IR2104详解
目录
引入:IR2104是我上手的第一个半桥栅极驱动芯片,使用两片IR2104就可以搭建一个全桥电路控制电机的正反转。然而由于不懂其中原理,在后续电路设计中出现了许多bug,这篇文章作为一个经验总结,也作为一个新手教程,从MOS管的工作原理深入讲解IR2104电路设计。
0、基础知识
IR2104是一颗半桥栅极驱动芯片(控制 构成半桥的MOS管的栅极的芯片),所以在介绍IR2104之前,我们先了解一下MOS管和半桥是什么。
0.1、NMOS原理
关于MOS管的介绍,推荐B站工科男孙老师的视频 NMOS的介绍
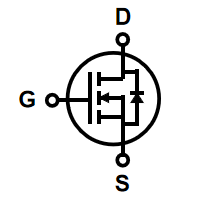
这里仅简单介绍一下,NMOS有三个引脚,分别为G(栅极)、S(源极)、D(漏极),当DS之间有电势差且GS间电压大于开启电压Vth时,NMOS完全导通。用公式表示就是Vgs > Vth。
可以简单理解为:当 G(栅极)电压 大于 S(源极)电压 时,NMOS导通。
0.2、半桥控制原理
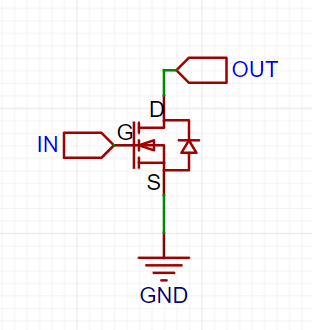
一个NMOS构成的开关电路(如下图)只能输出低电平或高阻态(称为开漏输出),不能输出高电平。
于是我们再接入一个NMOS来控制高电平的接入(如下图)。
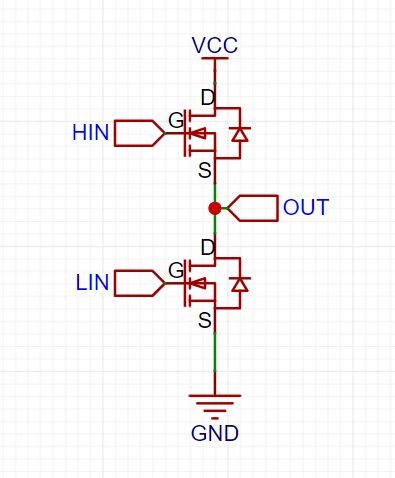
这时我们将连接高电平的MOS叫上管,连接低电平的MOS叫下管,通过控制上下管的导通,就可以控制高低电平的输出。
HIN=1、LIN=0 时,上管导通下管截止,输出高电平;
HIN=0、LIN=1 时,上管截止下管导通,输出低电平;
HIN=0、LIN=0 时,上管截止下管截止,输出高阻态;
HIN=1、LIN=1 时,上下管均导通,短路!!!。
看起来这个电路很完美,但需要注意的是,要控制上管导通,需要VHIN > Vout,而在上管导通时,Vout≈Vcc,也就是说,VHIN需要大于Vcc才能使上管导通,如何获取一个大于Vcc的电压是第一个问题。在MOS开关过程中,如何防止短路的发生是第二个问题。
幸运的是,上面两个问题都可以通过使用栅极驱动芯片来解决,下面我们就进入正题—IR2104芯片。
