

STM32CUBEIDE平台下STM32L4移植MPU9250 MPL库+FreeRTOS
芯片选用:STM32L431CCT6
IMU:MPU9250
平台:STM32CUBEIDE 1.7.0
1.功能配置
step1:配置调试接口与时钟

step2:配置调试串口与IIC
使用USART2作为调试口

使用模拟IIC作为MPU9250的IIC通讯方式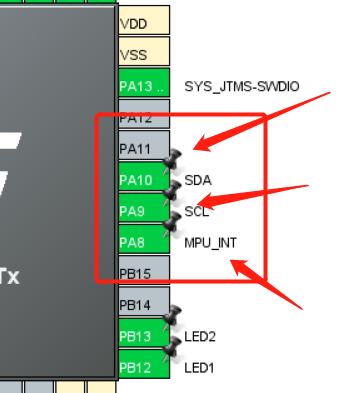
具体参考:https://www.cnblogs.com/Lxk0825/p/15358846.html
step3:freeRtos配置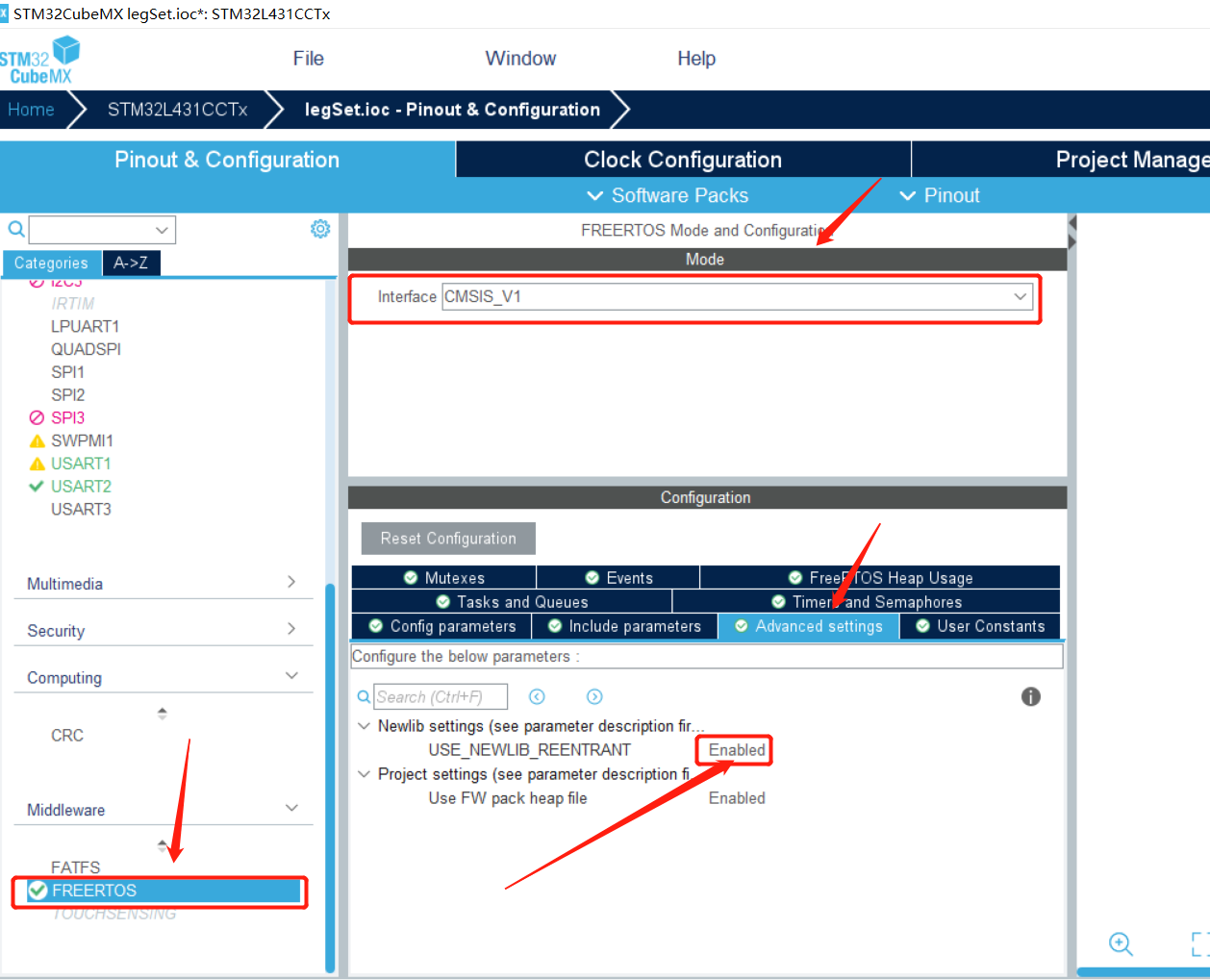

添加一个任务:


之后保存 生成代码即可
2.移植MPL库
step1:去官方网站下载MPL库
