
ContextCapture 倾斜维摄影三重建备忘录
一、影像数据准备阶段
1、影像pos信息确认
2、控制点确认(控制点与控制校准点)精度要求不高,照片带有控制点,这个步骤可以不要
二、ContextCapture设置
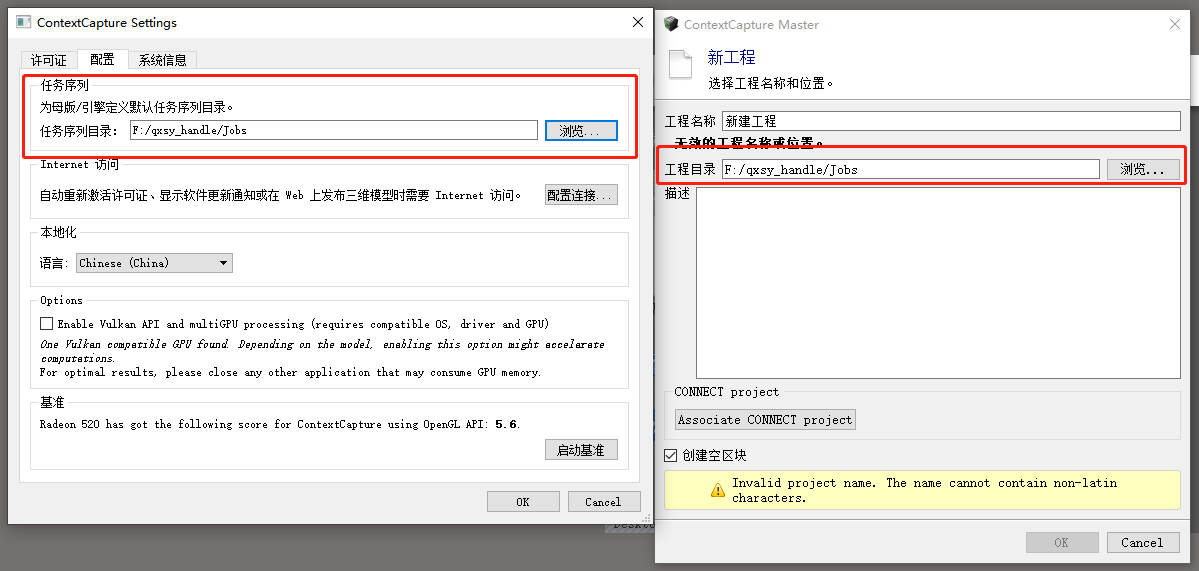
1、ContextCapture Setting 配置任务目录
这个目录需要与创建的工程—>的选项,任务目录一致
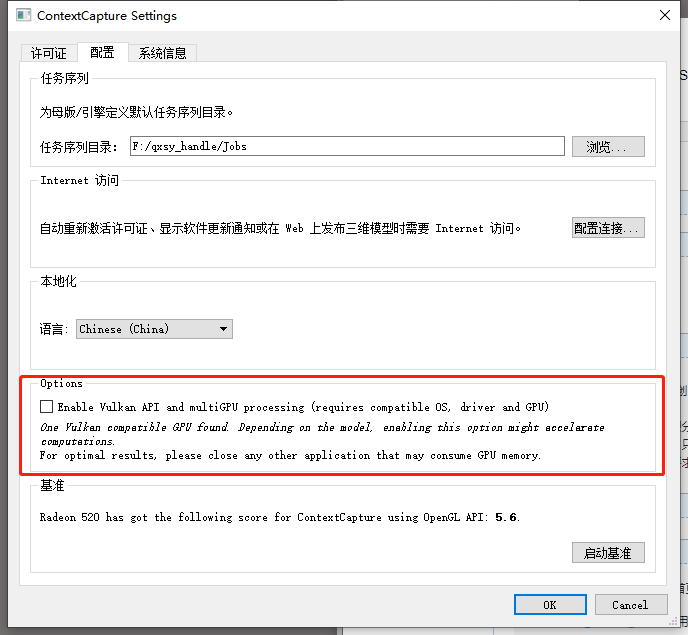
2、ContextCapture Setting 多显卡配置,勾选打开
