uCOS-III 学习记录(10)——时间片轮转调度
参考内容:《[野火]uCOS-III内核实现与应用开发实战指南——基于STM32》第 14 章。
0 时间片轮转调度的意义
我们现在实现的 uCOS 内核,包含了就绪列表和时基列表。就绪列表的插入规则与优先级有关,而时基列表的插入规则与时基计数器和延时时间有关。上一篇文章中,已经实现了时基列表的任务调度。但是我们写的内核还有一些缺陷,当不进行任务调度时(注意:任务调度的实质是切换到高优先级的任务去执行),系统只能执行就绪列表下的双向链表头指针对应的任务,那么相同优先级的其他任务就执行不到了。因此,我们希望相同优先级的多个任务都可以执行到,其中一个办法就是每隔一段时间就切换到相同优先级上的任务,这样这些任务都有机会被运行到。
时间片轮转调度用于解决相同优先级下多个任务的运行问题。现在假设 A 优先级下有任务 1、任务 2、任务 3,B 优先级有任务 4 且被阻塞 6 个时间片的长度,所以现在要运行 A 优先级下的任务。
- 如果不实现时间片轮转,那么 A 优先级排在最前面的任务 1 将运行 6 个时间片,即独占了这 6 个时间片。
- 如果实现时间片轮转,那么 A 优先级下的任务可以商量好,大家这样来:任务 1 先运行 2 个时间片,任务 2 再运行 2 个时间片,最后任务 3 也运行 2 个时间片,很公平,大家都被运行了。当然,也不一定平均分配,比如任务 1 先运行 1 个时间片,任务 2 再运行 2 个时间片,最后任务 3 运行 3 个时间片,这样也可以。
相同优先级的任务,谁都可以被运行,这就是时间片轮转调度带来的好处了。现在,我们就来实现这个机制。
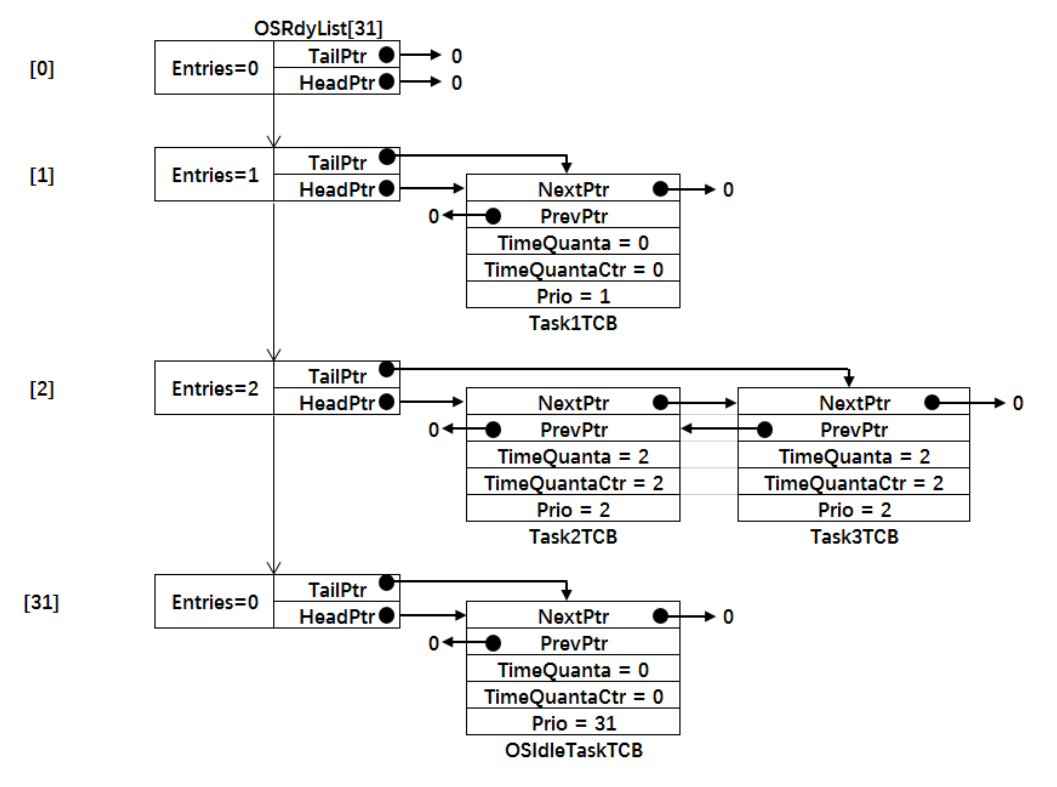
1 修改任务控制块 TCB(os.h)
在实现轮转调度之前,先添加 TCB 的成员,有两个:
- TimeQuanta:用于记录该任务需要多少个时间片,这个值设置好后一般是不动的。
- TimeQuantaCtr:用于时间片计数,表示任务剩余的时间片个数。一旦数到了零,说明该任务已经用完了时间片,需要切换其他任务了。
struct os_tcb{
CPU_STK *StkPtr;
CPU_STK_SIZE StkSize;
OS_PRIO Prio; /* 任务优先级 */
OS_TCB *NextPtr; /* 就绪列表双向链表的下一个指针 */
OS_TCB *PrevPtr; /* 就绪列表双向链表的前一个指针 */
OS_TCB *TickNextPtr; /* 指向链表的下一个 TCB 节点 */
OS_TCB *TickPrevPtr; /* 指向链表的上一个 TCB 节点 */
OS_TICK_SPOKE *TickSpokePtr; /* 用于回指到链表根部 */
OS_TICK TickCtrMatch; /* 该值等于时基计数器 OSTickCtr 的值加上 TickRemain 的值 */
OS_TICK TickRemain; /* 设置任务还需要等待多少个时钟周期 */
OS_TICK TimeQuanta; /* 任务需要多少个时间片 */
OS_TICK TimeQuantaCtr; /* 任务剩余的时间片个数 */
};
2 时间片轮转调度函数 OS_SchedRoundRobin()(os_core.c)
该函数实现了时间片轮转调度的功能,完成的步骤是:
- 传入的参数是就绪列表的一个数组元素,进而可以获知对应的双向链表头指针,即链表的第一个 TCB 节点。
- 如果双向链表为空,或者获得的是最低优先级的双向链表(是空闲任务 TCB 所在的地方),那么不进行调度。
- 否则就是普通情况了,把第一个 TCB 的时间片计数器减一。
- 如果减一后发现还未归零,则说明该任务的时间片未用完,不进行调度。
- 如果减一后发现还归零了,则说明该任务的时间片已用完,将第一个 TCB 放到链表最后。
- 第一个 TCB 换成了新的任务 TCB,设置好时间片计数器。
/* 时间片调度函数 */
#if OS_CFG_SCHED_ROUND_ROBIN_EN > 0u
