目前的国家天气雷达系统的建设,即由 WSR-88D 雷达组成的美国下一代雷达网(NEXRAD),是从 1988 年到 2000 年美国天气局实施的气象现代化项目中的重要组成部分,它覆盖了美国大陆国土以及部分沿海海域和岛屿。2000 年美国下一代雷达网项目全面完成时,包括了 158 部业务雷达,雷达间的最大距离为 250 海里,美国下一代雷达网的设计服务期约 20 年。
0.4 天气雷达的结构和功能
接下来再来介绍一下天气雷达的基本结构和工作方式,其结构如下图所示:
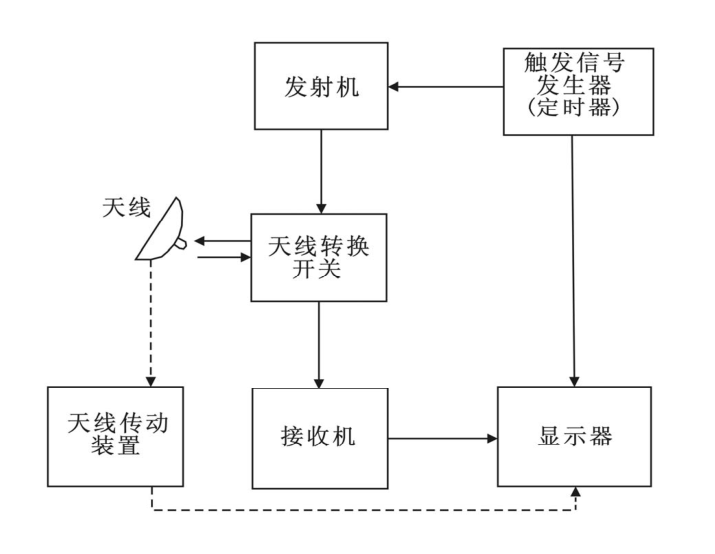
现代雷达系统要比上面的复杂得多,主要由三个子系统组成:
- 雷达数据采集子系统(RDA,Radar Data Acquisition):用户所使用的雷达数据的采集单元,其结构与上图所展示的差不多。
- 雷达产品生成子系统(RPG,Radar Product Generation):控制整个雷达系统的指令中心。
- 主用户终端子系统(PUP,Principal User Processor):主用户终端,用来接收 RPG 生成的气象产品数据和状态信息,并以图形方式提供给预报人员作天气分析和预报使用。
接下来我们将关注 RDA 的结构以及功能。
0.4.1 发射机
在定时器的控制下,发射机每隔一段时间产生一个高频脉冲,通过天线发射出去。
0.4.2 雷达天线
雷达天线的作用是定向地辐射高频脉冲波和接收来自该方向的回波。气象上使用的雷达天线
一般由两部分组成:
- 天线辐射喇叭:把发射机产生的高频脉冲能量向外辐射。
- 天线反射器:把来自辐射喇叭的脉冲电波,以很小的张角高度定向地向外反射。
0.4.3 天线传动装置
天线传动装置主要包括两个部分,一部分是天线的转动系统,一部分是同步系统。
天线转动系统的作用是:
- 使天线绕垂直轴转动(调整方位角),以便探测平面上的降水分布,或漏斗面上降水、云的分布;
- 使天线在某一方位上作上下俯仰(调整仰角),以便探测云和降水的垂直结构和演变。