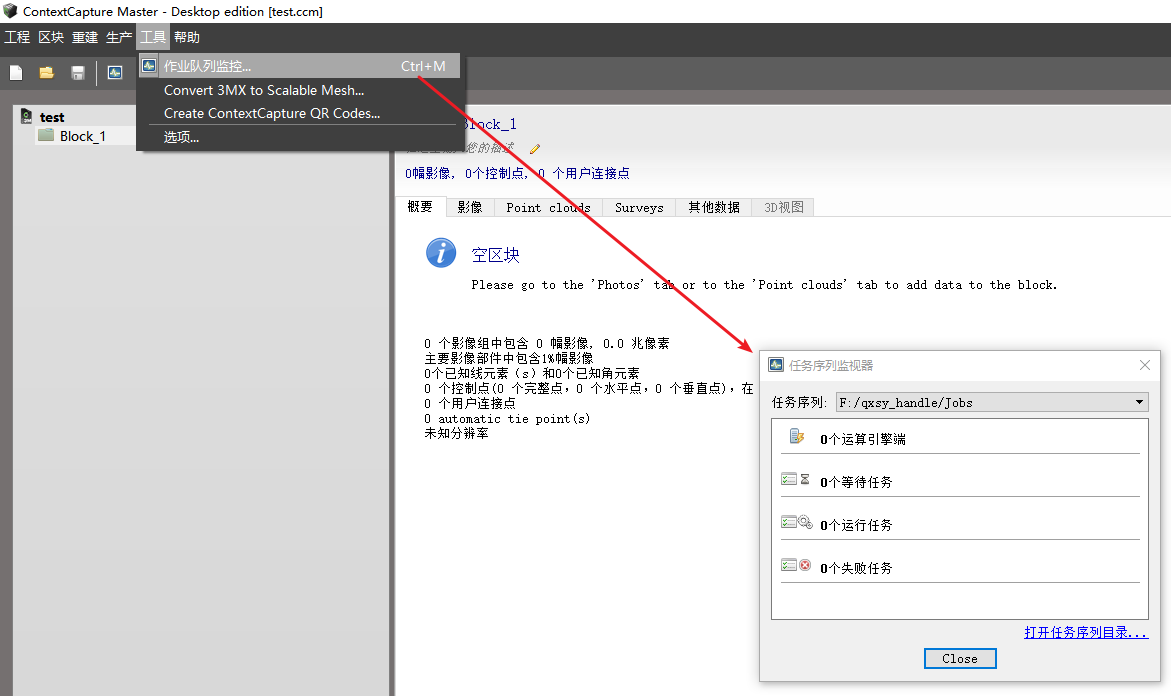
3、ContextCapture Mater 顶部工具栏,工具选项,查看任务队列目录,是否和步骤1一致
三、空三(参考塞尔相机教程:https://shareuav.yuque.com/docs/share/d9847eb0-affa-413b-aa0e-596721d2823e)
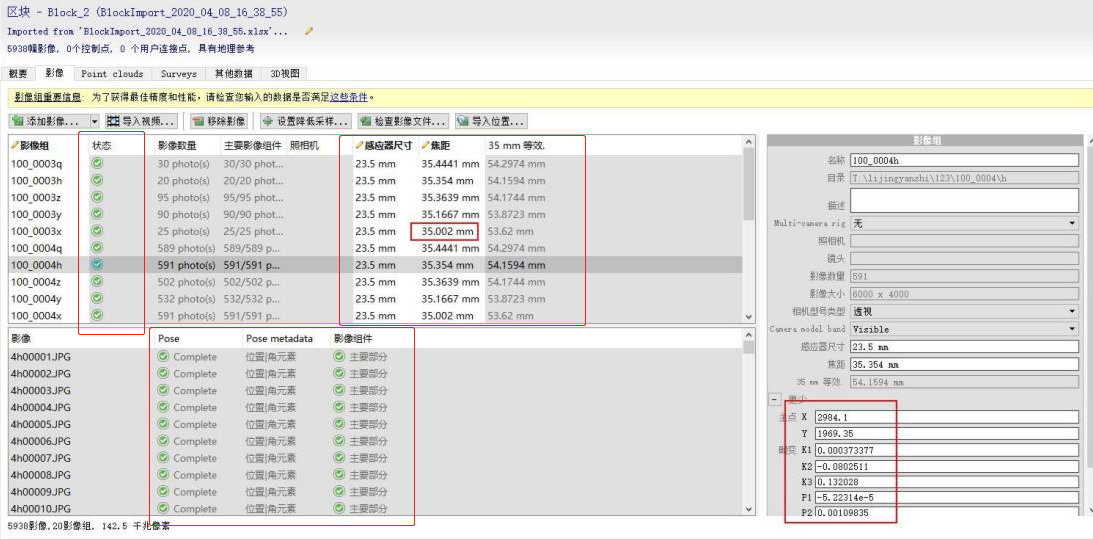
1、在新建工程中,导入block或新建工程导入图片组(根据你是否具有block表格文件)