void OS_SchedRoundRobin (OS_RDY_LIST *p_rdy_list)
{
OS_TCB *p_tcb;
CPU_SR_ALLOC();
CPU_CRITICAL_ENTER(); /* 进入临界段 */
p_tcb = p_rdy_list->HeadPtr;
/* 如果链表为空,或是空闲任务,则退出 */
if ((p_tcb == (OS_TCB *)0) || (p_tcb == &OSIdleTaskTCB))
{
CPU_CRITICAL_EXIT(); /* 退出临界段 */
return;
}
/* 如果时间片未用完,时间片个数减一 */
if (p_tcb->TimeQuantaCtr > (OS_TICK)0)
{
p_tcb->TimeQuantaCtr--;
}
/* 如果减一后,时间片仍未用完,则退出 */
if (p_tcb->TimeQuantaCtr > (OS_TICK)0)
{
CPU_CRITICAL_EXIT(); /* 退出临界段 */
return;
}
/* 如果链表只有一个节点,则退出 */
if (p_rdy_list->NbrEntries < (OS_OBJ_QTY)2)
{
CPU_CRITICAL_EXIT(); /* 退出临界段 */
return;
}
/* 运行到此处时,意味着当前任务已经用完了时间片,将任务放到链表最后 */
OS_RdyListMoveHeadToTail (p_rdy_list);
/* 重设下一个任务的时间片计数 */
p_tcb = p_rdy_list->HeadPtr;
p_tcb->TimeQuantaCtr = p_tcb->TimeQuanta;
CPU_CRITICAL_EXIT(); /* 退出临界段 */
}
#endif
需要注意的是,时间片轮转调度功能可以开启,也可以关闭,在宏定义 OS_CFG_SCHED_ROUND_ROBIN_EN 中(位于 os_cfg.h)可以设置。
3 修改相关代码
接下来,修改有关时间片的代码部分。
3.1 SysTick 中断发起后调用 OSTimeTick()(os_time.c)
当 SysTick 发起一次中断时,说明一个时间片已经过去,需调用 OS_SchedRoundRobin(),更新 TCB 中的时间片计数器,同时检查有无 TCB 的时间片用完。
void OSTimeTick (void)
{
/* 更新时基列表 */
OS_TickListUpdate();
/* 时间片调度 */
#if OS_CFG_SCHED_ROUND_ROBIN_EN > 0u
OS_SchedRoundRobin (&OSRdyList[OSPrioCur]);
#endif
/* 任务调度 */
OSSched();
}
3.2 任务创建函数 OSTaskCreate()(os_task.c)
需要加入初始化时间片成员的代码。现在,创建一个任务时,用户还需要指定该任务的时间片个数。
/* 任务创建函数 */
void OSTaskCreate( OS_TCB *p_tcb, /* TCB指针 */
OS_TASK_PTR p_task, /* 任务函数名 */
void *p_arg, /* 任务的形参 */
OS_PRIO prio, /* 任务优先级 */
CPU_STK *p_stk_base, /* 任务栈的起始地址 */
CPU_STK_SIZE stk_size, /* 任务栈大小 */
OS_TICK time_quanta, /* 时间片个数 */
OS_ERR *p_err ) /* 错误码 */
{
CPU_STK *p_sp;
CPU_SR_ALLOC();
OS_TaskInitTCB (p_tcb);
p_sp = OSTaskStkInit ( p_task,
p_arg,
p_stk_base,
stk_size ); /* 任务栈初始化函数 */
p_tcb->Prio = prio; /* 任务优先级保存在 TCB 的 prio 中 */