(请牢记上面的两个问题)
1、IR2104简介
IR2104 是一款高压、高电流、半桥驱动器,用于驱动功率 MOSFET 和 IGBT。内部集成死区控制电路和shutdown功能。
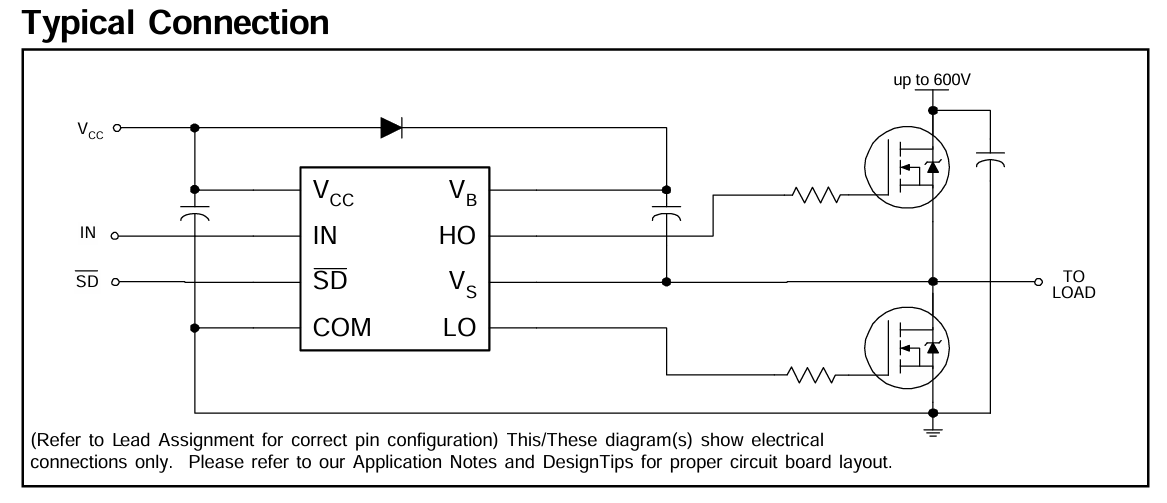
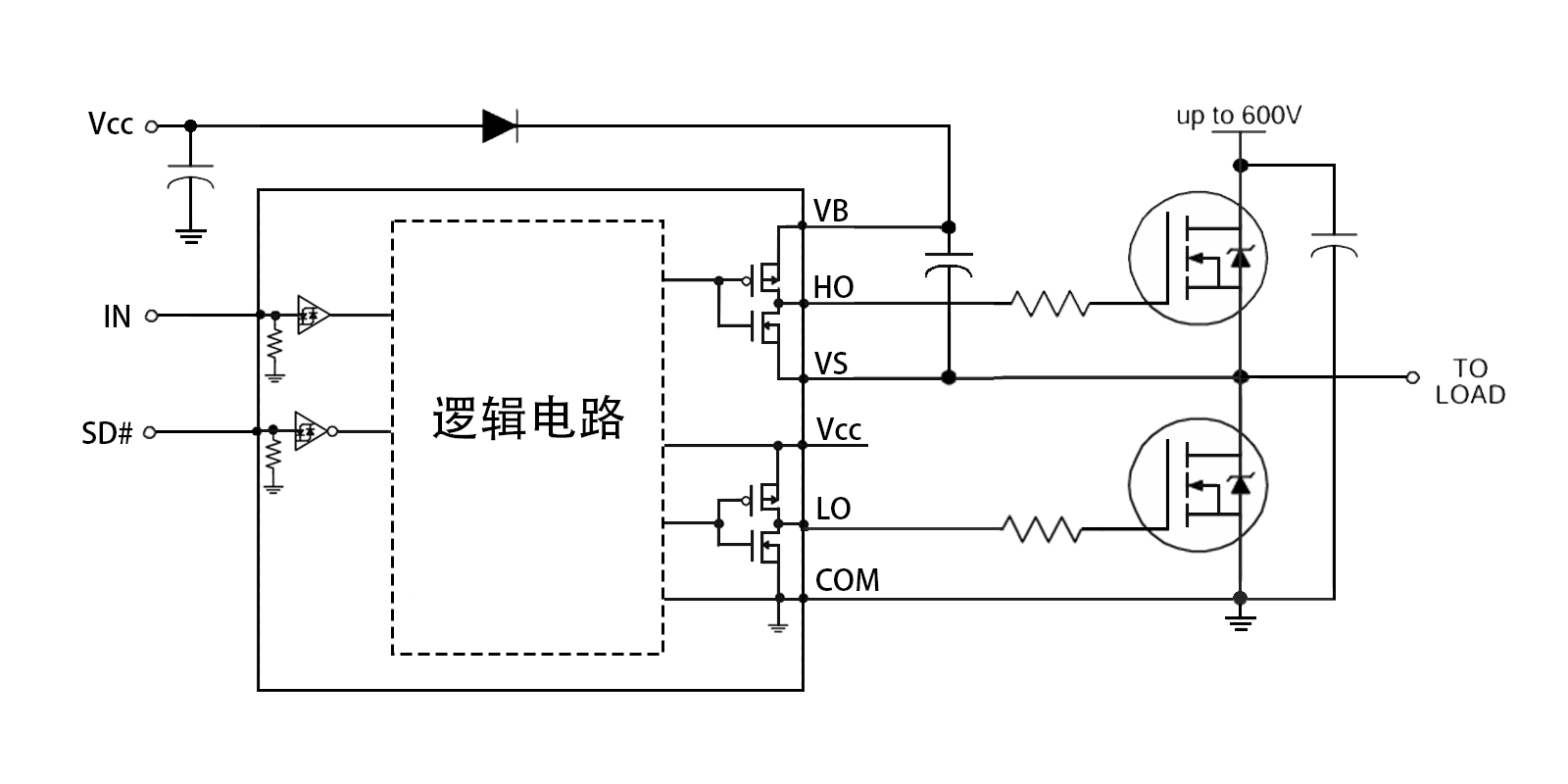
1.1、示例电路
1.2、引脚定义
| 序号 | 引脚缩写 | Description | 引脚功能 |
|---|---|---|---|
| 2 | IN | Logic input for gate driver outputs (HO and LO), in phase with HO |
逻辑输入,控制HO和LO引脚的输出, 与HO同相位 |
| 3 | SD# | Logic input for shutdown | 逻辑输入,低电平芯片停止工作 |
| 8 | Vb | High side floating supply | 高端浮动供电 |
| 7 | HO | High side gate drive output | 高端栅极驱动输出 |
| 6 | Vs | High side floating supply return | 高端浮动供电回流 |
| 1 | Vcc | Low side and logic fixed supply | 低端固定供电,逻辑电路供电 |
| 5 | LO | Low side gate drive output | 低端栅极驱动输出 |
| 4 | COM | Low side return | 低端回流,公共地 |
引脚可以分为两类
- 逻辑引脚
- IN引脚控制栅极驱动引脚HO和LO的输出,且HO电平与IN相同,LO电平与IN相反
- SD#引脚控制芯片工作与否,“#”表示低电平有效,即SD为低电平时芯片停止工作
- 驱动引脚
- VB/HO/VS 可看作一组驱动引脚,驱动高端NMOS
- Vcc/LO/COM 是一组驱动引脚,驱动低端NMOS