塞尔相机PSDK102s 工具直接可以导出block表格文件
其它相机根据实际情况而定,最总的目的是让你的照片都具有相机信息、pos信息
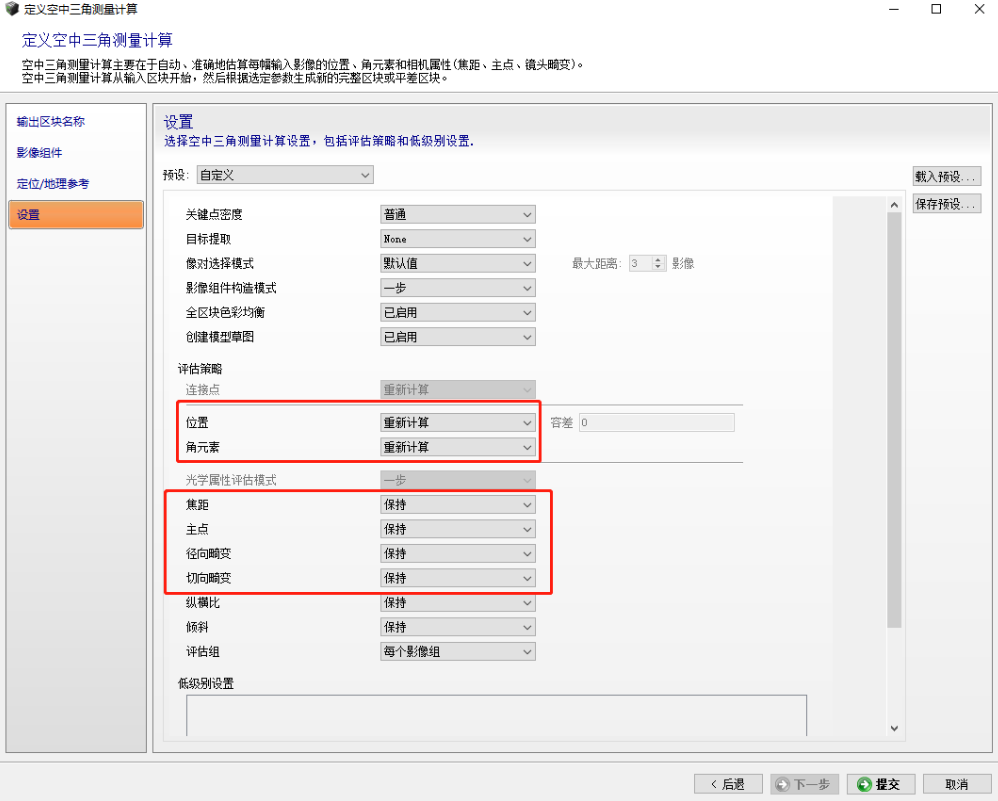
2、提交自由网空三,修改参数如下,其他参数默认
第一遍空三可根据影像导入情况选择以下两种设置中的任意一种均可。
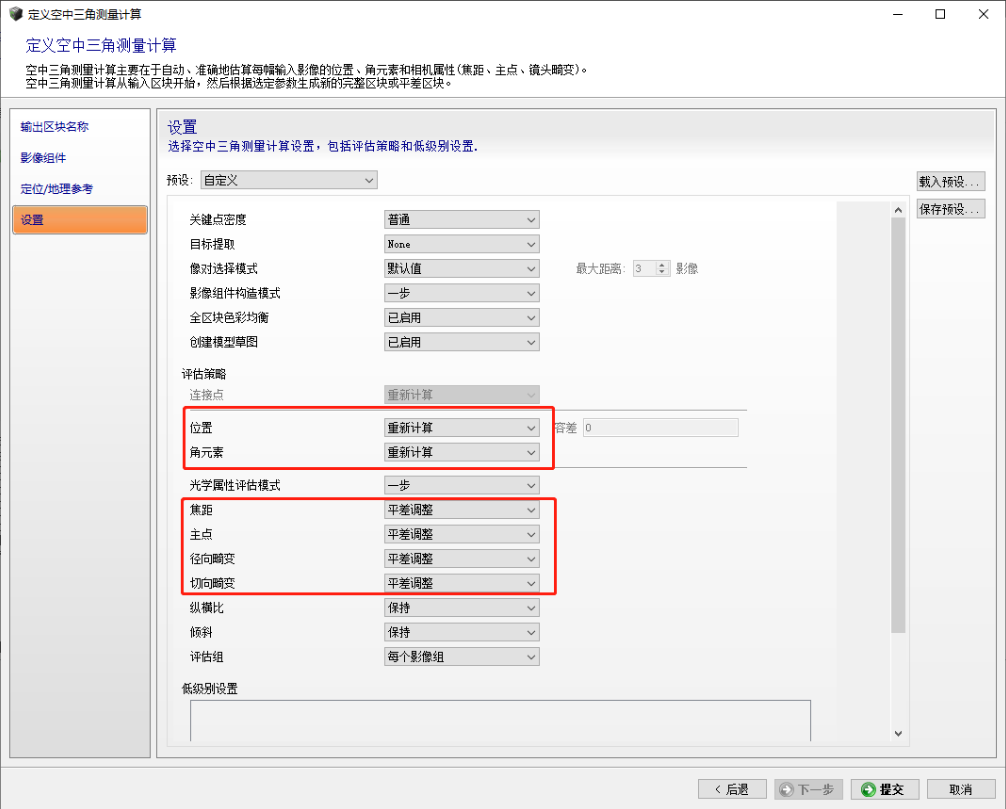
或
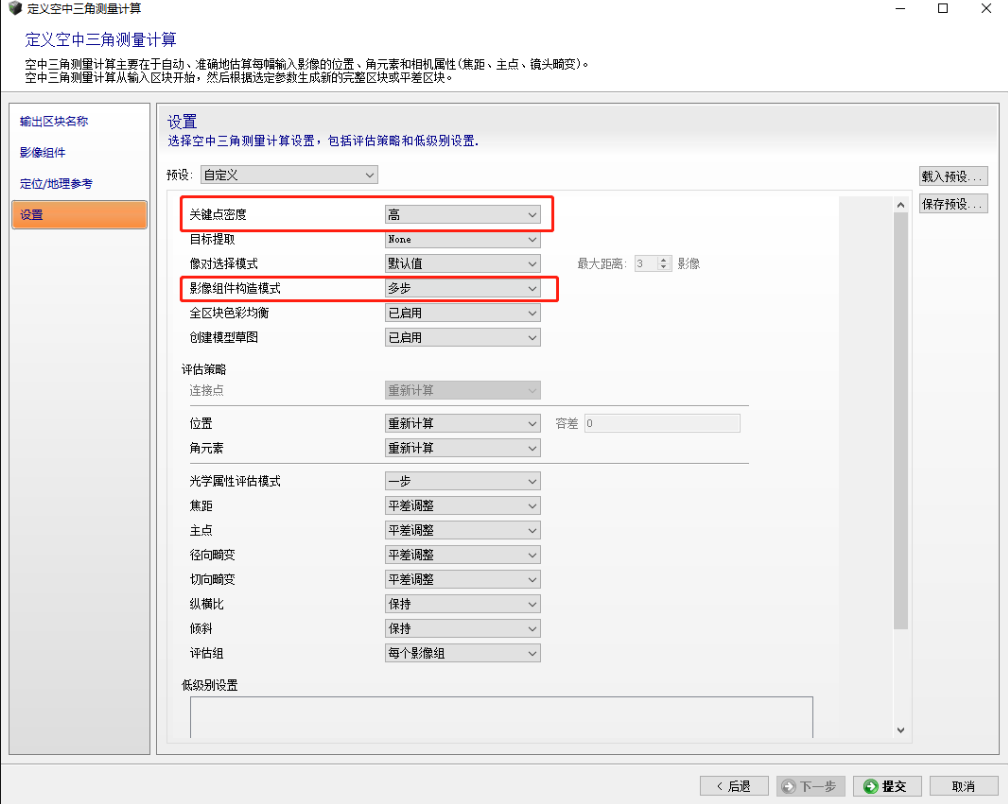
3、若第一遍空三未能满足精度要求或是空三出现分层情况可更改空三设置