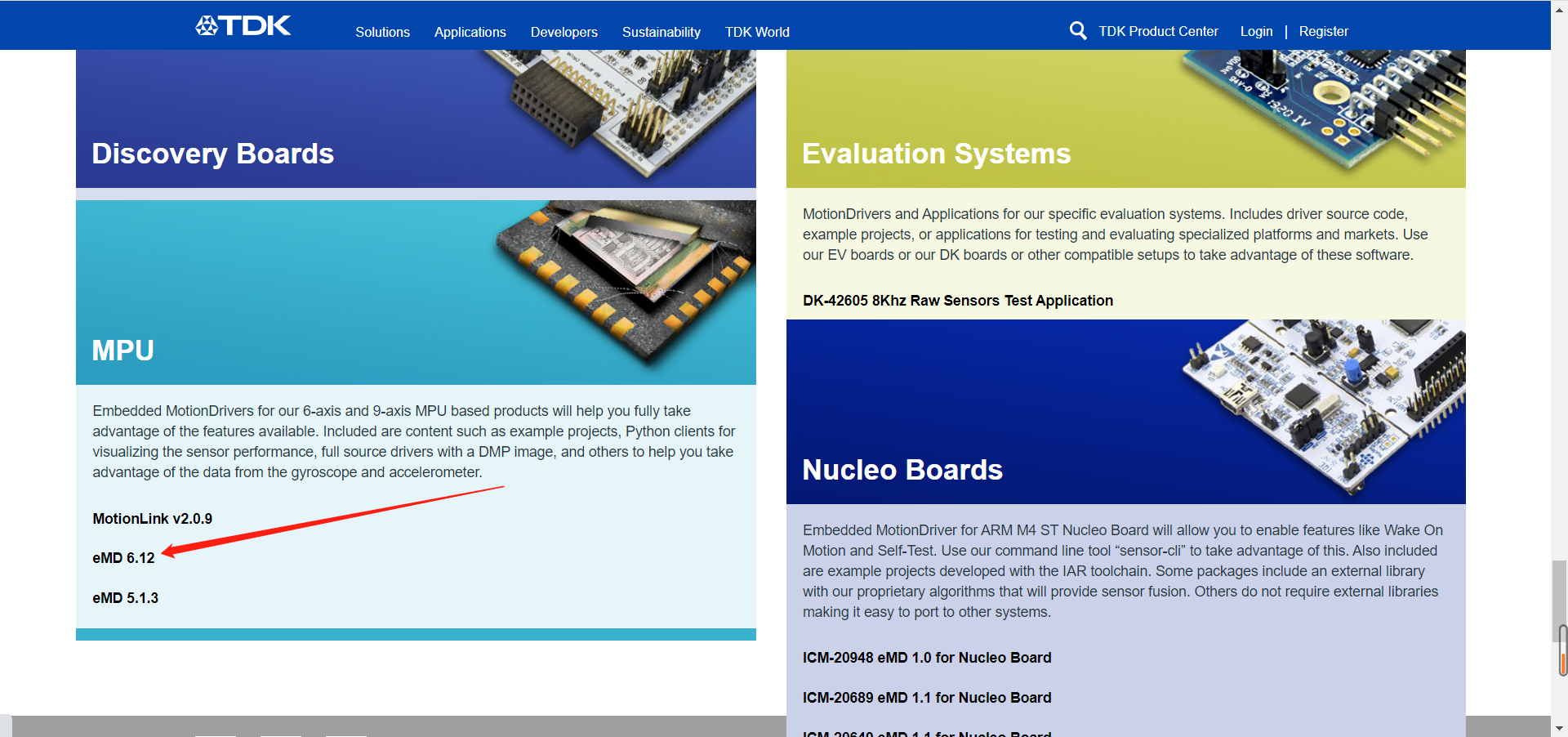
step2: 选择合适的库
下载成功后解压 会看到下边几个文件夹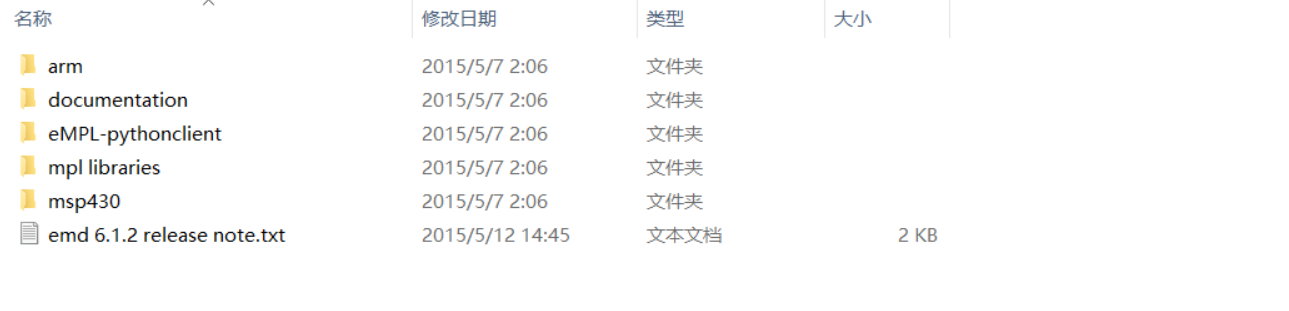
进入arm > STM32F4_MD6 > Projects > eMD6 > core 最核心的就是下边的几个文件夹里的文件
把这四个文件夹复制 粘贴到工程文件夹下
接着返回文件夹主目录 进入mpl libraries > arm > gcc4.9.3 选择合适的lib
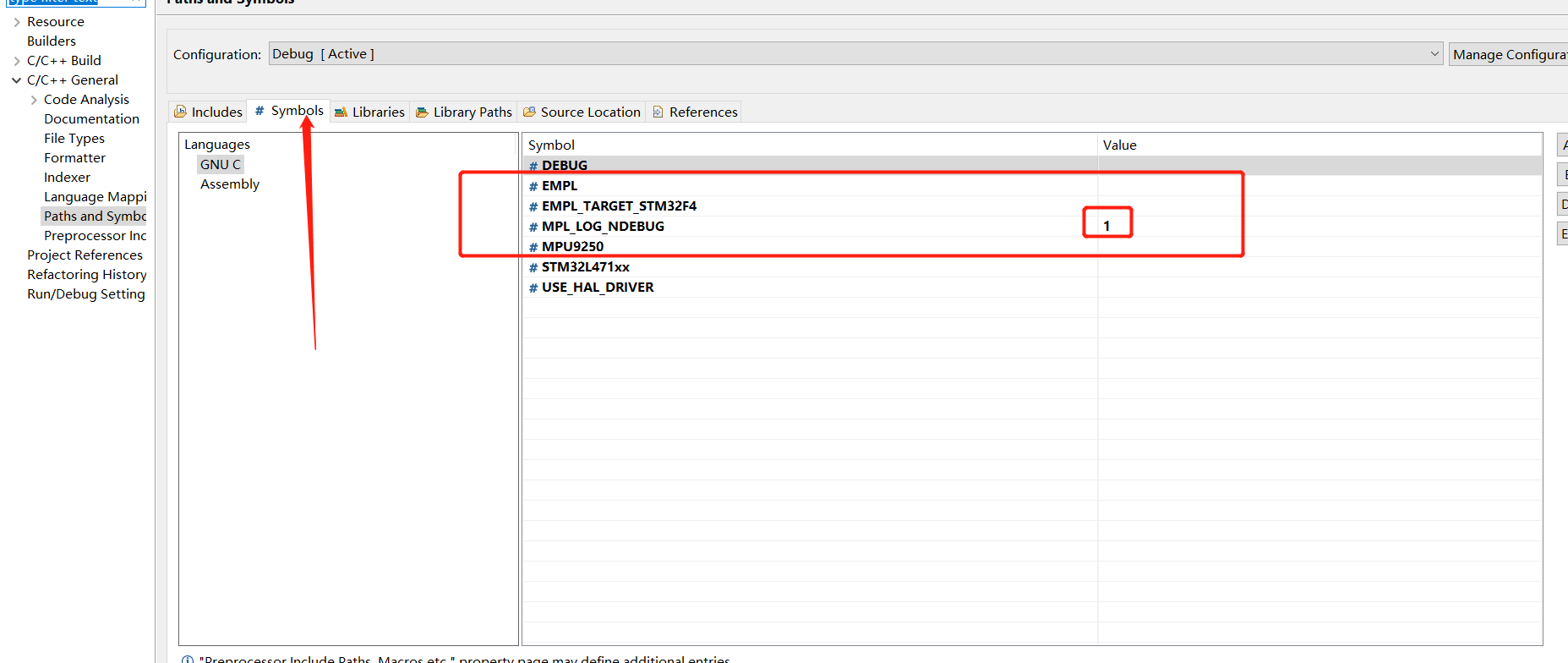
step3: 工程设置
因为我的STM32L4是M4内核的 因此选择下边的具有M4字符的文件 具体选择哪个 需要打开STM32CUBEIDE 选择project > Properties
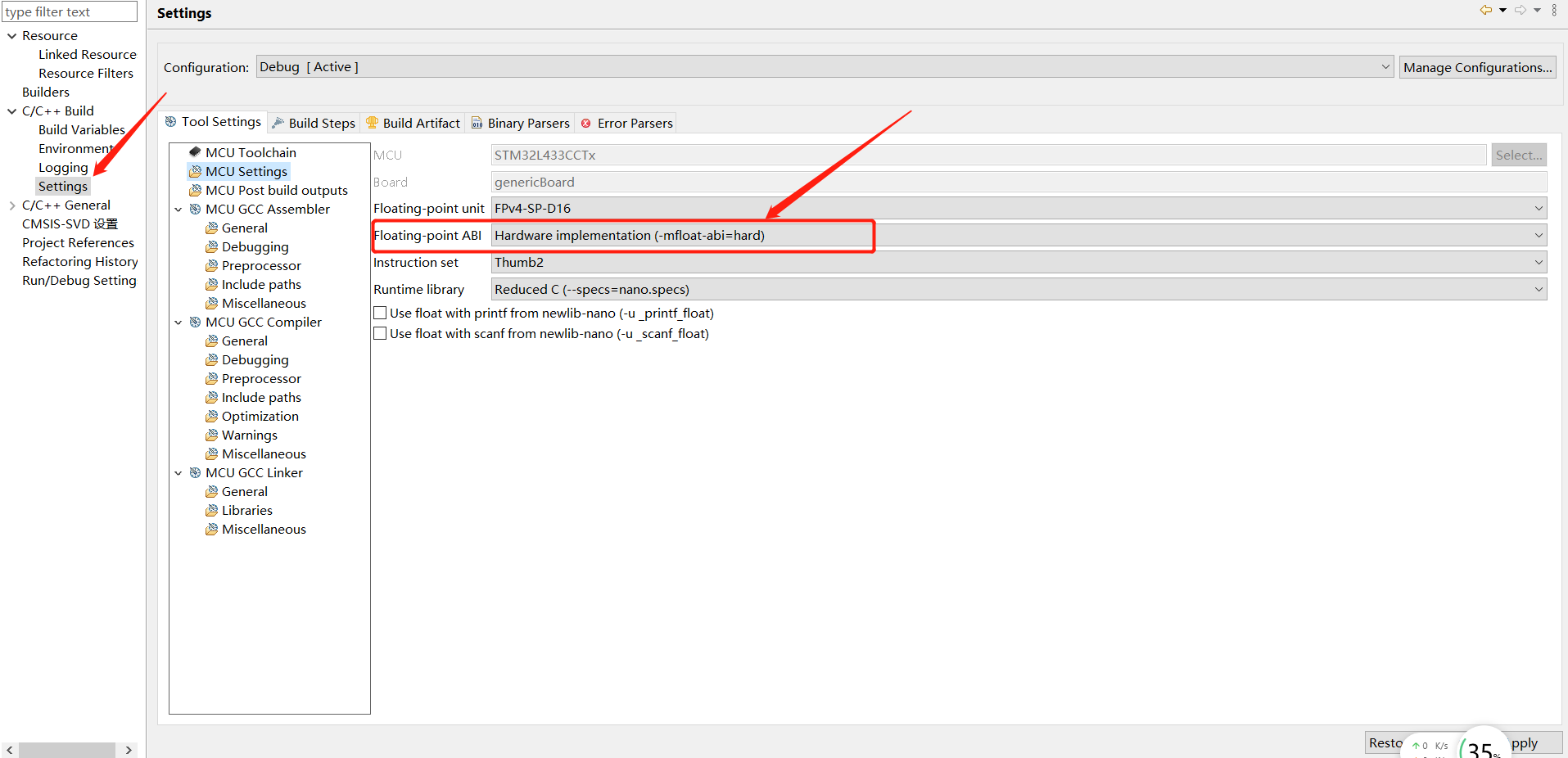
