起因:
公司有一个小项目,大概逻辑如下:
服务器A会不断向队列中push消息,消息主要内容是视频的地址,服务器B则需要不断从队列中pop消息,然后将该视频进行剪辑最终将剪辑后的视频保存到云服务器。个人主要实现B服务器逻辑。
实现思路:
1 线程池+多进程
要求点一:主进程要以daemon的方式运行。
要求点二:利用线程池,设置最大同时运行的worker,每一个线程通过调用subprocess中的Popen来运行wget ffprobe ffmpeg等命令处理视频。
2 消息队列采用redis的list实现
3 主线程从队列中获取到消息后,从线程池中获取空闲从线程(在这里,非主线程统称为从线程,下同),从线程对该消息做一些逻辑上的处理后,然后生成进程对视频进行剪辑,最后上传视频。
要求点三:为了让daemon能在收到signint信号时,处理完当前正在进行的worker后关闭,且不能浪费队列中的数据,需要让主进程在有空闲worker时才从队列中获取数据。
大概就是这样:
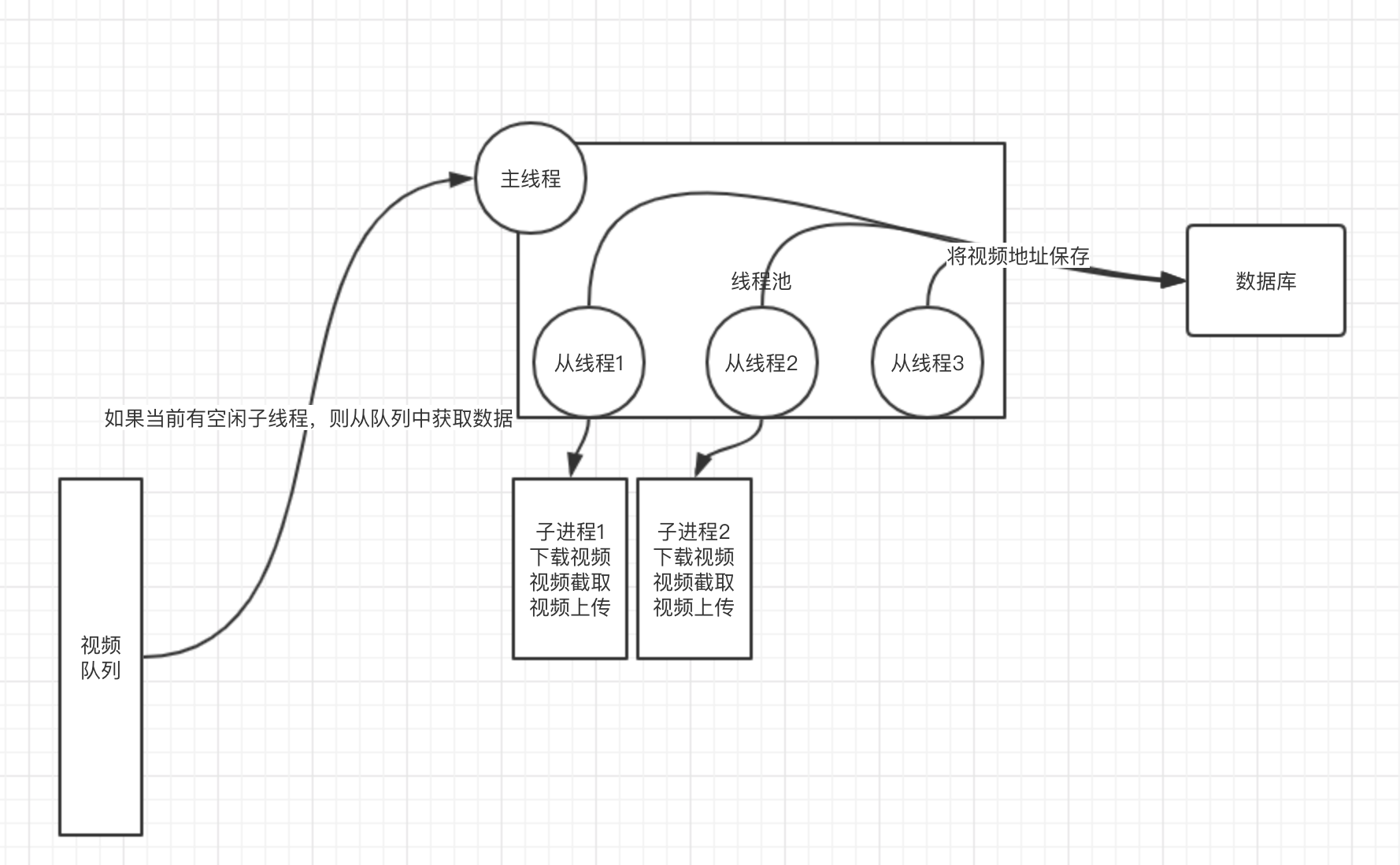
基本上主要资源耗费在视频下载以及视频处理上,且同时运行的worker(从线程)不会太多(一般cpu有几个就设置几个worker)。
上面一共有三个要求点,其中要求点二并不费事。所以忽略。
实现
要求点一实现:


# -*- coding: utf8 -*- import os import sys import time import signal import traceback # from *** def write_pid_file(pid_file, pid): import fcntl import stat try: fd = os.open(pid_file, os.O_RDWR | os.O_CREAT, stat.S_IRUSR | stat.S_IWUSR) except OSError: traceback.print_exc() return -1 flags = fcntl.fcntl(fd, fcntl.F_GETFD) assert flags != -1 flags |= fcntl.FD_CLOEXEC r = fcntl.fcntl(fd, fcntl.F_SETFD, flags) assert r != -1 # There is no platform independent way to implement fcntl(fd, F_SETLK, &fl) # via fcntl.fcntl. So use lockf instead try: fcntl.lockf(fd, fcntl.LOCK_EX | fcntl.LOCK_NB, 0, 0, os.SEEK_SET) except IOError: r = os.read(fd, 32) if r: print('already started at pid %s' % (r)) else: print('already started') os.close(fd) return -1 os.ftruncate(fd, 0) os.write(fd, (str(pid))) return 0 def freopen(f, mode, stream): oldf = open(f, mode) oldfd = oldf.fileno() newfd = stream.fileno() os.close(newfd) os.dup2(oldfd, newfd) def daemon_start(settings, main_process_handler): def handle_exit(signum, _): if signum == signal.SIGTERM: sys.exit(0) sys.exit(1) signal.signal(signal.SIGINT, handle_exit) signal.signal(signal.SIGTERM, handle_exit) pid = os.fork() assert pid != -1 # Parent if pid: time.sleep(3) sys.exit(0) print("child has forked") # child signals its parent to exit ppid = os.getppid() pid = os.getpid() if write_pid_file(settings.PID_FILE, pid) != 0: os.kill(ppid, signal.SIGINT) sys.exit(1) # set self to process-group-leader