天线同步系统的作用是:使阴极射线管上不同时刻的扫描基线的方位、仰角和相应时间天线所指的方位、仰角一致(即同步),从而使雷达荧光屏上出现的目标标志(用亮点或垂直偏移表示)的方位、仰角就是目标相对于雷达的实际方位、仰角。
天线的仰角由雷达操作员来负责调节,但他们并不能手动调节天线仰角,天线仰角只能通过天线的扫描方式、体扫模式(Volume Cover Pattern, VCP)和工作模式设置,这三种模式都是预设好的,操作员只能从中选择一种组合来调节天线仰角。下面来具体解释这三种模式,为简化起见,我们以类似于美国 WSR-88D 的 CINRAD-SA 为例。
0.4.3.1 扫描方式
扫描方式指雷达在一个体积扫描(Volume Scan)中使用多少个仰角和时间。CINRAD-SA 的扫描方式如下:
- 天线首先从最低仰角发出几分之一秒的脉冲,然后接收回波信号。
- 接着继续在最低仰角旋转到另一个角度(方位角)并重复以上步骤。
- 当雷达完成一周 360° 扫描,天线抬升至下一个高度的仰角继续上述过程。
CINRAD-SA 使用三种扫描方式:
- 14/5:即 5 分钟完成 14 个不同仰角上的扫描;
- 9/6:即 6 分钟完成 9 个不同仰角上的扫描;
- 5/10:即 10 分钟完成 5 个不同仰角上的扫描。
在新一代天气雷达中,为避免过多的地物杂波影响,扫描的最低仰角从 0.5° 开始而非 0.0°;为避免垂直气流的影响,最高仰角到 19.5°。
那么 CINRAD-SA 具体可以使用哪些仰角呢?这就是下面要说的体扫模式。
0.4.3.2 体扫模式(VCP)
扫描方式确定一次体积扫描中使用多少个仰角,而具体是哪些仰角则由体扫模式来规定。
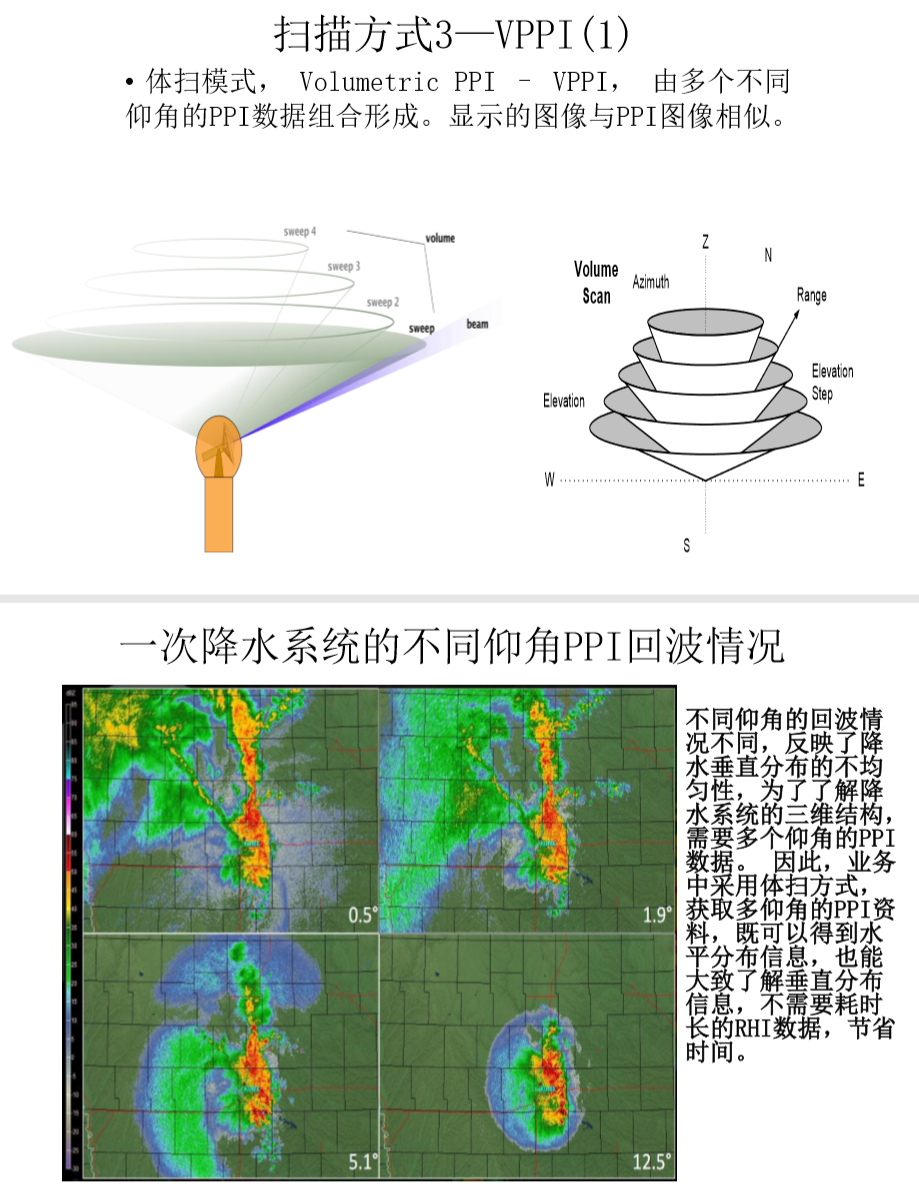
体扫模式(Volume Cover Pattern, VCP)指几个到十几个不同仰角的扫描组合。体扫模式按顺序连续扫描,可得到间隔时间一定,连续不断的体扫资料。
