RVIZ第二课
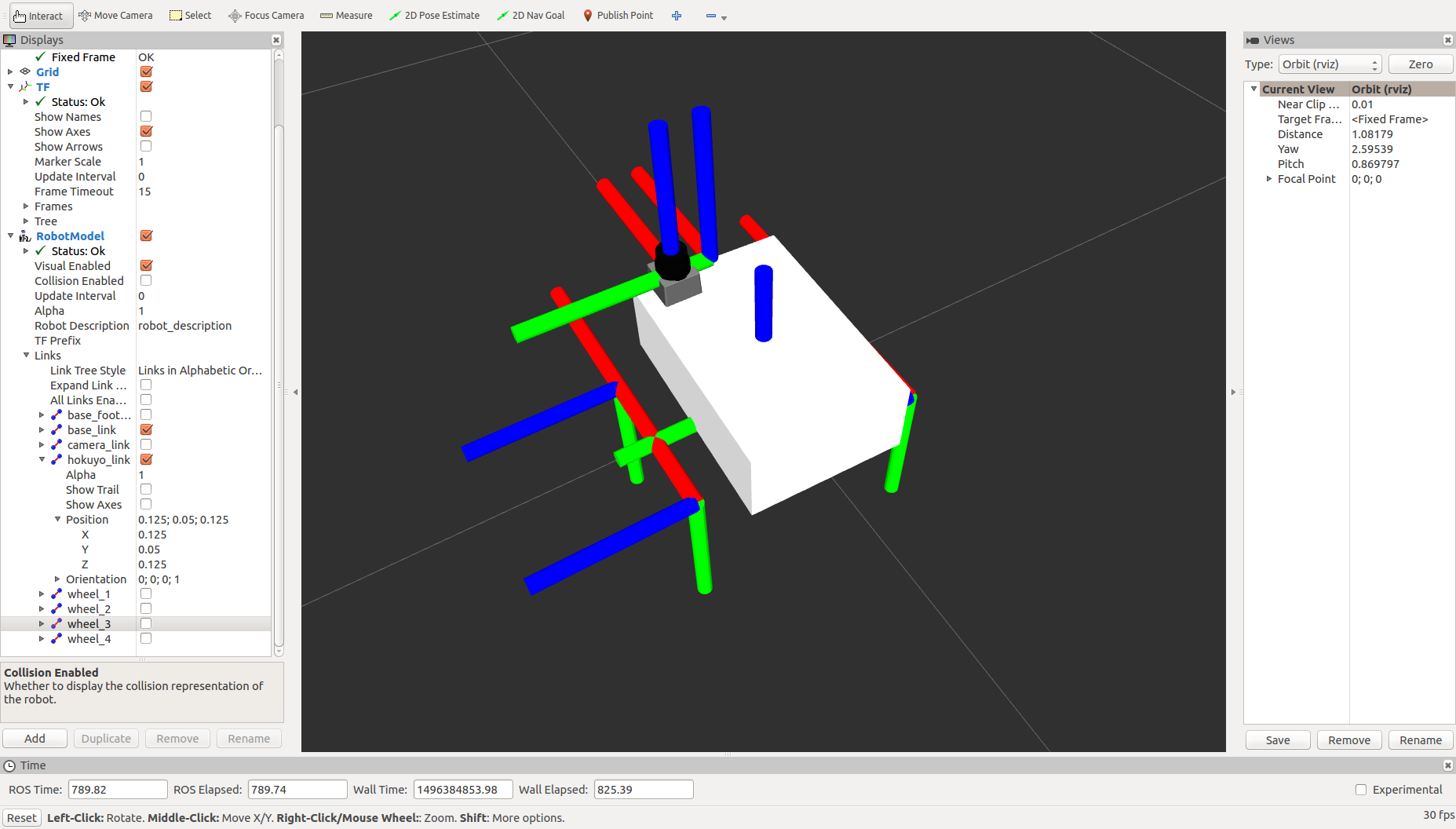
上图只保留的激光的laser_link跟base_link, 我试图搞清楚他们的位置关系, 在xacro文件里面, 定义的link相关信息是:
1 <!-- Hokuyo joint --> 2 <joint name="hokuyo_joint" type="fixed"> 3 <origin xyz="0.125 0.05 0.125" rpy="0 0 0"/> 4 <parent link="base_link"/> 5 <axis xyz="0 1 0" /> 6 <child link="hokuyo_link"/> 7 </joint> 8 9 <!-- Hokuyo Laser --> 10 <link name="hokuyo_link"> 11 <collision> 12 <origin xyz="0 0 0" rpy="0 0 0"/> 13 <geometry> 14 <box size="0.1 0.1 0.1"/> 15 </geometry> 16 </collision> 17 18 <visual> 19 <origin xyz="0 0 0" rpy="0 0 0"/> 20 <geometry> 21 <mesh filename="package://chapter8_tutorials/meshes/hokuyo.dae"/> 22 </geometry> 23 </visual> 24 25 <inertial> 26 <mass value="1e-5" /> 27 <origin xyz="0 0 0" rpy="0 0 0"/> 28 <inertia ixx="1e-6" ixy="0" ixz="0" iyy="1e-6" iyz="0" izz="1e-6" /> 29 </inertial> 30 </link>
可以看到, 关节的位置是父link是base_link, 子link就是laser_link, 它的origin xyz, 就是相对它爹的位置吧, 结合上面rviz的截图, 发现, hokuyo_link, (hokuyo是个日本子激光传感器厂)的position就是这个0.125, 0.05, 0.125, 然后google了一下, 才知道, 红色是x轴, 绿色是y轴, 蓝色是z轴, 再看看base_link的位置, 没毛病!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号