import numpy as np
import matplotlib
import matplotlib.pyplot as plt
import matplotlib.animation as animation
a = []
b = []
path_len = 0
def update_points(num):
point_ani.set_data(a[num], b[num])
xdata.append(a[num])
ydata.append(b[num])
if num % path_len==0:
xdata.clear()
ydata.clear()
# if num % 5 == 0:
# # point_ani.set_marker("*")
# point_ani.set_markersize(12)
# elif num % 2== 0:
# # point_ani.set_marker("o")
# point_ani.set_markersize(8)
# else:
# point_ani.set_markersize(5)
#text_pt.set_position((a[num], b[num]))
#text_pt.set_text("x=%.3f, y=%.3f" % (a[num], b[num]))
point_ani.set_data(ydata, xdata)
return point_ani, #text_pt,
import numpy as np
from heapq import heappush, heappop
import random
from PIL import Image
import matplotlib.pyplot as plt
def heuristic_cost_estimate(neighbor, goal):
x = neighbor[0] - goal[0]
y = neighbor[1] - goal[1]
return abs(x) + abs(y)
def dist_between(a, b):
return (b[0] - a[0]) ** 2 + (b[1] - a[1]) ** 2
def reconstruct_path(came_from, current):
path = [current]
while current in came_from:
current = came_from[current]
path.append(current)
return path
# astar function returns a list of points (shortest path)
def astar(array, start, goal):
directions = [(0, 1), (0, -1), (1, 0), (-1, 0)]#, (1, 1), (1, -1), (-1, 1), (-1, -1)] # 8个方向
close_set = set()
came_from = {}
gscore = {start: 0}
fscore = {start: heuristic_cost_estimate(start, goal)}
openSet = []
heappush(openSet, (fscore[start], start)) # 往堆中插入一条新的值
# while openSet is not empty
while openSet:
# current := the node in openSet having the lowest fScore value
current = heappop(openSet)[1] # 从堆中弹出fscore最小的节点
if current == goal:
return reconstruct_path(came_from, current)
close_set.add(current)
for i, j in directions: # 对当前节点的 8 个相邻节点一一进行检查
neighbor = current[0] + i, current[1] + j
## 判断节点是否在地图范围内,并判断是否为障碍物
if 0 <= neighbor[0] < array.shape[0]:
if 0 <= neighbor[1] < array.shape[1]:
if array[neighbor[0]][neighbor[1]] == 1: # 1为障碍物
continue
else:
# array bound y walls
continue
else:
# array bound x walls
continue
# Ignore the neighbor which is already evaluated.
if neighbor in close_set:
continue
# The distance from start to a neighbor via current
tentative_gScore = gscore[current] + dist_between(current, neighbor)
if neighbor not in [i[1] for i in openSet]: # Discover a new node
heappush(openSet, (fscore.get(neighbor, np.inf), neighbor))
elif tentative_gScore >= gscore.get(neighbor, np.inf): # This is not a better path.
continue
# This path is the best until now. Record it!
came_from[neighbor] = current
gscore[neighbor] = tentative_gScore
fscore[neighbor] = tentative_gScore + heuristic_cost_estimate(neighbor, goal)
return False
if __name__ == "__main__":
#mapsize = tuple(map(int, input('请输入地图大小,以逗号隔开:').split(',')))
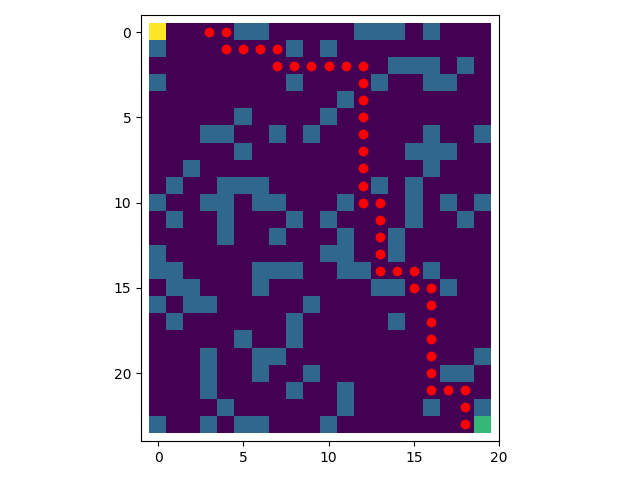
mapsize = (24,20)
nmap = np.zeros(mapsize, dtype=np.int)
map_weight = nmap.shape[0]
map_height = nmap.shape[1]
# 定义起点和重点
start_node = (0,0)
end_node = (map_weight-1,map_height-1)
# 随机生成地图
for i in range(int(0.25*map_weight*map_height)):
xi = random.randint(0, map_weight-1)
yi = random.randint(0, map_height-1)
nmap[xi][yi] = 1
print(nmap)
nmap[start_node] = 0
nmap[end_node] = 0
path = astar(nmap, start_node, end_node) # 用A星算法生成路径
path_len = len(path)
for i in range(path_len):
# nmap[path[i]] = 4 #设置路径的颜色
a.append(path[i][0])
b.append(path[i][1])
nmap[start_node] = 3 #设置开始点的颜色
nmap[end_node] = 2 # 设置终点的颜色
print(a)
print(b)
plt.scatter(b,a)
# 绘制路径
img = np.array(nmap)
plt.imshow(img)
# plt.axis('off')
# 动画演示
xdata = []
ydata = []
fig = plt.figure(tight_layout=True)
point_ani = plt.axes(xlim=(-1, mapsize[1]), ylim=(mapsize[0], -1))
point_ani, = plt.plot(ydata,xdata, "ro")
#text_pt = plt.text(4, 0.8, '', fontsize=16)
im = plt.imshow(img)
ani = animation.FuncAnimation(fig, update_points, np.arange(0,len(a)-1), interval=100, blit=True)
# ani.save('sin_test3.gif', writer='imagemagick', fps=10)
plt.show()