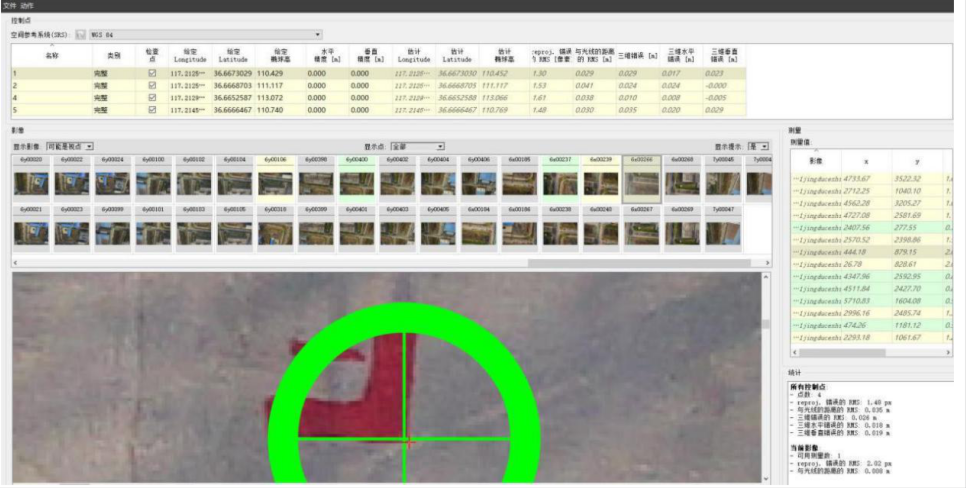
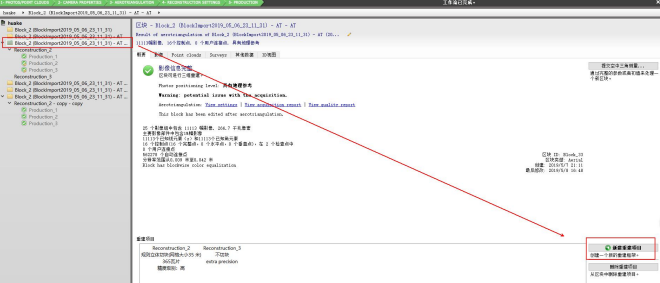
5、输出检查点平差报告
(1)刺点完成后,再次提交自由网空三(沿用默认设置即可),软件将输出检查点的误差报告。
(2)精度检查
查看空三报告,检查是否符合免像控精度。经过大量严格测试证明,PSDK 102S 在无像控点的情况下,检查点最大精度误差在 3 个像素误差范围内,中误差一般在 1~2 个像素误差范围内,可以完成免相控高精度建模任务
四、重建设置
1、空三结果中开启一个重建,使用“概要”选项卡中右下角的“新建重建项目”按钮,如下图