p_tcb->StkPtr = p_sp; /* 剩余栈的栈顶指针 p_sp 保存到任务控制块 TCB 的 StkPtr 中 */
p_tcb->StkSize = stk_size; /* 将任务栈的大小保存到任务控制块 TCB 的成员 StkSize 中 */
p_tcb->TimeQuanta = time_quanta;
#if OS_CFG_SCHED_ROUND_ROBIN_EN > 0u
p_tcb->TimeQuantaCtr = time_quanta;
#endif
OS_CRITICAL_ENTER(); /* 进入临界段 */
/* 将任务添加到就绪列表 */
OS_PrioInsert (p_tcb->Prio);
OS_RdyListInsertTail (p_tcb);
OS_CRITICAL_EXIT(); /* 退出临界段 */
*p_err = OS_ERR_NONE; /* 函数执行到这里表示没有错误 */
}
3.3 空闲任务初始化函数 OS_IdleTaskInit()(os_core.c)
将空闲任务的时间片分配为 0,因为空闲任务位于最低优先级,而且是独占了最低优先级,因此不需要分配时间片。
/* 空闲任务初始化函数 */
void OS_IdleTaskInit (OS_ERR *p_err)
{
OSIdleTaskCtr = (OS_IDLE_CTR) 0; /* 计数器清零 */
OSTaskCreate ((OS_TCB*) &OSIdleTaskTCB,
(OS_TASK_PTR) OS_IdleTask,
(void *) 0,
(OS_PRIO) (OS_CFG_PRIO_MAX - 1u),
(CPU_STK *) OSCfg_IdleTaskStkBasePtr,
(CPU_STK_SIZE) OSCfg_IdleTaskStkSize,
(OS_TICK) 0,
(OS_ERR *) &p_err); /* 创建空闲任务 */
}
4 时间片轮调度的应用
4.1 主函数 main()(app.c)
需要修改的地方:
- 设置 Task1 优先级为 1,分配的时间片为 0;Task1 内部,两次阻塞延时都为 4。
- 设置 Task2 优先级为 2,分配的时间片为 2;Task2 内部不用两次阻塞延时,用两次软件延时;
- 设置 Task3 优先级为 2,分配的时间片为 2;Task3 内部不用两次阻塞延时,用两次软件延时;
#include "ARMCM3.h"
#include "os.h"
#define TASK1_STK_SIZE 128
#define TASK2_STK_SIZE 128
#define TASK3_STK_SIZE 128
static CPU_STK Task1Stk[TASK1_STK_SIZE];
static CPU_STK Task2Stk[TASK2_STK_SIZE];
static CPU_STK Task3Stk[TASK3_STK_SIZE];
static OS_TCB Task1TCB;
static OS_TCB Task2TCB;
static OS_TCB Task3TCB;
uint32_t flag1;
uint32_t flag2;
uint32_t flag3;
void Task1 (void *p_arg);
void Task2 (void *p_arg);
void Task3 (void *p_arg);
/* 软件延时 */
void delay(uint32_t count);
int main (void)
{
OS_ERR err;
/* 初始化相关的全局变量,创建空闲任务 */
OSInit(&err);
/* CPU 初始化:初始化时间戳 */
CPU_Init();
/* 关中断,因为此时 OS 未启动,若开启中断,那么 SysTick 将会引发中断 */
CPU_IntDis();
/* 初始化 SysTick,配置 SysTick 为 10ms 中断一次,Tick = 10ms */
