How Powerful is Graph Convolution for Recommendation?
概
本文从 low-pass filters 的角度将经典的用于推荐系统的GCN, MF 模型进行了统一, 特别地, 给出了一个显式的求解方法, 无需训练.
这里的介绍结构和原文有些出入, 首先介绍基本的概念, 然后说明 smoothness 的重要性, 再介绍一些现有的 low-pass filters, 最后再给出本文所提出的 GF-CF.
符号说明
- \(u \in \mathcal{U}\), 用户;
- \(i \in \mathcal{I}\), item;
- \(n = |\mathcal{U}| + |\mathcal{I}|\);
- \(R \in \{0, 1\}^{|\mathcal{U}| \times |\mathcal{I}|}\), 交互矩阵;
- \(\bm{r}_u \in \{0, 1\}^{|\mathcal{I}|}\), 为 \(R\) 的第 \(u\) 行;
- 邻接矩阵,\[A = \left [ \begin{array}{cc} \bm{0} & R \\ R^T & \bm{0} \end{array} \right ] \in \{0, 1\}^{n \times n}; \]
- \(\mathcal{N}_k, k = 1,2, \cdots, n\), 为结点 \(k\) 所对应的邻居的集合;
- \(N_k = |\mathcal{N}_k|\);
- \(D_U := \text{Diag}(R \bm{1}) \in \{0, 1\}^{|\mathcal{U}|\times|\mathcal{U}|}, D_I := \text{Diag}(\bm{1}^T R) \in \{0, 1\}^{|\mathcal{I} \times |\mathcal{I}|}\), 对角线元素分别为 \(R\) 的行和 和 列和;
- \(D := \text{Diag} (A \bm{1}) \in \mathbb{R}^{n \times n}\);
- normalized rating matrix:\[\tilde{R} = D_U^{-\frac{1}{2}} R D_{I}^{-\frac{1}{2}} \in \mathbb{R}^{|\mathcal{U}| \times |\mathcal{I}|}; \]
- \(\tilde{\bm{r}}_u \in \mathbb{R}^{|\bm{I}|}\), 为 \(\tilde{R}\) 的第 \(u\) 行;
- \(\bar{\bm{r}}_u\) 是 \(\tilde{\bm{r}}_u\) 的某种变换后的结果;
- normalized 邻接矩阵,\[\tilde{A} = \left [ \begin{array}{cc} \bm{0} & \tilde{R} \\ \tilde{R}^T & \bm{0} \end{array} \right ] \in \mathbb{R}^{n \times n}; \]
- item-item normalized adjacency matrix:\[\tilde{P} = \tilde{R}^T \tilde{R} \in \mathbb{R}^{|\mathcal{I}| \times |\mathcal{I}|}; \]
- \(S \in \mathbb{R}^{|\mathcal{U}| \times |\mathcal{I}|}\), 每个用户给每个 item 的打分;
- \(\bm{s}_u \in \mathbb{R}^{I}\), 用户 \(u\) 对各 items 的打分情况.
主要内容
smoothness 的重要性
在开始部分内容之前, 请先了解 [LightGCN].
- LightGCN 根据内积 \(\bm{e}_u^T \bm{e}_i\) 进行预测, 并通过 BPR 进行训练;
- 下面定理给出了 1 层 LightGCN 的一个性质:
定理3.1: 令 \(N_{\max} = \max_i N_i, N_{\min} = \max_i N_i, \: i \in \mathcal{U} \cup \mathcal{I}\). 如果 \(E^{(0)} \in \mathbb{R}^{(|\mathcal{I}| + |\mathcal{U}|) \times d}\) 服从独立同分布的(单位球上)均匀分布(即, \(\|\bm{e}^{(0)}\|_2 = 1\))且
则对于一层的 LightGCN 有
其中 \(C\) 为常数,
互相干性 (mutual coherence): 矩阵 \(A \in \mathbb{C}^{d \times m}\)的各列满足 \(a_i^H a_i = 1\), 则矩阵 \(A\) 的互相干性定义为:
$$
M_A = \max_{1 \le i \not= j \le m} |a_i^H a_j|.
$$
注: 下面的互相干性是基于行的.
proof:
令
则
根据以下的引理:
引理8.1: 令 \(A \in \mathbb{R}^{n \times m}\), 每一行独立在单位球面上均匀采样, 则至少有 3/4 的概率使得
成立, 其中 \(C\) 为正常数.
于是,
$$
d > \frac{2C^2 N_{\max}^3 \log (|\mathcal{I}| + |\mathcal{U}|)}{N_{\min}},
$$
时, 有
成立 (3/4 概率).