在引脚的英文释义中,出现了 floating 和 fixed 两个单词,意为“浮动”和“固定”,分别描述了高端和低端的驱动引脚。
此处点出,后文解释。
2、电路原理详解
还记得开头的两个关键问题吗,来回顾一下
- 第一个问题:如何获取一个大于Vcc的电压
- 第二个问题:如何防止短路的发生
解决这两个问题的方法对应两个新的名词—自举升压、死区控制
在学习它们之前,我们先搞一个图,便于分析芯片内外电路的工作过程(如下图)
2.1、自举升压
自举,顾名思义就是自己把自己举起来,主要通过一个电容和一个二极管来实现。
先做一个小实验,现在有一个5V电源和一个电解电容,将电源与电容并联,此时电容充电,两端电压等于5V;在将电容取下,将电容的负极与电源正极连接,测量电源负极与电容正极之间的电压。可以看到测量结果为10V。
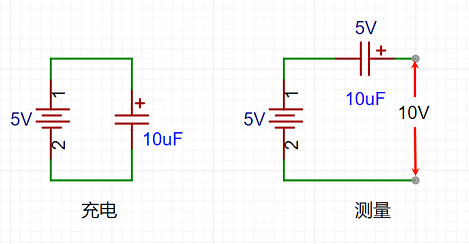
这就是自举的含义,将自己的能量先聚集到电容,再将能量叠加,实现电压的升高。
我们来看一下自举电路实际中的工作过程。(注:HO,LO的输出也是由内部mos控制的)
-
当IN输入0时,LO与Vcc导通,下管导通;HO与VS导通,上管截止。同时电流从Vcc经二极管向自举电容充电。
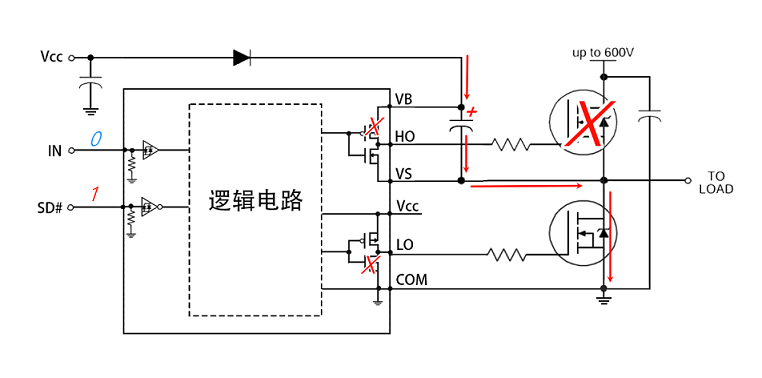
-
当IN输入1时,LO与COM导通,下管截止;HO与VB导通,此时自举电容正极相当于连接HO,电容正极电压=Vbat+Vcc,同时二极管防止了电流倒灌回Vcc,上管得以导通。
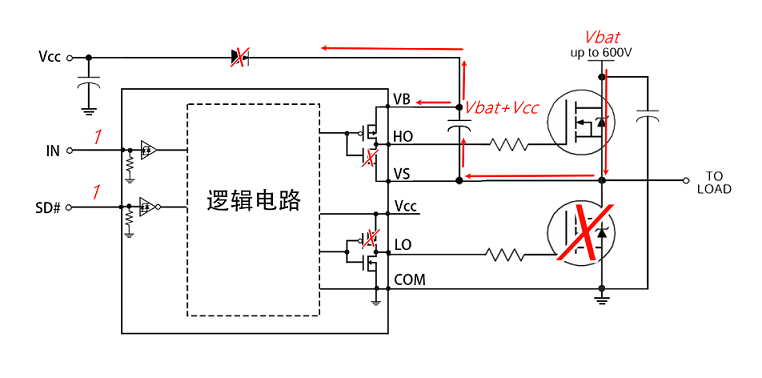
但这并不是一劳永逸的(一次充电,终身导通),自举电容的容值取决于电路的控制频率和NMOS的栅源电容,所以不会很大,且驱动mos时会有些许漏电,所以需要不断的重复上述过程给电容充放电才可以维持mos的导通电压。
下面我们再来做一个实验,取一个IR2104模块,上电后给IN输入高电平,会发现上管输出只能维持一小段时间,需要IN输入低电平后再次给高电平才能恢复上管的导通。
上文的两个英语单词(floating、fixed)在这里可以解释一下了。
