策略梯度(Policy Gradient)
对于
DQN来说使用一个网络直接逼近了值函数,最后取得了非常不错的效果, 但是对于一些连续性控制或者动作空间特别大的环境来说,很难全部计算所有的值函数来得到最好的策略,那么直接计算策略的方法就别提出来了。
1 策略梯度理论
在Value Based的方法中,我们迭代计算的是值函数,然后根据值函数对策略进行改进;而在Policy Based方法中,我们直接对策略 \({\pi _\theta }\left( {a|s} \right)\) 进行迭代计算,直到累积回报的期望最大,此时的参数所对应的策略为最优策略。
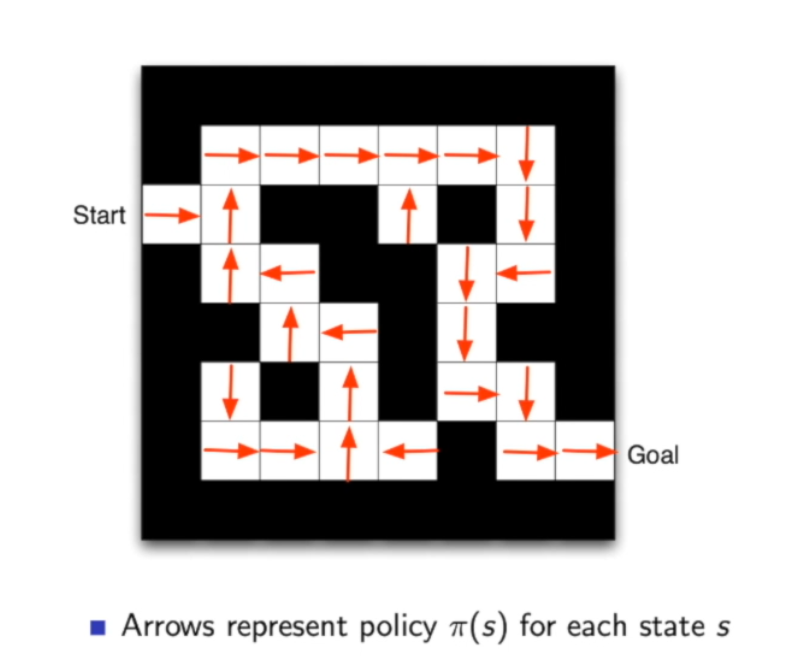
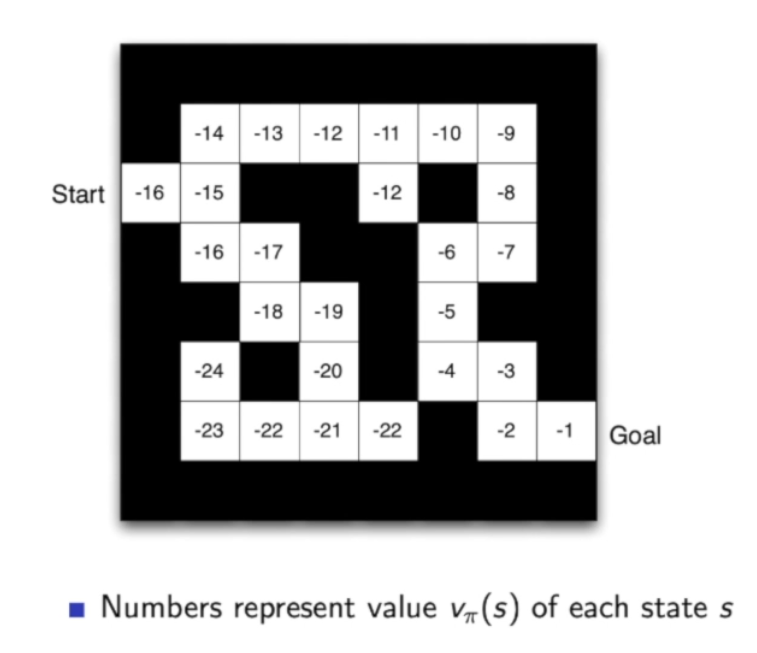
下图来自周博磊老师的课件\(^{[2]}\),左边就是基于策略的方法,可以看出每到一个地方(state)就会得到一个方向(action)。右边是基于值得方法,当到一个地方时,需要计算一下周围哪个地方的值函数更大,就会往那走。