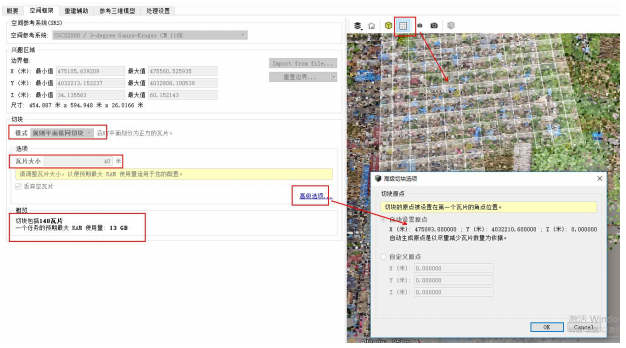
2、进行建模参数设置,如下图所示,坐标系统(114E)

3、设置建模范围
使用软件自带的工具手动修改建模范围,以及导入 KML 进行约束修改

4、设置瓦片划分方式与瓦片大小
分块方式(规则平面格网)
设置分块原点,一般默认(如果一个大的测区分为很多小的测区工程,需要统一每个工程的分块原点 )
5、重建处理设置
根据需求选择几何精度,一般地籍测量选择 extra 或高,其他项目选择中即可
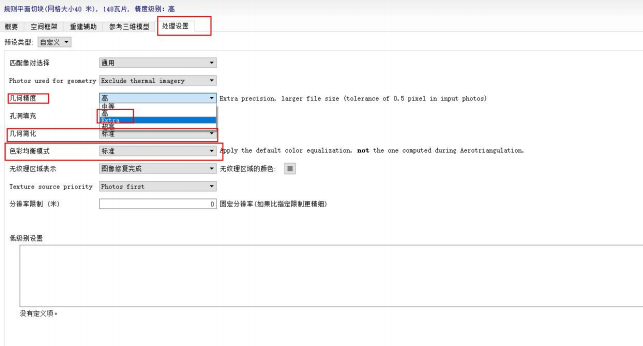