CINRAD/SA 目前定义了 4 个体扫模式:VCP11、VCP21、VCP31 和VCP32,在 WSR-98D 中没有定义 VCP32。四种扫描方式如下:
- VCP11:规定了 5 分钟内对 14 个具体仰角的扫描方式。
- VCP21:规定了 6 分钟内对 9 个具体仰角的扫描方式。
- VCP31:规定了 10 分钟内对 5 个具体仰角的扫描方式。
- VCP32:规定了 10 分钟完成的 5 个具体仰角。与 VCP31 不同之处在于:VCP31 使用长雷达脉冲,VCP32 使用短脉冲。
如下图即为某个体扫模式中,不同仰角组合在一起得到的体扫资料。也就是说,在一次扫描完成之后,我们实际获得的是不同仰角的气象资料。
0.4.3.3 工作模式
CINRAD/SA 使用降水和晴空两种工作模式:
- 降水模式:在降水发生或预计发生的区域使用。此时雷达选择多仰角扫描的 VCP11 或VCP21,相应的扫描方式分别为 14/5 和 9/6。在较近距离(150km 以内)出现强对流天气时,选择 VCP11 更合适。
- 晴空模式:用于没有明显的降水回波的地区,一般只对低仰角进行扫描,体扫模式选择 VCP31,扫描方式为 5/10。
实战:我们以下面的雷达回波强度图为例,解释右边黑色界面的参数。
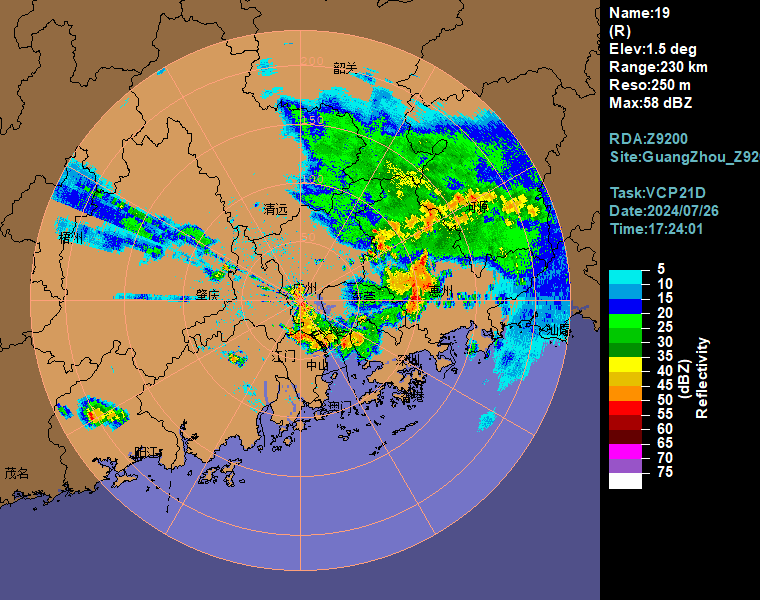
Name:19(R):19 号雷达产品,即反射率因子图。Elev:1.5deg:雷达的探测仰角为 1.5 °。Range:230km:雷达最大探测范围为 250km。可以看到图中有一圈圈的同心圆,每个圆之间为 50km。Reso:250m:雷达的分辨率为 250m。Max:58 dBZ:当前回波强度图上最大的反射率因子为 58dBZ。RDA:Z9200:雷达编号。Task:VCP21D:当前雷达的工作模式为降水模式。
0.4.4 接收机
雷达接收机的作用是将天线接收回来的微弱回波信号放大,并转换成视频信号送往显示器产生回波标志。
0.4.5 显示器