此时,
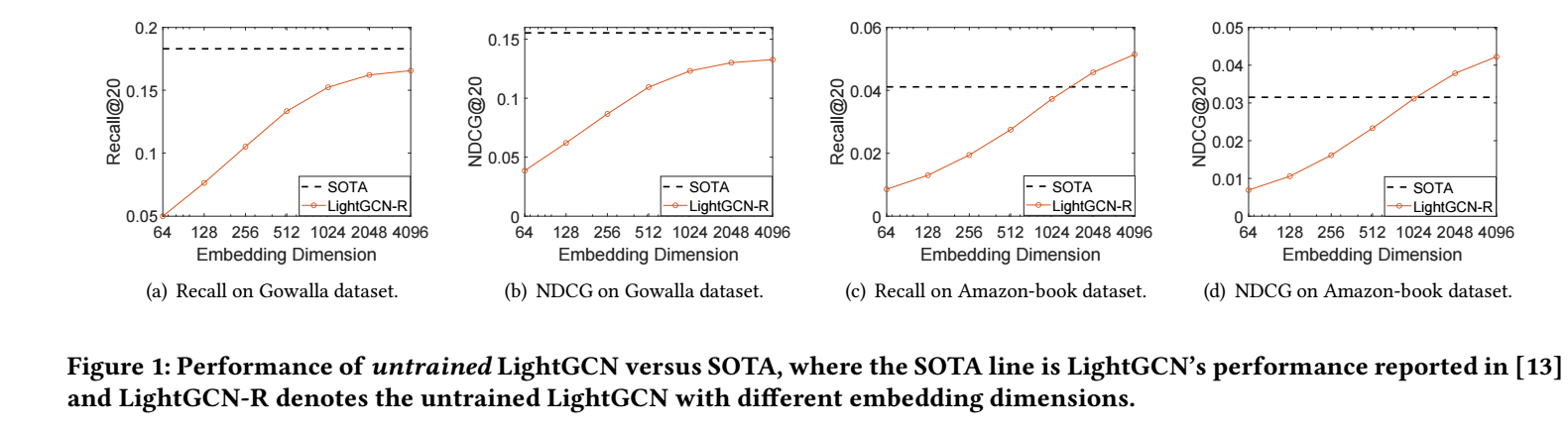
上面的定理告诉我们:
- 即使是随机初始化, 凭借聚合效应, 使得整个图平滑后也能产生不错的推荐效果 (训练集);
- 数据的密度越大, 所需的维度 \(d\) 也应当越大;
- 实际上概率 \(3/4\) 可以进一步提升以逼近概率 \(1\), 只是条件需要加强.
实际上, 可以通过如下的一个实验发现, 随着 \(d\) 的增加, 随机初始化的结果以及和用BPR训练的结果相媲美了.
极限的结果 (LGCN-IDE)
从上面的结果可以看出, \(d\) 越大, 拟合的结果越好, 那么 \(d \rightarrow +\infty\) 的情况是怎么样的呢?
定理3.2: 假设无约束 LightGCN 的 \(\bm{E}^{(0)} \in \mathbb{R}^{(|\mathcal{I}| + |\mathcal{U}|) \times d}\) 通过一个零均值, 非零房差的分布进行初始化, 则预测 score 为
其中 \(\beta_k\) 和 LightGCN pooling 各层特征的系数 \(\alpha_k\) 有关.
proof:
将 \(E^{(k)}\) 拆解为:
由此可得:
假设 \(X \in \mathbb{R}^{n \times d}, Y \in \mathbb{R}^{n \times d}\), 每一行都是独立同分布的, 则
其中 \(\bm{x}, \bm{y}\) 分别为 \(X, Y\) 的列向量.
于是, 观察 \(S\) 的展开式可以得到, \(U^{0}{V^{(0)}}^T\) 部分由于二者的独立性和零均值性质, 结果都是 \(\bm{0}\), 所以只剩下 \(U^{(0)}{U^{(0)}}^T\) 和 \(V^{(0)}{V^{(0)}}^T\). 经过整理可以得到:
Graph signal processing
-
定义图 \(\mathcal{G} = (\mathcal{V}, \mathcal{E})\);
-
令其邻接矩阵为 \(A \in \mathbb{R}^{n \times n}\);
-
graph signal 是一个函数, 定义为:
\[x: \mathcal{V} \rightarrow \mathbb{R}, \]将结点映射为数, 对于总共用 \(n\) 个结点的图来说, 就构成了一 \(n\)-维的向量 \(\bm{x} = [x(i)]_{i \in \mathcal{V}}\);
-
两个结点阶的梯度由下列公式定义:
\[(\nabla x)_{i, j} = \sqrt{A_{i,j}} (x_i - x_j); \] -
定义 graph signal 的光滑性为:
\[\mathcal{S}(\bm{x}) = \frac{1}{2} \|\nabla x\|_F^2 = \frac{1}{2} \sum_{i, j} A_{i, j} (x_i - x_j)^2 = \bm{x}^T L \bm{x}, \]其中 \(L := D - A\) 为 Laplacian 矩阵. 通常, \(\frac{S(\bm{x})}{\|\bm{x}\|_2}\) 越小说明整个 graph signal 越光滑;
-
当 \(L\) 是实对称矩阵的时候, 它可以特征分解为
\[L = U\Lambda U^T, \]其中 \(\Lambda = \text{Diag}(\lambda_1, \lambda_2, \cdots, \lambda_n), 0 \le \lambda_1 \le \lambda_2 \le \cdots \le \lambda_n\), \(U = [\bm{u}_1, \cdots, \bm{u}_n] \in \mathbb{R}^{n \times n}\) 为所对应的特征向量组;
-
根据特征分解的性质, 很容易发现:
\[\frac{\mathcal{S}(\bm{x})}{\|\bm{x}\|_2} \ge\frac{\mathcal{S}(\bm{u})}{\|\bm{u}\|_2}, \]这说明, 对应的特征值越小的 \(\bm{u}\), 其光滑性越好, 也就意味着更多的低频信号;
-
因为高频信号往往代表着噪声, 所以我们希望有一种特征变换 (low-pass filters) 以更好地保留低频信号.
