Zhao J., Mathieu M. & LeCun Y. Energy-based generative adversarial networks. ICLR, 2017.
概
基于能量的一个解释.
主要内容
本文采用了与GAN不同的损失, 判别器D和生成器G分别最小化下面的损失:
LD(x,z)=D(x)+[m−D(G(z))]+LG(z)=D(G(z))
需要注意的是, 这里的判别器D的输出已经不是普通GAN中判别器的真假概率了, 而是能量, 能量越低,即D(x)越小, 越真.
用V(G,D)=∫x,zLD(x,z)pdata(x)pg(z)dxdz, 用U(G,D)=∫zLG(z)pg(z)dz, 考虑如下纳什均衡
V(G∗,D∗)≤V(G∗,D),∀DU(G∗,D∗)≤U(G,D∗),∀G.
第一个需要考虑的问题是, 这样的纳什均衡解会有什么好的性质呢?
定理1: (G∗,D∗)为纳什均衡解, 则pG∗=pdata,a.e., V(G∗,D∗)=m.
proof:
V(G,D)=∫xD(x)pdata(x)dx+∫z[m−D(G(z))]+pG(z)dz=∫xD(x)pdata(x)dx+∫x[m−D(x)]+pG(x)dx.
故需要考虑
minD(x)pdata(x)+[m−D(x)]+pG∗(x),
可得
D(x)=⎧⎪⎨⎪⎩m,pdata<pG∗0,pdata>pG∗[0,m],else.
所以
V(G∗,D∗)=∫pdata<pG∗mpdata(x)dx+∫pdata>pG∗mpG∗(x)dx+∫pdata=pG∗G∗(x)pdata(x)dx≤m+m∫pdata<pG∗m[pdata(x)−pG∗(x)]dx≤m.
另一方面,
U(G,D∗)=∫xD∗(x)pG(x)dx≥∫xD∗(x)pG∗(x)dx
所以
V(G∗,D∗)≥∫x(D∗(x)+[m−D∗(x)]+)pG∗(x)dx≥m.
所以V(G∗,D∗)=m, 且pG∗=pdata,a.e.
下一个问题是, 这个纳什均衡存在吗, 文中的定理二给出了这个答案, 不过需要一个额外的条件, 这里不多赘述.
文中最后采用的是下面的框架:
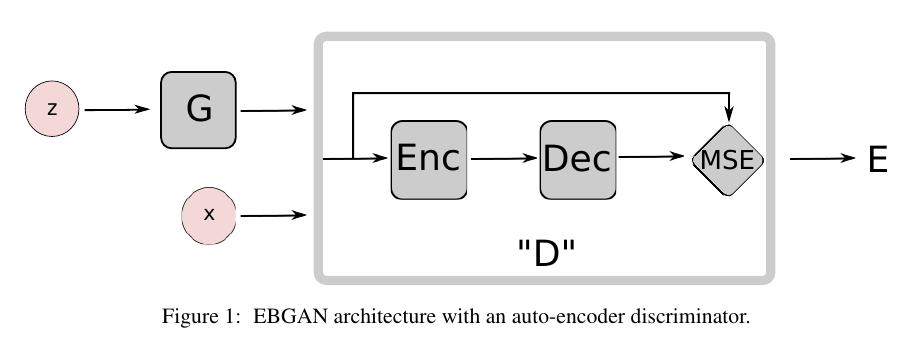
即能量函数D的选择为
D(x)=∥Dec(Enc(x))−x∥.



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· 【自荐】一款简洁、开源的在线白板工具 Drawnix