os.setsid() signal.signal(signal.SIGHUP, signal.SIG_IGN) print('started') os.kill(ppid, signal.SIGTERM) # octal 022 os.umask(18) sys.stdin.close() try: freopen(settings.DEBUG_LOG_PATH, 'a', sys.stdout) freopen(settings.DEBUG_LOG_PATH, 'a', sys.stderr) except IOError: print(traceback.print_exc()) sys.exit(1) main_process_handler() def daemon_stop(pid_file): import errno try: with open(pid_file) as f: pid = buf = f.read() if not buf: print('not running') except IOError as e: print(traceback.print_exc()) if e.errno == errno.ENOENT: print("not running") # always exit 0 if we are sure daemon is not running return sys.exit(1) pid = int(pid) if pid > 0: try: os.kill(pid, signal.SIGTERM) except OSError as e: if e.errno == errno.ESRCH: print('not running') # always exit 0 if we are sure daemon is not running return print(traceback.print_exc()) sys.exit(1) else: print('pid is not positive: %d', pid) # sleep for maximum 300s for i in range(0, 100): try: # query for the pid os.kill(pid, 0) except OSError as e: # not found the process if e.errno == errno.ESRCH: break time.sleep(3) print("waiting for all threads finished....") else: print('timed out when stopping pid %d', pid) sys.exit(1) print('stopped') os.unlink(pid_file) def main(): args = sys.argv[1:] assert len(args) == 2 if args[0] not in ["stop", "start"]: print("only supported: [stop | start]") return if args[1] not in ["dev", "local", "prod"]: print("only supported: [dev | local | prod]") from globals import set_settings, initialize_redis set_settings(args[1]) initialize_redis() from globals import settings import entry if args[0] == "stop": print("stopping...") daemon_stop(settings.PID_FILE) elif args[0] == "start": print("starting...") daemon_start(settings, entry.run) main()
要求点三实现:
线程池,采用python的futures模块。该模块提供了线程池的机制。稍微说一下他的线程池实现原理吧,ThreadPoolExecutor该类实现了线程池:
1 每个实例本身有个_work_queue属性,这是一个Queue对象,里面存储了任务。
2 每当我们调用该对象的submit方法时,都会向其_work_queue中放入一个任务,同时生成从线程,直到从线程数达到max_worker所设定的值。
3 该线程池实例中所有的从线程会不断的从_work_queue中获取任务,并执行。同时从线程的daemon属性被设置为True