6、提交
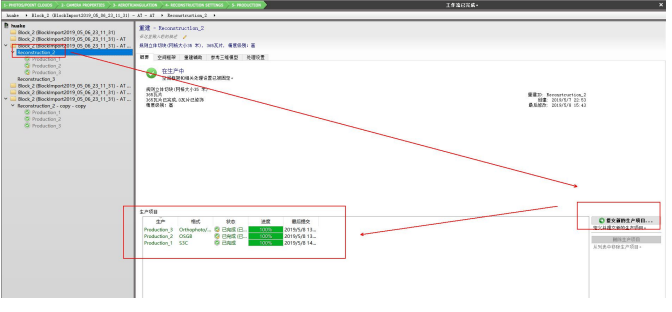
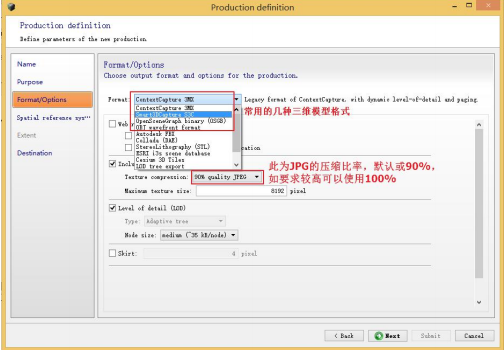
五、产品类型
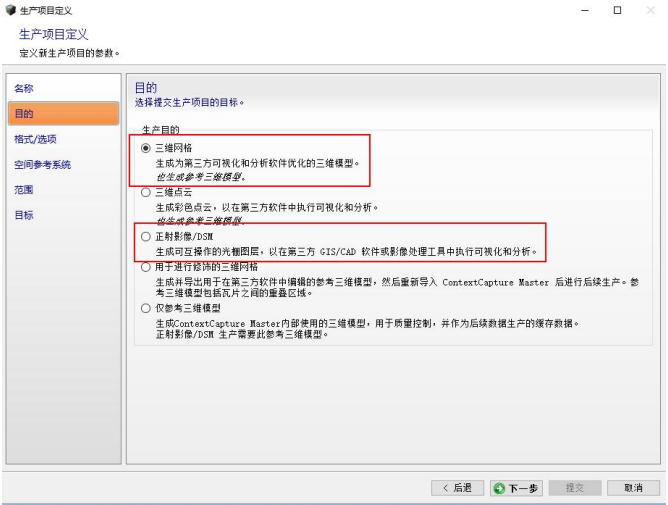
1、常用生成格式为 s3c/osgb/3dtile/obj 等格式,纹理贴图一般选择 70%(一般项目)或 90%(地籍测量推荐)
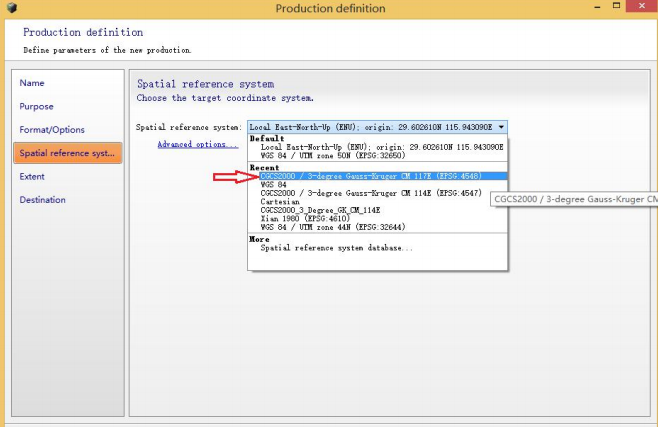