显示器是把雷达探测到的云、雨等目标及其相对于雷达的坐标位置(方位、距离、高度)、回波强度等显示出来的装置。由于需要重点了解的情况不同,天气雷达经常使用的显示器有平面位置显示器(PPI)、距离高度显示器(RHI)、等高平面位置显示器(CAPPI),下面来依次介绍。
0.4.5.1 平面位置显示器(PPI)
平面位置显示器(Plan Position Indicator, PPI)是我们最常见的天气雷达显示器,在 CMA 网站上的单站雷达图就是 PPI。它表示的是扫描平面(锥面)上的回波强度,可用于作降水分析。注意,由于雷达仰角关系,会产生探测盲区,比如近距离低空的雷暴就探测不到,所以在分析 PPI 之前需要留意雷达仰角,以免遗漏降水云团。
0.1.3 节和 0.4.3.3 节中的雷达图均属于 PPI,图像上每一点不仅表示了离测站的距离和方向外,在不同距离上还表示不同高度。
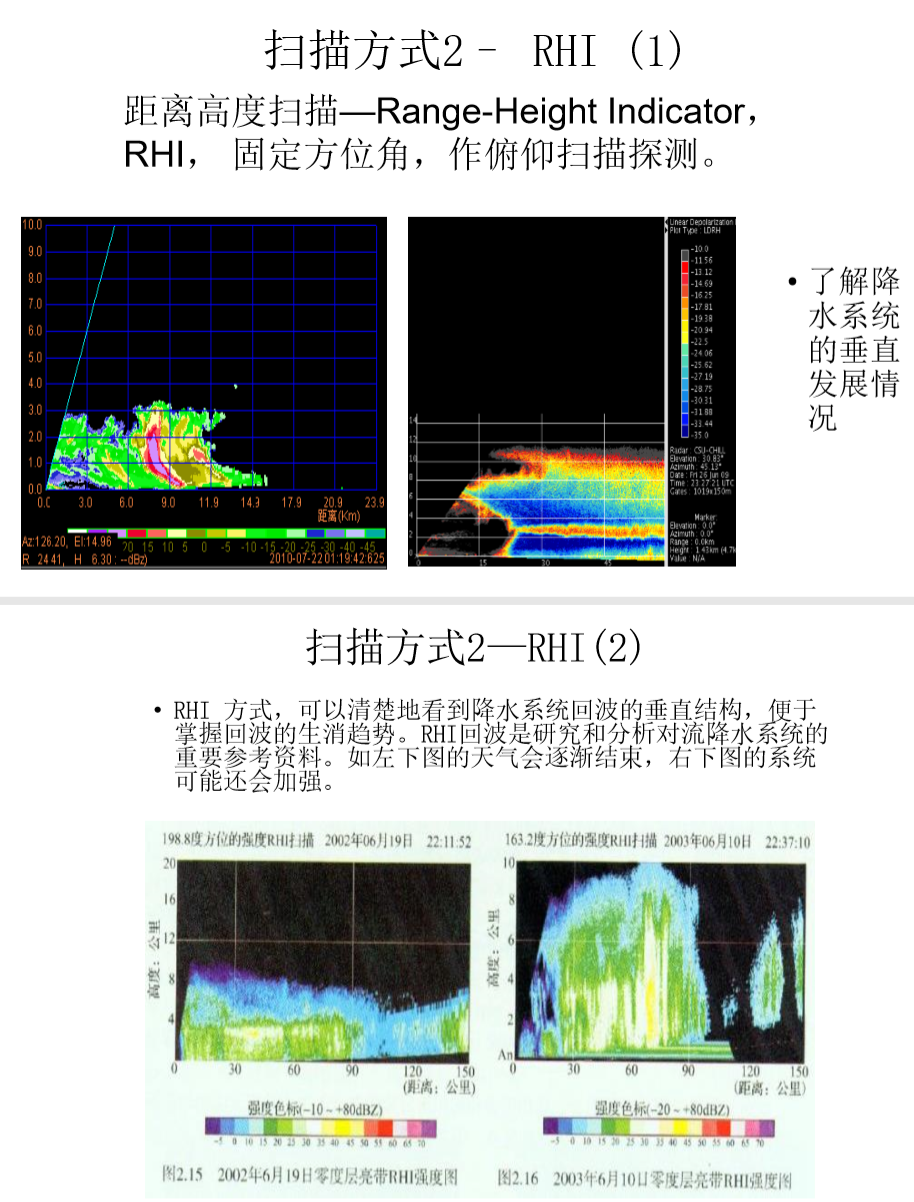
0.4.5.2 距离高度显示器(RHI)
为了了解云、雨的形成和垂直结构情况,在天气雷达上还有一种常用的显示器——距离高度显示器(Rang Height Indicator, RHI),简称高显。在 RHI 中,横坐标表示云、雨目标的斜距,纵坐标是云雨目标的高度。
0.4.5.3 等高平面位置显示器(CAPPI)
PPI 只能在仰角为 0° 才能得到降水分布的平面分布,而当仰角大于 0°时得到却是立体锥面的降水分布。但有时候我们需要了解降水发生的三维情况,于是使用了等高平面位置显示器(Constant Altitude Plan Position Indicator, CAPPI)。它是截取同一高度上的要素组成的图像。
再次提醒,在看雷达图的时候,一定要先看雷达的参数,比如 PPI 会给出仰角参数,CAPPI 会给出高度参数。不同仰角的 PPI 显示的结果是不一样的。
雷达的所有基本知识应该都介绍完了,后面文章将开始雷达的相关理论学习。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号