# -*- coding: utf8 -*- import json import traceback import signal import sys import time from threading import Lock from concurrent.futures import ThreadPoolExecutor from .globals import settings, video_info_queue def handler(data): # 业务逻辑 running_futures_count = 0 def run(): global running_futures_count count_lock = Lock() pool = ThreadPoolExecutor(max_workers=settings.MAX_WORKER) try: def reduce_count(_): global running_futures_count with count_lock: running_futures_count -= 1 def handle_exit(_, __): print("get SIGINT signal") pool.shutdown(False) while True: if running_futures_count == 0: sys.exit(0) time.sleep(1) print("now running futures count is %s, please wait" % running_futures_count) def handle_data(data): global running_futures_count with count_lock: running_futures_count += 1 future = pool.submit(handler, data) future.add_done_callback(reduce_count) signal.signal(signal.SIGINT, handle_exit) signal.signal(signal.SIGTERM, handle_exit) while not pool._shutdown: print(len(pool._work_queue.queue), pool._shutdown) while not pool._shutdown and (len(pool._work_queue.queue) < pool._max_workers): data = video_info_queue.bpop(20) if data: handle_data(data) else: data = abnormal_video_info_queue.bpop(1) print("video_info_queue is empty, get data: %s from abnormal_video_info_queue" % data) if data: print("abnormal_video_info_queue") handle_data(data) time.sleep(5) print("now all the workers is busy, so wait and do not submit") finally: pool.shutdown(False)
重点就是那嵌套的while循环。
踩坑&收获:
1 python中只有主线程才能处理信号,如果使用线程中的join方法阻塞主线程,如果从线程运行时间过长可能会导致信号长时间无法处理。所以尽量设置从线程的daemon为True。
2 Queue的底层是deque,而deque的底层是一个双端链表,为什么用双端链表而不用list?答案请在参考中找。
3 学会了进程以daemon方式运行的实现方式:
1 pid文件的来源
2 进程以及进程组的概念
3 信号的捕捉
4 dup2函数以及fcntl函数
4 进程使用Popen()创建时,如果用PIPE作为子进程(stdin stdout stderr)与父进程进行交互时,然后调用wait时,如果子进程的stdin stdout stderr中某个数据过多可能会导致主进程卡死。原因也在参考中找。
5 sudo执行脚本时环境变量去哪了?答案请在参考中找
6 python中的weakref模块很有用啊
参考:
1 http://blog.sina.com.cn/s/blog_4da051a60102uyvg.html
2 https://toutiao.io/posts/zr31ak/preview
3 https://www.cnblogs.com/chybot/p/5176118.html
5 http://siwind.iteye.com/blog/1753517
6 https://www.jianshu.com/p/646d1d09fc53
9 ***源码

 浙公网安备 33010602011771号
浙公网安备 33010602011771号