Auxiliary Learning by Implicit Differentiation
概
通过 implicit differentiation 优化一些敏感的参数.
AuxiLearn
-
在实际的训练中, 我们常常会通过一些额外的任务来帮助更好的训练:
\[\ell_{main} + \sum_{k} \phi_k \ell_{k}, \]其中 \(\phi_k \ge 0\) 是第 \(k\) 个额外任务 \(\ell_k\) 的系数.
-
比较常见的做法是通过 grid search 来选择合适 \(\phi_k\). 当额外任务的数量有效的时候尚可, 但是始终缺乏扩展性. 一种理想的方式通过某种可学习的方式设定.
-
但是很显然, 如果利用梯度下降学习 \(\phi_k\) 并通过 clip 保证 \(\phi_k \ge 0\), 一定会导致 \(\phi_k \equiv 0\) 这一平凡解.
问题设定
-
现在让我们来设定一个更加一般的问题:
\[\mathcal{L}_T(W, \phi) = \ell_{main}(W; \mathcal{D}_{train}) + h(W; \phi, \mathcal{D}_{train}), \\ \mathcal{L}_A(W) = \ell_{main} (W; \mathcal{D}_{aux}). \]其中 \(W \in \mathbb{R}^n\) 是模型中的基本参数, \(\phi \in \mathbb{R}^m\) 是一些其它的超参数, 然后 \(D_{train}, D_{aux}\) 表示训练集和额外的集合 (比如验证集).
-
不考虑 mini-batch, 合理的训练流程应该是:
\[W_{t+1} \leftarrow \arg \min_{W} \mathcal{L}_T(W; \phi_t) \\ \phi_{t+1} \leftarrow \arg \min_{\phi} \mathcal{L}_A(W_{t+1}(\phi)) \\ \]如此重复. 就能够避免 \(\phi\) 的平凡解.
-
当然, 如果每一次都严格按照两阶段计算, 计算量是相当庞大的 (比 grid search 也是不遑多让). 本文所提出来的 AuxiLearn 的改进就是提出了一种近似方法. 它的理论基础是 Implicit Function Theorem (IFT).
-
为了能够通过梯度下降的方式更新 \(\phi\), 我们首先需要推导出它的梯度:
\[\nabla_{\phi} \mathcal{L}_A = \underbrace{\nabla_W \mathcal{L}_A}_{1 \times n} \cdot \underbrace{\nabla_{\phi} W^*}_{n \times m}. \]显然, 其中 \(\nabla_W \mathcal{L}_A\) 是好计算的, 问题在于 \(\nabla_{\phi} W^*\) 的估计.
-
为了推导 \(\nabla_{\phi} W^*\), 我们需要用到 IFT. IFT 告诉我们, 对于一个连续可微映射 \(F(x, y): \mathbb{R}^{m} \times \mathbb{R}^n \rightarrow \mathbb{R}^n\). 在一定条件下, 如果存在 \(p \in \mathbb{R}^m, q \in \mathbb{R}^n\) 使得
\[F(p, q) = 0, \]则存在一个映射 \(\Phi: \mathbb{R}^m \rightarrow \mathbb{R}^n\) 使得
\[F(x, \Phi(x)) = 0 \]在某个集合上均成立.