因此选择liblibmplmpu_m4_hardfp.zip 这个压缩文件进行解压 将.a文件放入工程的mpl文件夹中
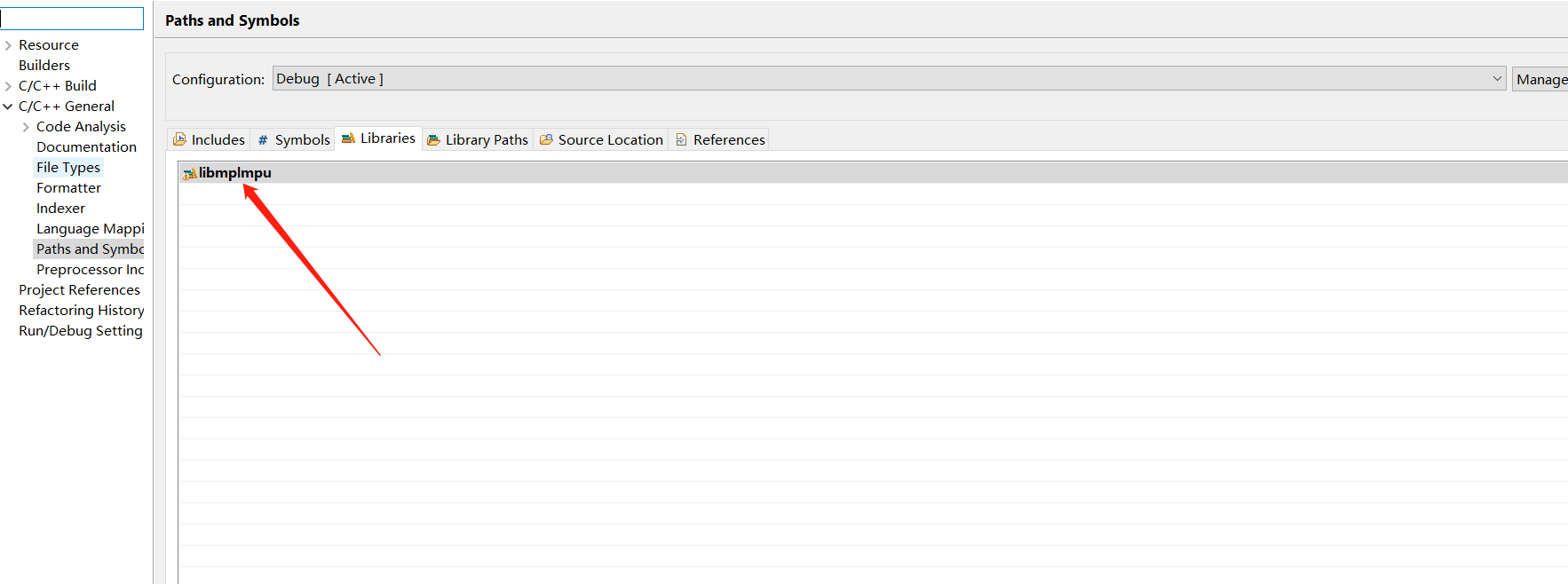
右键工程属性 添加libmplmpu 和路径

接着添加预处理指令
step4: 文件设置
此时编译后会报很多错误 一般都是函数未定义 比如delay_ms iic_write等
比如iic的读写等 可以使用define等效替换
主要修改的几个文件有 inv_mpu.c、inv_mpu_dmp_motion_driver.c等
在inv_mpu.c 的开头需要修改成下边这样
#if defined EMPL_TARGET_STM32F4 unsigned char *mpl_key = (unsigned char*)"eMPL 5.1"; #define