Proximal Algorithms 6 Evaluating Proximal Operators
需要注意的一点是,本节所介绍的例子可以通过第二节的性质进行延展.
一般方法
一般情况下proximal需要解决下面的问题:

其中\(x \in \mathbb{R}^n\), \(\mathcal{C} = \mathbf{dom} f\).
我们可以使用梯度方法(或次梯度)方法来求解, 还有一些投影方法, 内点法等等.
二次函数
如果\(f(x) = (1/2) x^TAx + b^Tx + c\), 其中\(A \in \mathbb{S}^n_+\),于是:
证:
设\(\varphi(x) = (1/2)x^TAx\), 根据第二节介绍的仿射性质可得:
又\(\partial \varphi=A\), 故得证.
特别的\(f(x) = b^Tx + c\)则\(\mathbf{prox}_{\lambda f}(v)=v-\lambda b\), \(f(x)=c\), \(\mathbf{prox}_{\lambda f}(v)=v\), 而当\(f(x)=(1/2)\|\cdot\|_2^2\)时:
这玩意儿有时候被称为压缩算子.
估计proximal operator的时候,需要求解一个线性方程组:
线性方程组怎么求解这里就不讨论了吧.
不过,这个应该多数用在\(f(x) + g(x)\)这种情况吧,因为如果单纯想要最小化\(f(x)\),直接可以求出显示解,所以可能是\(f(x) + |x|\)这种类型的?
平滑函数
文章里介绍了如何用梯度方法和牛顿方法,不提了.
标量函数
\(f: \mathbb{R} \rightarrow \mathbb{R} \cup \{+\infty\}\), 通过之前几节的介绍,这个情况还是蛮有意义的,因为通过proximal operator的可分性质等,有很好的扩展.
显然,此时,最优条件为:
比如:
又比如当\(f(x) = |x|\):

一般的标量函数
如果对于\(f\),其次梯度是可获得的,那么我们可以利用localization method来有效估计\(\mathbf{prox}_{\lambda f}\), 这种方法有点类似于二分法.
我们从\([l, u] \in \mathbf{dom} f\)开始, 如果\(v\)在区间之外,返回最靠近\(v\)的点?(应该就是挑\(\mathbf{dom} f\)中最靠经\(v\)的点作为边界吧) 算法会在\(u-l < \epsilon\)的时候终止.

注:上面的第一步的意思应该是如果\(v\)在区间里面就取\(v\),否则取中间的点.
如果\(g>0\),那么\(\varphi(z) \ge \varphi(x) + g(z-x)\), 显然,当\(z>x\)不是最优的,而\(z = x-\lambda g\)是一个下界. 为了说明这一点,假设\(h_z \in \partial f(z)\). 因为\(g>0, \lambda >0\), 所以\(z < x\),则\(h_z \le h\)(因为凸函数的次梯度是单调的), 令:
于是
等式右边是\(h_z-h\le0\), 所以新的\([l, u]\)就是一端小于0,一端大于0, 不过这对一开始的\(l, u\)有要求吧.
如果\(f\)是二阶连续可微的,那么,可以用guarded Newton方法来找\(x^*\),不理解曲中的缘由,贴个图吧.

多边形
这一小节,考虑投影至多边形的问题,多边形可以用 一系列线性方程和不等式描述:
其中\(A \in \mathbb{R}^{m \times n}, C = \mathbb{R}^{p \times n}\).
投影问题可以表示为(计算\(\mathbf{prox}\)便会遇到此问题):

对偶
当\(m, p\)都远小于\(n\)的时候,利用对偶方法是方便的.
(6.4)的对偶问题是:

其中\(v \in \mathbb{R}^m, \eta \in \mathbb{R}^p\)为对偶变量(上面的式子不难推出,这里不证了).
对偶问题是:
这是一个\(m+p\)个变量的二阶规划(QP)问题,且:
这个最优解的恢复是由KKT条件得来的.上面的问题,似乎可以用内点法有效解决,下次找机会再看看. 文章还提到了如何使得QP问题能够简单并行,这里便不多赘述了.
仿射集合
即
则:
其中\(A^{\dagger}\)是伪逆.
如果\(m<n, A\)满秩,那么:
这个我可以用一种比较麻烦的方法证明.
假设最优解为:\(v-A^T(AA^T)^{-1}(Av-b)+u\),因为
所以,根据线性方程组解的理论可知:
那么问题可以转换为:
再根据线性方程组的理论可知,\(u\)属于\(A\)的核,设:
其中\(U \in \mathbb{R}^{m \times k }, D \in \mathbb{R}^{k \times k}, V \in \mathbb{R}^{n \times k}\).
我们只要找出\(A^T(AA^T)^{-1}(Av-b)\)在核空间的投影即可:
即投影为0,也就是说\(x=0\), 这也就证明了
半平面
此时\(\mathcal{C} = \{x | a^Tx \le b\}\), 而:
其中\((u)_+=\max \{u, 0\}\).
这个可以画个图来证明,注意到\(\frac{(a^Tv-b)_+}{\|a\|_2^2}\)和点到直线距离的联系.
Box
box为如下形式\(\mathcal{C} = \{x | l \le x \le u\}\), 及:
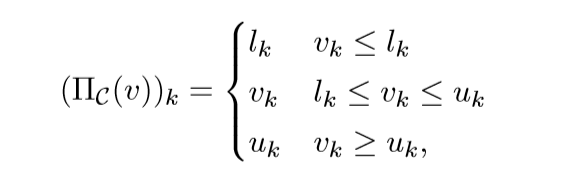
如果\(\mathcal{C}= \mathbb{R}^n_+\)则:
这个感觉是显然的.
Simplex
Simplex 为如下形式\(\mathcal{C} = \{z| z\ge 0, 1^Tz=1\}\), 及
对于某些\(\nu \in \mathbb{R}\).
满足
利用二分法可以求解.
Cones
令\(\mathcal{K}\)为锥,以及\(\mathcal{K}^*\)为其对偶锥. 那么问题为:
对偶锥的定义:
对偶最优条件为:

\(v=x-\lambda\)这个条件我是存疑的,这样子原问题应该是\(\frac{1}{2}\|x-v\|_2^2\),当然,这应该无伤大雅.
二阶锥

上面的东西,通过考虑下面的问题:
可以获得, 第二种情况是不需讨论的, 那么先来看第一种情况。
在\(t\le \|v\|\)的情况下,\(x=t\frac{v}{\|v\|}\), 不妨令\(u=\frac{v}{\|v\|}\).则,原问题为:
在\(t=\frac{\|v\|+s}{2}\)处取得极值,但是\(\|v\|\le-s\), 所以此时\(t\le0\), 所以\(t=0\). \(t >\|v\|\)的时候,\(x=v\),于是原问题为:
那么\(t=\|v\|\),显然没有0的时候小.
第三种情况的分析是类似的.
半正定锥
\(\mathcal{C} = \mathbb{S}^n_+\), 此时
其中\(\sum_{i=1}^n \lambda_i u_iu_i^T\)为特征分解.
指数锥
不了解,截个图吧


Pointwise maximum and supremum
max
如果\(f(x) = \max_{i} x_i\), 根据其上镜图,我们有等价形式:
其拉格朗日对偶形式为:
KKT条件为:

如果\(x_i^* < t^*\),则表示(通过第三个条件)\(\mu_i^*=0\), 如果\(x^*=t^*\),则表示\(u_i^*=(1/\lambda)(v_i-t^*)\), 又\(\mu_i^* \ge 0\), 总结为:
再根据第五个条件可得:
这个可以用半分法求解,初始的区间为\([\min_i v_i -(1/n), \max_i v_i]\).
最后
support function
\(\mathcal{C}\)是一个凸集,其support function为:
support function的共轭是指示函数.
通过Moreau 分解我们知道:
一个例子是\(f(x) = x_{[1]}+x_{[2]}+\ldots + x_{[k]}\), 表\(x\)的前k个最大的和,可以用以下凸集的support function来表示:
Norms and norm balls
\(f=\|\cdot\|\)为一般的定义在\(\mathbb{R}^n\)上的范数,则\(f^*=I_{\mathcal{B}}\), 其中\(\mathcal{B}\)为对偶范数的单位球.
我们知道\(f(x)=\sup_y \{y^Tx|\|y\|_*\le 1\}\), 此为\(\mathcal{B}=\{y | \|y\|_*\le 1\}\)的支撑函数,故\(f^*=I_{\mathcal{B}}\).
对偶不是共轭的特例?
于是根据Moreau分解,有以下式子成立:

Euclidean 范数
当\(f = \|\cdot\|_2\)的时候:

以及:

\(\ell_1\) and \(\ell_{\infty}\) norms
\(\ell_{\infty}\)的\(\mathcal{B}\)是box,所以根据之前讨论过的:

引文\(\ell_1\)和\(\ell_{\infty}\)互为对偶,所以当\(f=\|\cdot\|_1\)的时候:

可以用更为紧凑的形式表示:
欲计算\(\ell_{\infty}\)的proximal operator并不容易,因为投影到\(\ell_1\)的单位球比较麻烦.
我们需要计算一个\(\lambda\),满足:
可以用类似半分法的方法求解.
Elastic net
\(f(x) = \|x\|_1 + (\gamma/2) \|x\|_2^2\), \(\gamma > 0\).
此时
范数和
其中\(\mathcal{G}\)是\([n]\)的一个分割, 则:
sublevel set and epigradph
下水平集
\(f\)的\(t-\)下水平集合为:
假设\(v \not \in \mathcal{S}\) , 否则\(\Pi_{\mathcal{S}}(v)=v\).
此时\(\Pi_{\mathcal{S}}(v)\)可以转化为下列问题:
通过KKT条件可得最优条件为:
第一个条件,表示\(\Pi_{\mathcal{S}}(v) = \mathbf{prox}_{\lambda f}(v)\), 再根据第二个条件可得:
我们可以通过二分法来寻找\(\lambda\).
上镜图
函数\(f\)的上镜图为:
针对\(\Pi_{\mathbf{epi} f}(v, s)\):
同样假设\(f(v) > s\)KKT条件为:
所以
论文说这个问题比较难成立,有另外一种表示方法:

不知道怎么推的.
Matrix functions
Elementwise functions
这里将矩阵\(A \in \mathbb{R}^{m \times n}\)视为\(\mathbb{R}^{mn}\)的向量,就能利用之前的方法了,比如\(\ell_1\)的方法:
正交不变
函数\(F: \mathbb{R}^{m \times n} \rightarrow \mathbb{R}\),正交不变是指:
其中\(U \in \mathbb{R}^{n \times n}, V \in \mathbb{R}^{m \times m}\)为正交矩阵, 这也意味着:
其中\(\sigma_s:\mathbb{R}^{m\times n }\rightarrow \mathbb{R}^{\min\{m, n\}}\)是奇异值映射.
正交不变算子\(F\)可以表示为:\(f \circ \sigma_s\), 而
其中\(X= V\mathbf{diag}(\sigma_s(X))U\). 这个的推导见之前关于矩阵次梯度的介绍.
这意味着:
这个没依照论文来,论文似乎有更加直接的证明方法,我来讲一下我的:
最优条件为:
假设\(X= V\mathbf{diag}(\sigma_s(X))U\), 则:
显然\(A\)的奇异值分解也为:
而
其最优条件为:
显然二者的最有条件是一样的,所以成立.
当\(F: \mathbb{S}^n \rightarrow \mathbb{R}\), 且\(F(UXU^T)=F(X)\):
其中\(A=U\mathbf{diag}(\sigma(A))U^T\).
后面还有一些关于矩阵范数,一些特殊集合的投影,以及如何求解对数障碍问题.


 浙公网安备 33010602011771号
浙公网安备 33010602011771号