2、为生成产品的过程中进行的坐标系选择和设置原点设置原点(如果一个工程分几个区域建模,需要统一原点)
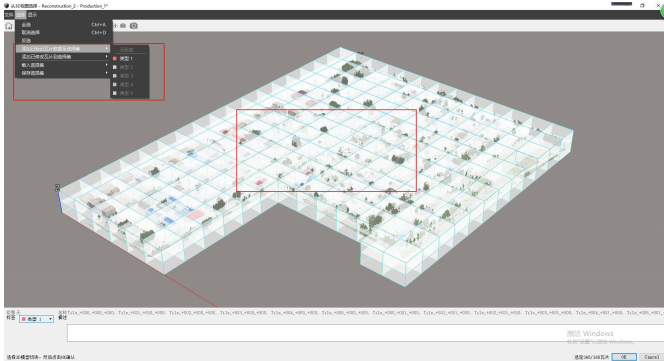
3、定义生产集
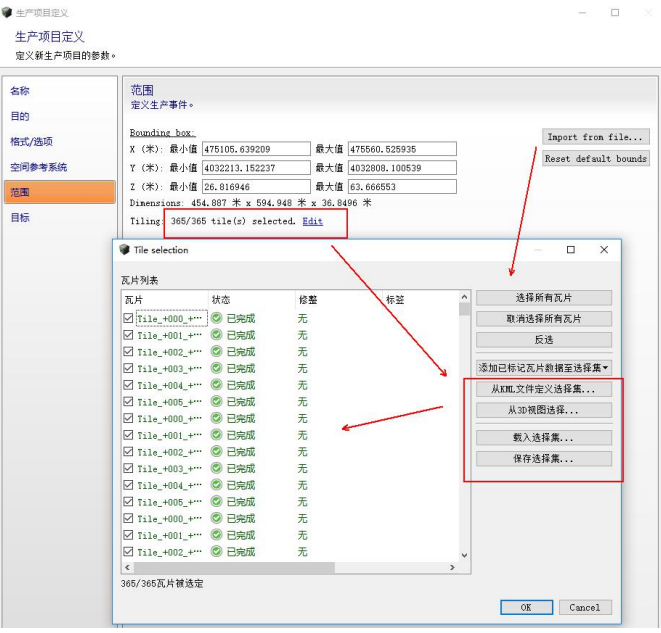
通过鼠标选择
4、提交运行
六、其他设置
1、三维重建一定要注意系统的独立显卡是否使用起来,安装最新的显卡驱动,在显卡控制面板进行应用程序的3D设置;
2、可以在任务管理器中,查看CC使用到的任务进程,设置进程的优先级为高。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号