- floating 意为浮动,很形象地描述了上管的驱动供电,自举电容就像一条小船,其正极电压跟随Vbat水涨船高,飘忽不定,表示一种不确定性。
- fixed 意为固定,与floating对比就很好理解了,下管的驱动供电是Vcc,固定不变。
2.2、死区控制
死区,顾名思义“死掉的区间”。
为了防止控制过程中上下管MOS同时导通,芯片内部为控制输出信号添加了“死区”,即两个MOS均不导通的区间。
不添加死区的波形图长这样

添加死区的波形图长这样
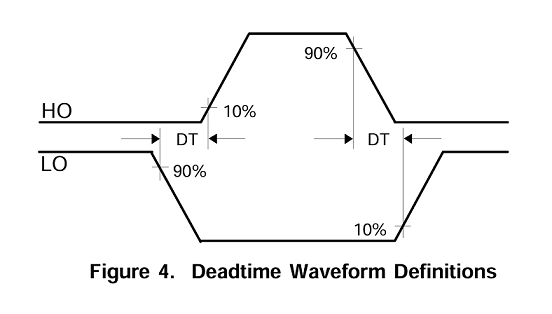
可见无死区时,半桥在切换输出状态时,上下管会同时处于不完全导通状态。这种现象轻则影响输出不稳定、功耗增加,重则导致mos发热甚至短路烧毁。
而加入死区后,半桥在切换输出状态时,会先确保上下管均处于截止状态,之后在进行切换。
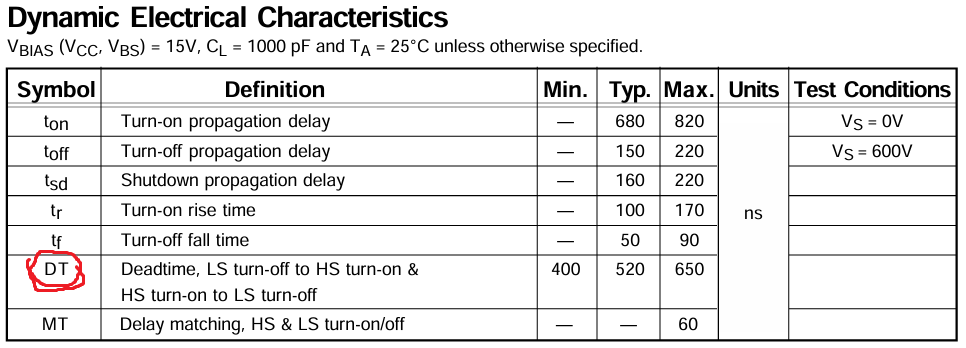
结合下图数据表可知,DT的取值在400~650ns之间,这个参数可以作为MOS选型的依据。
MOS管的内电容是指沟道和栅极之间的电容,而外电容则是指沟道和外部环境之间的电容。这两个电容在切换过程中会影响电荷传输速度,从而对死区时间产生影响。一般来说,较大的内外电容会导致更长的死区时间,而较小的内外电容则会缩短死区时间。因此,在设计MOS管电路时,我们应尽量减小内外电容的大小,以减小死区时间。——from百度文库
3、总结
OK,至此,你已经掌握了IR2104的关键知识点,我们来整理一下
- 首先,IR2104是一颗半桥驱动芯片,而半桥是由两颗NMOS构成的,所以我们先了解了NMOS的导通条件 和 半桥的控制原理。但是控制过程遇到了两个问题,上管导通所需的高电压和控制过程的防短路。
- 之后,在这两个问题的基础上,我们在IR2104上找到了对应对解决方案,自举升压 和 死区控制,明白了使用栅极驱动芯片的原因和必要性。
- 最后,其实这篇文章里还有诸多问题没有深入讲解,如自举电容的容值、限流电阻的阻值以及如何搭建靠谱的电机驱动电路,这些就在下一篇(wait for me)。
作者
博客园@L-Q

 浙公网安备 33010602011771号
浙公网安备 33010602011771号