OS_CPU_SysTickInit(10);
/* 创建任务 */
OSTaskCreate ((OS_TCB*) &Task1TCB,
(OS_TASK_PTR) Task1,
(void *) 0,
(OS_PRIO) 1,
(CPU_STK*) &Task1Stk[0],
(CPU_STK_SIZE) TASK1_STK_SIZE,
(OS_TICK) 0,
(OS_ERR *) &err);
OSTaskCreate ((OS_TCB*) &Task2TCB,
(OS_TASK_PTR) Task2,
(void *) 0,
(OS_PRIO) 2,
(CPU_STK*) &Task2Stk[0],
(CPU_STK_SIZE) TASK2_STK_SIZE,
(OS_TICK) 2,
(OS_ERR *) &err);
OSTaskCreate ((OS_TCB*) &Task3TCB,
(OS_TASK_PTR) Task3,
(void *) 0,
(OS_PRIO) 2,
(CPU_STK*) &Task3Stk[0],
(CPU_STK_SIZE) TASK3_STK_SIZE,
(OS_TICK) 2,
(OS_ERR *) &err);
/* 启动OS,将不再返回 */
OSStart(&err);
}
/* 软件延时 */
void delay (uint32_t count)
{
for(; count!=0; count--);
}
void Task1 (void *p_arg)
{
for (;;)
{
flag1 = 1;
OSTimeDly (4);
flag1 = 0;
OSTimeDly (4);
}
}
void Task2 (void *p_arg)
{
for (;;)
{
flag2 = 1;
delay (0xFF);
flag2 = 0;
delay (0xFF);
}
}
void Task3 (void *p_arg)
{
for (;;)
{
flag3 = 1;
delay (0xFF);
flag3 = 0;
delay (0xFF);
}
}
4.2 运行过程
4.2.1 在主函数中
- 系统初始化:初始化各种全局变量,初始化优先级表,初始化就绪列表,初始化时基列表,初始化空闲任务(包括初始化空闲任务栈和空闲任务 TCB)。
- CPU 初始化:暂为空。
- 关中断:因为此时 OS 未启动,若开启中断,那么 SysTick 将会引发中断,打断初始化流程。
- 初始化 SysTick:配置 SysTick 为 10ms 中断一次,Tick = 10ms。
- 创建任务:包括创建任务栈和任务 TCB,以及将 TCB 插入到就绪列表中,在优先级表对应位置置位。
- 启动系统:先找到最高优先级,然后开始运行最高优先级对应的任务(最高优先级为 1,即为 Task1),启动第一次任务切换(此时将完成最后的初始化流程,即有关 PendSV 的中断优先级配置,接着触发 PendSV 异常,发起任务切换),将 CPU 占有权交给任务 Task1。
4.2.2 在 Task1 中
- flag1 = 1。
- 执行到阻塞函数 OSTimeDly:将 Task1 的 TCB 插入到时基列表中(TickCtrMatch = 4),将就绪列表中的 TCB 移除(同时在优先级表中的相应位置,即优先级 1 的位置清零),然后启动任务调度。
- 执行任务调度 OSSched:任务调度器先找到最高优先级,然后再找到最高优先级的任务。 TCB。如果发现该任务就是当前任务,则不进行任务切换。在本案例中发现最高优先级为 2,对应任务是 Task2,不是当前任务,则发起任务切换(发起 PendSV 异常)。
- PendSV 异常处理程序:保存 Task1 的状态,加载 Task2 的状态,更新全局变量的值。
此时时基计数器为 0,Task1 的延时时间是 4 个 SysTick 周期,OSCfg_TickWheelSize = 17,因此位于 OSCfg_TickWheel[4] 下的双向链表。