下面用 \(\tau\) 来表示一个轨迹:\(\tau = {s_0},{a_0},{s_1},{a_1} \ldots {s_T}\). 对于给定策略,智能体和环境进行一次轨迹为 \(\tau\) 的交互,收到的总回报为:
由于策略和状态转移都有一定的个随机性,所以每次的轨迹也是随机的,我们希望基于策略的方法能够学习到一个最佳策略 \(\pi _\theta^{*} \left( {a|s} \right)\) 来最大化这个总回报的期望:
对这个目标函数 \(J\left( \theta \right)\) 求关于参数 \(\theta\) 的偏导为:
进一步求解 \(\nabla \log p_{\theta}(\tau)\) 可得:
可以看出 \(\nabla \log p_{\theta}(\tau)\) 只和策略函数 \({\pi _\theta }\left( {a|s} \right)\) 相关,和状态转移概率 \(p\left(s_{t+1} | s_{t}, a_{t}\right)\) 无关。把式 (1-4) 带入 (1-3) 可得到:
这里定义 \(G\left(\tau_{t: T}\right)\) 为把时刻 \(t\) 当成起始时刻收到的总回报:
公式 (1-5) 从第二步得到第三步也就是李宏毅课中\(^{[3]}\)讲的
Tip2,即时刻 \(t\) 之前的回报和时刻 \(t\) 之后的动作无关。这个在直觉上很好理解,今天老板看到你工作努力想给你奖赏,老板不会给你昨天的工资加倍,只会给你今天的工资或者未来的工资加倍。证明如下: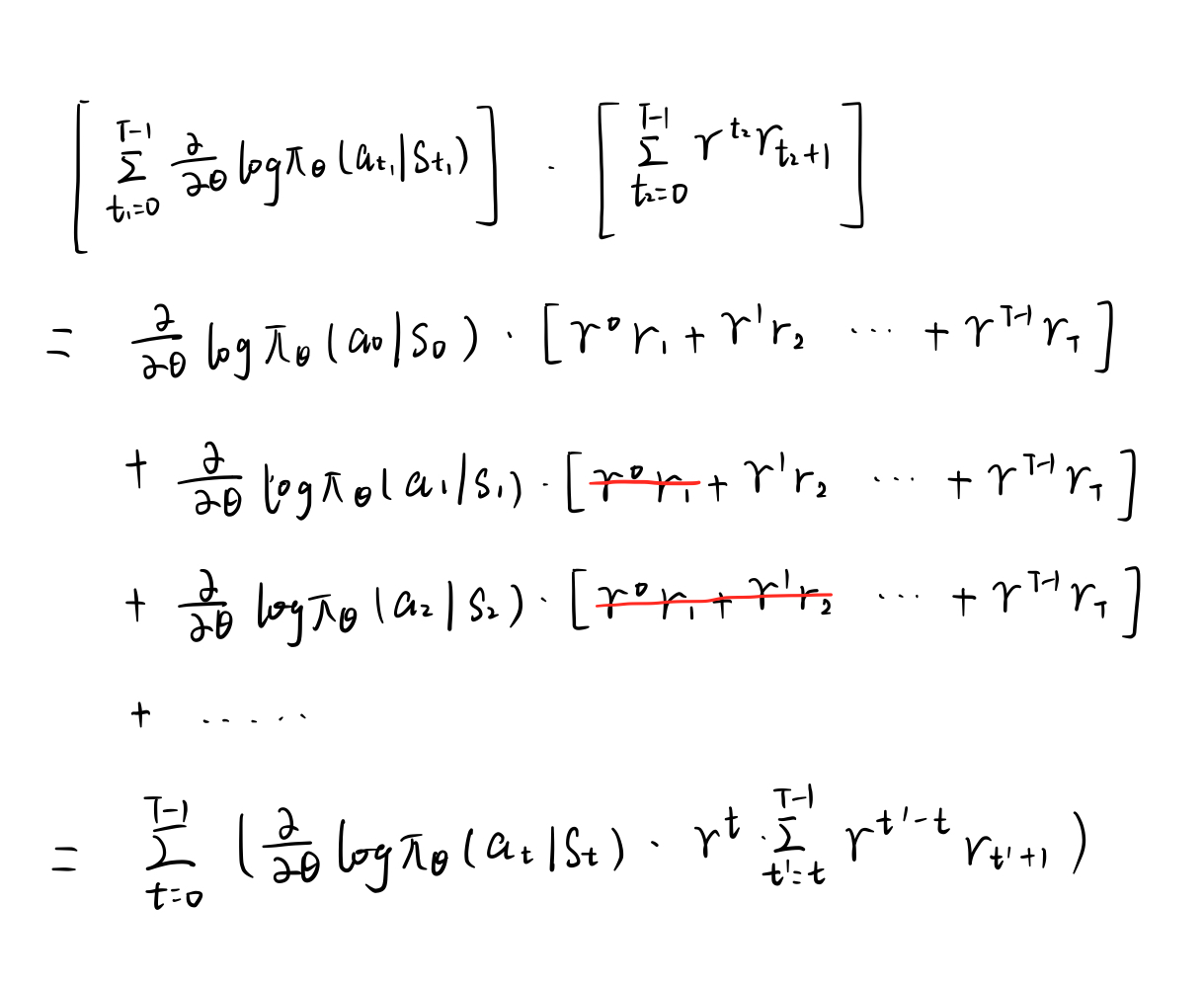 公式(1-5)证明
公式(1-5)证明
2 REINFORCE 算法
公式 (1-5) 中的 \(\nabla {J}(\theta)\) 是用期望表示的,期望可以通过采样的方法来近似。可以根据当前的策略 \(\pi _\theta\) 通过游走采集多条轨迹 \({\tau ^{\left( {\rm{1}} \right)}},{\tau ^{\left( 2 \right)}}, \ldots {\tau ^{\left( N \right)}}\). 