Dimension reduction in principal component analysis for trees
主要看了第一篇文章,第三篇也就是最开始的那篇的文章并没有细看(主要是有好多看不懂).
问题
PCA主要解决的是欧式空间中的问题,虽然kernel可以将其扩展到高维和非线性. 有一些数据,并不位于欧式空间之中,比如这三篇文章所重视的树形结构的数据,如何抓住这些数据的主干(拓扑结构?)是一个十分有趣的问题.
上图即为一种可以表示为树形结构的数据——血管,血管汇集处可以视为是一个树节点,当然树形数据会丢失很多细节,比如血管的粗细,长度等. 但是,因为这里我们只关注血管的拓扑结构(以后用结构代替,因为对拓扑不是很熟悉,用起这个词来总感觉心慌慌的), 所以我树形结构已经足够了.
现在再一次复述一遍我们的问题:
假设我们有数据集\(\mathcal{T}=\{t_i\}\), 每一个\(t_i\)即为一个树形结构的数据,我们希望找到一棵树或者一类树,使得其能抓住\(\mathcal{T}\)的主要结构.
很自然的一个问题是,因为不是在欧式空间中,我们无法利用距离来度量俩棵树之间的差距,所以我们首先需要一些定义.
重要的定义
距离
假设有俩棵树\(t_1,t_2\), 定义其距离为:
其中\(|\cdot|\)表示集合的基数,即有限集合内元素的个数.
距离需要满足下面三个性质:
只需证明第三个性质:
\(t_1, t_2, t_3\)都可以拆分成四份,以\(t_1\)为例,\(t_{11}\)只属于\(t_1\), \(t_{12}\)属于\(t_1, t_2\)但不属于\(t_3\), 类似有\(t_{13}\), 最后是\(t_{123}\)属于三者,那么:
比较便得证.
支撑树 交树
\(Supp(\mathcal{T})=\cup_{i=1}^n t_i\), \(Int(\mathcal{T})=\cap_{i=1}^nt_i\).
序
序,起着相当重要的作用,因为序相当于给\(t\)里面的元素进行了区分,如此我们才能对不同的树进行比较.
这篇文章的序是如此定义的:
- 根节点为0
- 假设所有节点的子孙数不超过\(k\), 则第\(i\)个节点的第\(j\)个子孙序为\(ki+j\).
容易证明,一棵树不会出现相同的序.
需要说明的子孙的排序,下面是文章中的一个例子:

这里\(k=4\),但是有些时候有点出乎意料:
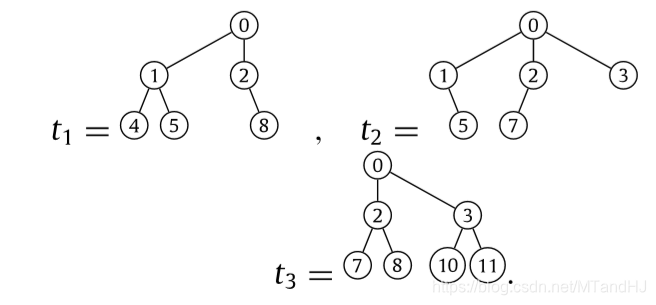
光看规则,\(t_2\)的5应该为4更加合适,但是因为文章关注的是结构,所以其认为5在右边,所以为5. 事实上这样比较合适,否则支撑树的构造就显得不合理了(因为不同的结构会有相同的序).
这也带来一个问题,如何安排,这些节点的位置,在另外一篇文章中有提及:


虽然觉得如此也并不靠谱,但是似乎也只有如此.
tree-line

下面的例子,接上面的\(t_1, t_2, t_3\):
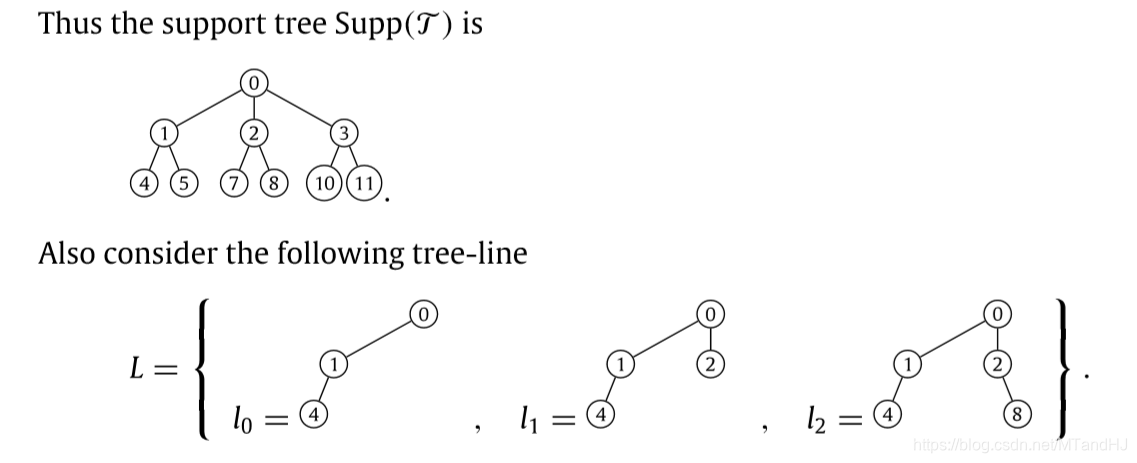
\(L\)中的\(l_0\)是预先给定的,给定方式有很多种,比如\(Int(\mathcal{T})\)等,注意到后面的添加2为0的后代,8为2的后代,所以相应的\(0-2-7\)等等也是可以的. 不必再往下扩展的原因是支撑树中没有相应的元素了.
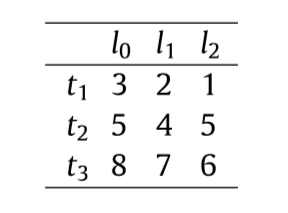
\(t_1, t_2, t_3\)到\(L\)的距离为:
如果我们有\(L_1, L_2\)俩条tree_lines, 我们可以定义:
我认为这是很有意思的一点,虽然可能不太高明,但是这就和欧式空间中的子空间类似了(虽然我们非常愚蠢地把子空间中的元素都表示了出来).
有了这个,我们利用距离就可以定义投影了:
我看到这的时候,觉得,有点粗暴,但是不错.
相应的\(L_1, L_2, \ldots\)也可以如此定义.
接下来有一个引理,这个引理有助于后面的分析,在此之前还需要定义path.
path
对于支撑树,从头节点到叶节点的每条路径均为一个path, 我们以\(\mathcal{P}\)来表示所有的path(除\(l_0\)之外), 显然每一条tree-line都可以用\(l_0\cup p, p\in \mathcal{P}\)来表示.
\(L_i^f, L_i^b\)


实际上\(L_k^f\)就是通过前向PCA所求得第k个的"载荷向量", 我认为这个定义是很自然的.
相应的还有后向的:
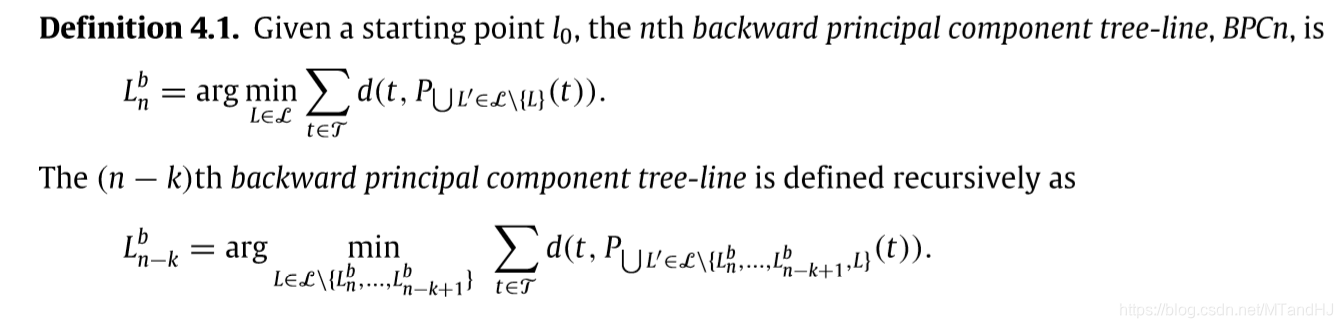
前向的方法,就是求我们所需要的成分,而后向的方法,就是求我们所舍弃的成分.
重要的性质
我会简单说明证明思路,细节回看论文.