4.2.3 在 Task2 中
- flag2 = 1。
- 软件延时后 flag2 = 0,再延时后又等于 1。此时 Task2 的 TimeQuantaCtr = 2。如此反复,直到一次 SysTick 中断的到来。
4.2.4 在 Task2 中 SysTick 发起中断
- 执行 OSTimeTick:时基计数器加一(OSTickCtr = 1),检查时基列表(OSCfg_TickWheel[1]),发现没有任务。检查当前任务 TCB 的时间片,时间片计数器减一,Task2 的 TimeQuantaCtr = 1,时间片未用完。最后发起任务调度,发现不用进行任务切换,Task2 继续运行。
- SysTick 再次发起中断,执行 OSTimeTick:时基计数器加一(OSTickCtr = 2),检查时基列表(OSCfg_TickWheel[2]),发现没有任务。检查当前任务 TCB 的时间片,时间片计数器减一,Task2 的 TimeQuantaCtr = 0,时间片用完,移到链表的最后。最后发起任务调度,由于链表的第一个 TCB 是 Task3 的,切换到 Task3 继续运行。
4.2.5 在 Task3 中
- flag3 = 1。
- 软件延时后 flag3 = 0,再延时后又等于 1。此时 Task3 的 TimeQuantaCtr = 2。如此反复,直到一次 SysTick 中断的到来。
4.2.6 在 Task3 中 SysTick 发起中断
- 执行 OSTimeTick:时基计数器加一(OSTickCtr = 3),检查时基列表(OSCfg_TickWheel[3]),发现没有任务。检查当前任务 TCB 的时间片,时间片计数器减一,Task3 的 TimeQuantaCtr = 1,时间片未用完。最后发起任务调度,发现不用进行任务切换,Task3 继续运行。
- SysTick 再次发起中断,执行 OSTimeTick:时基计数器加一(OSTickCtr = 4),检查时基列表(OSCfg_TickWheel[4]),发现有任务,Task1 已经延时到期。将它置为就绪态,置为就绪态的过程是:在时基列表中删除 Task1 的 TCB,在就绪列表中加入 Task1 的 TCB(同时将 Task1 的优先级在优先级表中的相应位置重新置位)。检查当前任务 TCB 的时间片,时间片计数器减一,Task3 的 TimeQuantaCtr = 0,时间片用完,移到链表的最后。最后发起任务调度,发现最高优先级为 1 处有任务,为 Task1,切换到 Task1 中运行。
4.2.7 又在 Task1 中
- flag1 = 0。
- 执行到阻塞函数 OSTimeDly:将 Task1 的 TCB 插入到时基列表中(TickCtrMatch = 4),将就绪列表中的 TCB 移除(同时在优先级表中的相应位置,即优先级 1 的位置清零),然后启动任务调度。
- 执行任务调度 OSSched:任务调度器先找到最高优先级,然后再找到最高优先级的任务。 TCB。如果发现该任务就是当前任务,则不进行任务切换。在本案例中发现最高优先级为 2,对应任务是 Task2,不是当前任务,则发起任务切换(发起 PendSV 异常)。
- PendSV 异常处理程序:保存 Task1 的状态,加载 Task2 的状态,更新全局变量的值。
如此反复,不再赘述。
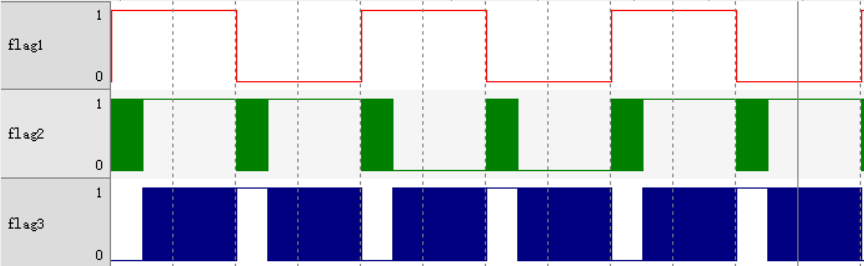
4.3 实验现象
Task1 被阻塞 4 个时间片的间隔内,Task2 和 Task3 轮流执行了一次,先是 Task2(运行 2 个时间片),后是 Task3(运行 2 个时间片)。这些色块代表了任务正在被执行,变量被不停地翻转,如下图:

假如设置 Task2 运行 1 个时间片,Task3 运行 3 个时间片,则会变成这样:
到此,uCOS 内核已经全部实现完毕,后面的内容是 uCOS 的 API 应用。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号