其中一条轨迹 ${\tau ^{\left( n \right)}} = s_0^{\left( n \right)},a_0^{\left( n \right)},s_1^{\left( n \right)},a_1^{\left( n \right)}, \ldots $ 所以 \(\nabla {J}(\theta)\) 可以写成:
有了策略梯度的计算公式就可以更新梯度了:
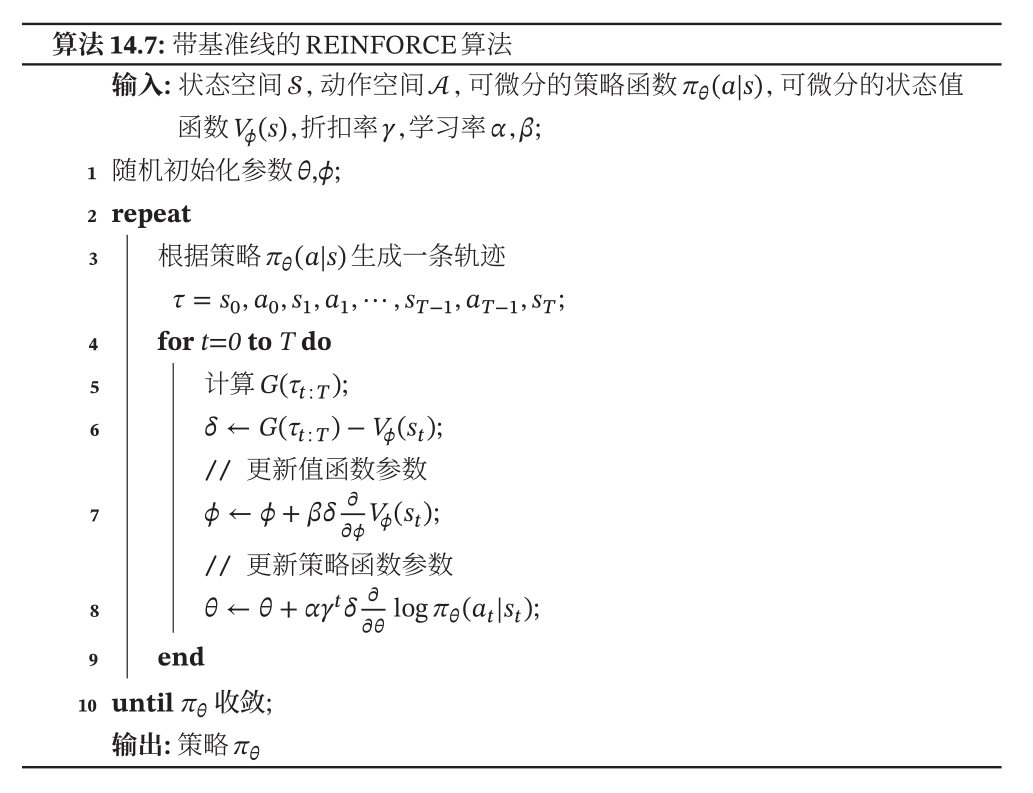
邱锡鹏老师书上的具体的算法如下:
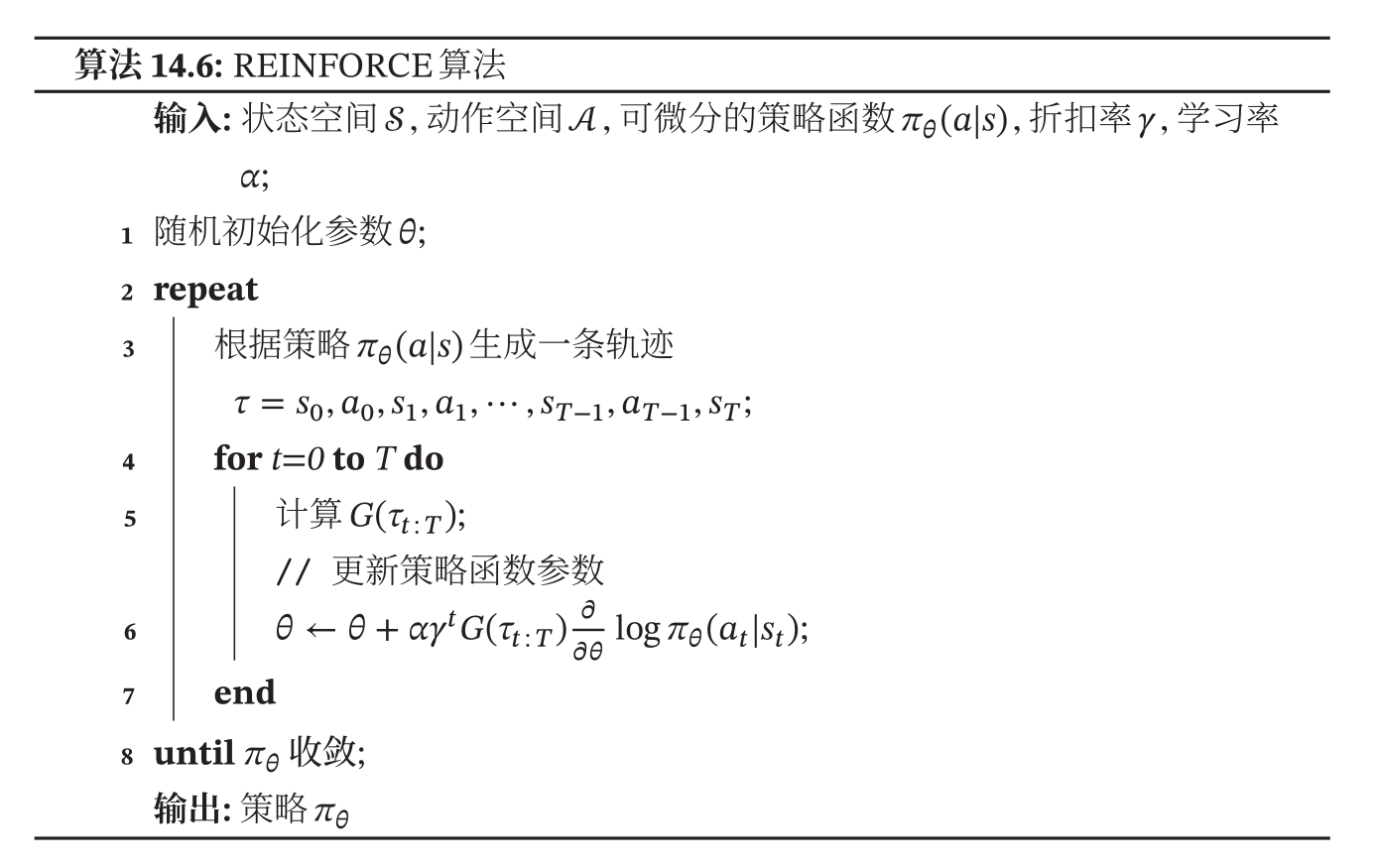
可以看出其实是每采集一条轨迹,计算每个时刻的梯度就开始更新参数了
3 带基准线的 REINFORCE 算法
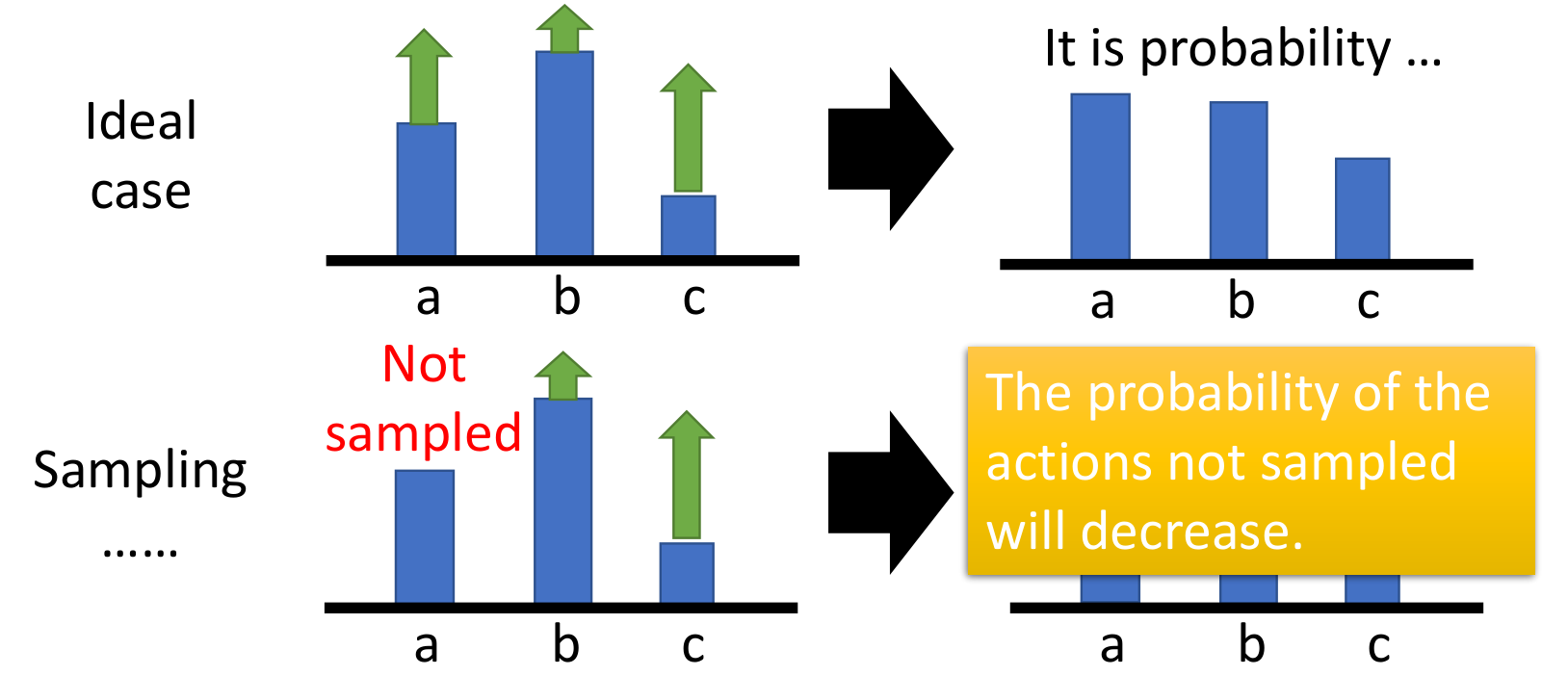
假如在状态 \(s_t\) 下有三个动作 \(a,b,c\),其概率之和为1。如果执行这个动作后得到正的总回报 \(G\left( \tau \right)\),则需要增大这个动作被选中的概率,如果得到负的总回报则减小其概率。
在理想情况下,三个动作都被采样到了,可以看出他们的总回报 \(G\left( \tau \right)\) 全都是正的值。然而这三个动作的总概率为1,所以被选中的概率不能全都增大,肯定是有的增大有的减小。所以只能哪个动作得到的总回报更多,就让它的概率大一点。
然而在实际中,不可能采样到所有的动作,假如动作 \(a\) 没被采到,动作 \(b,c\) 得到的回报都是正的值。这样在下一个回合选中动作 \(b,c\) 的概率都会上升,而选中动作 \(a\) 的概率会下降。但这并不代表动作 \(a\) 一定不好,只是没有采样到。
解决办法:减去一个固定值 \(b(s_t)\),让各个动作对应的奖励有正有负。一个常用的选择是令 \(b(s_t)\) 为这个状态的值函数 \({V^{{\pi _\theta }}}\left( {{s_t}} \right)\).