因为\(L=l_0 \cup p_L\), 所以我们只需要考虑\(t\)和\(p_L\)即可,显然\(t \cap p_L\)是最合适的,否则,多一个点,\(|p_L \backslash t|\)会多1, 如果少一个点\(|t \backslash p_L|\)会多1.

这里我是这么思考的,假设\(L_1, \ldots, L_q\)互不相同(如果相同,则退化为不同), 则我们只需要考虑\(p_{L_1}, \ldots, p_{L_q}\), 上面所说的依然成立,只是增加的量为0或者1,但是不改变此时到达最小的事实.
定义权重:

其中\(\delta (v,t)=1, v\in t\).
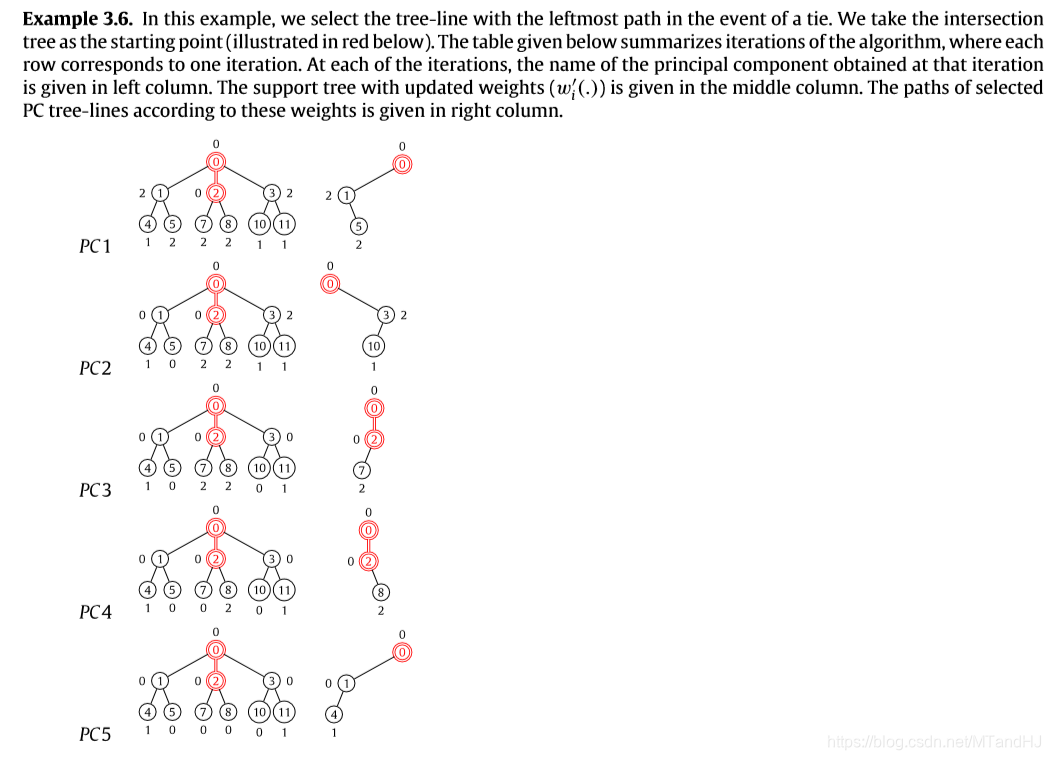
有前向算法:

和相应的定理:

即按照上面的算法,我们可以求出相应的\(L_k^f\).
这个算法可以这么理解:
我们的目标是找到以个tree_line, 使得树在其上(加上之前的tree-lines)投影的损失最少.
首先节点\(v\in l_0\),其权重为0,这是因为每个tree-line都有,
其次是节点\(v \in p_1^f \cup \ldots \cup p_{k-1}^f\),权重为0,这是因为,即便我们再一次选中的\(L\)中有此节点,新的子空间也不会因为这个节点带来损失的减少(因为已经有了)
最后是其它的节点,可以想象,如果我们选中了这个节点,那么没有一棵树\(t\), \(v \in t\), 就会带来2点的距离减少,所以其权重设置为上面的形式.
算法自然是选择\(p_L\)中的节点权重和最大的.
一个例子:
需要说明的是,这部分的证明我觉得是,就是正统的证明蛮有意思的.
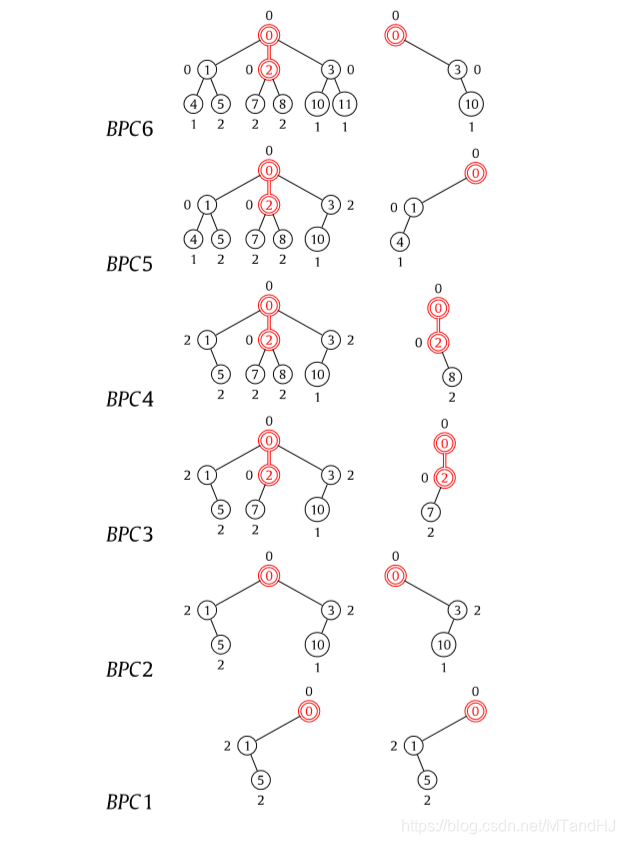
后向的方法:

相应的算法:


这么来理解权重的定义,首先,如果节点\(v \in l_0\), 那么权重自然为0,因为每个\(L\)都有,所以不会剩下的子空间造成影响, 另外,如果v在超过俩条路径上存在,那么显然,我们去掉任意一条都不会导致这个节点消失于剩余的子空间,所以权重为0.
其它的情况,即有影响的情况,那么舍弃\(v\)会直接导致包含\(v\)的树与子空间的距离+2,所以才会有上面的定义.
例子:
还有一部分是为了说明,前向和后向的一致性,这部分的证明我没看.

其它
看其数值实验,很大程度上是利用投影的距离来进行一些分类啊之类的操作. 直观上,这么设计似乎能够抓住树形数据的主干,只是,我总感觉哪里怪怪的. 但是是蛮有趣的,在普通的PCA中,也会遇到类似类别的0, 1, 2的数据,这些数据,虽然硬用也是可以的,但是应该也是有更好的方法去针对. 眼前一亮,但怪怪的...

 浙公网安备 33010602011771号
浙公网安备 33010602011771号