-
在图卷积中, 通常模仿傅里叶变换, 构造如下形式的变换:
\[\mathcal{H}(L) := U\text{Diag}(h(\lambda_1), \cdots, h(\lambda_n)) U^T; \] -
倘若我们把不同的 \(\lambda_1\) 看成是不同的频率, 那么 \(h(\cdot)\) 就是反映了我们对不同频率的好恶; 于是, 所有的问题就是如何构造 \(\mathcal{H}(L)\) 以满足 low-pass filters.
item-item
我们考虑如下的问题:
- item-item (normalized) 邻接矩阵 \(\tilde{P} = \tilde{R}^T \tilde{R} \in \mathbb{R}^{|\mathcal{I}| \times |\mathcal{I}|}\);
- 定义 items 的一个 Laplacian 矩阵 \(\tilde{L} = I - \tilde{P}\);
- 将 \(\bar{\bm{r}}_u \in \mathbb{R}^{|\mathcal{I}|}\) (\(\tilde{\bm{r}}_u\) 的一个变换) 作为 items 的一个图信号;
- 进行如下的变换:\[\tag{13} \bm{\bar{s}}_u = \bar{\bm{r}}_u U\text{Diag}(h(\lambda_1), \cdots, h(\lambda_{|\mathcal{I}|})) U^T; \]
注: 把 \(\bar{\bm{r}}_u\) 看成是某个用户给予 items 的一个信号, 整个流程会好理解点.
几种不同的 low-pass filters
- Linear Filter\[h(\lambda_i) = \sum_{k=0}^K \alpha_k \lambda_i^k; \]
- Ideal Low-pass Filter:\[h(\lambda_i)= \left \{ \begin{array}{ll} 1, & \text{if } \lambda_i \le \bar{\lambda}; \\ 0, & \text{otherwise}. \end{array} \right . \]完全阻隔了高频信息;
- Opinion Dynamics:\[h(\lambda_i) = \frac{1}{1 + \tilde{\alpha} \lambda_i}. \]
与现有的方法的联系

low-rank matrix factorization
该方法旨在求解
注意到, 最优解是 \(U, V\) 分别 \(\tilde{R}\) 前 \(d\) 个最大的奇异值所对应的左右特征向量, 而 \(\tilde{R}\) 最大的恰恰就对于 \(\tilde{L}\) 最小 的那些特征向量 \(V\), 然后
注: 感觉不用像论文中加 \(D_I^{\frac{1}{2}}\).
注: 这里的 \(V\) 才是 (13) 中的 \(U\).
于是:
这里
即只保留最小的特征值所对应的特征向量.
这种处理处理方式, 实际上相当于采用 \(K \rightarrow \infty\) 层的 spatial convolution, 这会导致输出的结果 over-smoothing (这部分内容请回看原文), 所以并不是特别高效.
linear auto-encoders
这类的预测方式可以归结为
其中 \(B \in \mathbb{R}^{|\mathcal{I}| \times |\mathcal{I}|}\) 是可学习的参数.
训练目标是
作者考虑如下的情况 (\(\bar{\bm{r}} = \tilde{\bm{r}}\)):
此岭回归的结果为
由于对称性, 容易证明 \(\tilde{L} = I - \tilde{P}\) 的特征向量和 \(B^*\) 的特征向量是一致的, 故 (auto) 也可以转换成 (13) 的形式, 只是:
当 \(\mu > 1\), 这等价于一种 \(K \rightarrow \infty\), 同时对于系数为 \(-(-\frac{1}{\mu})^k\) 的 spatial convolution, 因为层数越深, 影响越小, 故 over-smoothing 的现象得以缓解.
neighborhood-based
这种方式采取
所对应的 'low'-pass filters 为
因为 \(0 \le \lambda_i \le 1\), 故实际上这个操作就是大小倒置.
LGCN-IDE
上面提及的 \(d \rightarrow \infty\) 的情形, 实际上等价于
这个含义就是比 neighborhood-based 的更加复杂一点.
GF-CF
通过前面的分析, 我们大概知道了如何构建 \(\mathcal{H}\), 作者通过结合 linear 和 ideal low-pass filters 给出了避免 over-smoothing 的方案:
这里 \(\bar{U}\) 是 \(\tilde{R}\) 的 top-\(d\) 奇异向量.
注: 感觉 linear 部分应该是 neighborhood-based 吧.
注: \(\alpha\) 是超参数.
代码
[official]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号