-
现在, 让我们来推导. 首先 \(W^*\) 是 \(\mathcal{L}_T\) 的最优点, 当
\[\nabla_W \mathcal{L}_T(W^*, \phi) = 0, \]令 \(F\) 为 \(\nabla_W \mathcal{L}_T\), \(x\) 为 \(\phi\), \(y\) 为 \(W\), 套用 IFT, 可知, 存在 \(W^*(\phi)\) 使得
\[\nabla_W \mathcal{L}_T(W^*(\phi), \phi) = 0, \]在包含 \(\phi\) 的某个子集上都成立. 于是, 我们有
\[\nabla_{\phi} \nabla_W \mathcal{L}_T(W^*(\phi), \phi) = 0 \\ \Rightarrow \nabla_W^2 \mathcal{L}_T \cdot \nabla_{\phi} W^* + \nabla_{\phi} \nabla_W \mathcal{L}_T = 0 \\ \Rightarrow \nabla_{\phi} W^* = - (\nabla_W^2 \mathcal{L}_T)^{-1} \cdot \nabla_{\phi} \nabla_W \mathcal{L}_T. \] -
因此, \(\phi\) 处的梯度为:
\[\nabla_{\phi} \mathcal{L}_A = -\underbrace{\nabla_W \mathcal{L}_A}_{1 \times n} \cdot \underbrace{(\nabla_W^2 \mathcal{L}_T)^{-1}}_{n \times n}) \cdot \underbrace{\nabla_{\phi} \nabla_W \mathcal{L}_T}_{n \times m}. \] -
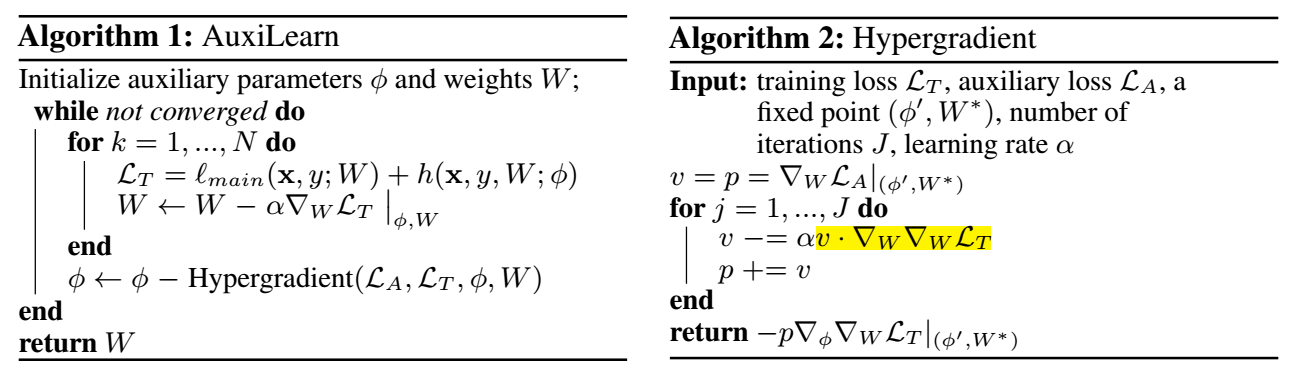
现在的问题是, 怎么估计 \((\nabla_W^2 \mathcal{L}_T)^{-1}\), 作者采用 Neumann series. Neumann series 告诉我们:
\[(I - X)^{-1} = \sum_{t} X^t \Rightarrow X^{-1} = (I - (I - X))^{-1} = \sum_{t} (I - X)^t. \]于是便得到了本文 AuxiLearn 算法 (算法 2 其实就是 Neumann series 的前 \(J\) 项):
理解两阶段的训练
-
让我们通过一个最简单的例子来理解:
\[\mathcal{L}_T(W, \phi) = \ell_{main}(W; \mathcal{D}_{train}) + \phi \cdot \ell_{aux}(W; \mathcal{D}_{train}). \] -
容易发现:
\[\begin{array}{ll} \frac{d \mathcal{L}_A}{d \phi} &= -\nabla_W \mathcal{L}_A \cdot (\nabla_W^2 \mathcal{L}_T)^{-1} \cdot \nabla_{\phi} \nabla_W \mathcal{L}_T \\ &= -\nabla_W \mathcal{L}_A \cdot (\nabla_W^2 \mathcal{L}_T)^{-1} \cdot \nabla_{\phi} (\nabla_W \mathcal{\ell}_{main}(\mathcal{D}_{train}) + \phi \nabla_W \ell_{aux}) \\ &= -\nabla_W \mathcal{L}_A \cdot (\nabla_W^2 \mathcal{L}_T)^{-1} \cdot \nabla_W^T \mathcal{\ell}_{aux}(\mathcal{D}_{train}) \\ &= -\nabla_W \mathcal{L}_{main}(\mathcal{D}_{aux}) \cdot (\nabla_W^2 \mathcal{L}_T)^{-1} \cdot \nabla_W^T \mathcal{\ell}_{aux}(\mathcal{D}_{train}). \\ \end{array} \] -
可以发现, \(\phi\) 逐渐增大的前提是:
\[\nabla_W \mathcal{L}_{main}(\mathcal{D}_{aux}) \cdot (\nabla_W^2 \mathcal{L}_T)^{-1} \cdot \nabla_W^T \mathcal{\ell}_{aux}(\mathcal{D}_{train}) > 0, \]即当主任务在 aux 集合上的更新方向和辅任务在训练集上在 \(\nabla_W^2 \mathcal{L}_T^{-1}\) 意义上方向一致.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号