邱锡鹏老师的书上有证明\(^{[1]}\),虽然减去了一个和 \(s_t\) 相关的固定值,但是并没有影响 \(\nabla {J}(\theta)\),也就是说参数 \(\theta\) 更新的规则是不变的.
需要注意的两点是:
-
其实这个值函数 \({V^{{\pi _\theta }}}\left( {{s_t}} \right)\) 是不知道的,可以用监督学习的办法来做,用学习得到的函数 \({V_\phi }\left( {{s_t}} \right)\) 来近似表示 \({V^{{\pi _\theta }}}\left( {{s_t}} \right)\) . 另外 \(Loss \ function\) 定义为:
\[L\left( \phi \right) = {\left( {{V^{{\pi _\theta }}}\left( {{s_t}} \right) - {V_\phi }\left( {{s_t}} \right)} \right)^2} \tag{3-1} \] -
问题又来了,上面 \(Loss\) 的定义需要用到值函数 \({V^{{\pi _\theta }}}\left( {{s_t}} \right)\),但是我们又不知道值函数。先来看一下值函数的定义:
\[V^{\pi_{\theta}}\left(s_{t}\right)=\mathbb{E}\left[G\left(\tau_{t : T}\right)\right] \tag{3-2} \]实际上所采取的办法是用蒙特卡罗方法进行估计(用经验平均代替期望),在算法执行的时候好像更简便,直接用一次采样代表期望了。
有了上面两点,就可以对学习的函数 \({V_\phi }\left( {{s_t}} \right)\) 采用梯度下降法更新,参数 \(\phi\) 的梯度为:
有了这个基准线 \({V_\phi }\left( {{s_t}} \right)\) 就可以把策略函数的梯度公式 (2-1) 改写为:
在上面的第二点中关于这个 \(\mathbb{E}\left[G\left(\tau_{t : T}\right)\right]\) 的定义其实还有点疑问,邱锡鹏老师这个做法和李宏毅的做法不太一样,李宏毅是定义 \({Q^{{\pi _\theta }}}\left( {{s_t},{a_t}} \right) = \mathbb{E}\left[G\left(\tau_{t : T}\right)\right]\). 其实李宏毅课程中这么定义也是有道理的,因为这个 \(G\left(\tau_{t: T}\right)\) 其实是总回报,他是来衡量在状态 \(s_t\) 执行动作 \(a_t\) 后得到的总奖励,然后来判定这个动作 \(a_t\) 好不好。所以说这个动作是执行过了,才能得到 \(G\). 这个定义在后面
Actor-Critic还要用到,个人更偏向于李宏毅老师的定义。\(\left\{ \begin{array}{l} {V^{{\pi _\theta }}}\left( {{s_t}} \right) = \left[ {\left. {G\left( {{\tau _{t:T}}} \right)} \right|{s_t}} \right]\\ {Q^{{\pi _\theta }}}\left( {{s_t},{a_t}} \right) = \left[ {\left. {G\left( {{\tau _{t:T}}} \right)} \right|{s_t},{a_t}} \right] \end{array} \right.\)
下面来看一下具体的算法:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号