i2c_write MPU_Write_Len #define i2c_read MPU_Read_Len //#define delay_ms mdelay #define get_ms mget_ms #define log_i MPL_LOGI #define log_e MPL_LOGE #define min(a,b) ((a<b)?a:b)
在inv_mpu_dmp_motion_driver.c的开头需要修改成下边这样
#if defined EMPL_TARGET_STM32F4 #include <iic.h> #include "main.h" #include "mpu9250.h" #define i2c_write MPU_Write_Len #define i2c_read MPU_Read_Len #define get_ms mget_ms
添加文件mpu9250.c 和 mpu9250.h
mpu9250.c:
/* * mpu9250.c * * Created on: 2022年3月17日 * Author: LK */ #include "mpu9250.h" #include "inv_mpu.h" #include "freertos.h" #include "cmsis_os.h" #include "iic.h" #include "debug.h" //初始化MPU9250 //设置MPU9250陀螺仪传感器满量程范围 //gyro_dps:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps //设置MPU9250加速度传感器满量程范围 //acc_g:0,±2g;1,±4g;2,±8g;3,±16g //设置MPU9250的采样率(假定Fs=1KHz) //sampling_rate:4~1000(Hz) //返回值:0,成功 // 其他,错误代码 u8 MPU9250_Init(u8 gyro_dps, u8 acc_g, u16 sampling_rate) { u8 res=0; IIC_Init(); //初始化IIC总线 MPU_Write_Byte(MPU9250_ADDR,MPU_PWR_MGMT1_REG,0X80);//复位MPU9250 delay_ms(100); //延时100ms MPU_Write_Byte(MPU9250_ADDR,MPU_PWR_MGMT1_REG,0X00);//唤醒MPU9250 MPU_Set_Gyro_Fsr(gyro_dps); //陀螺仪传感器,±2000dps delay_ms(10); res = MPU_Read_Byte(MPU9250_ADDR, MPU_GYRO_CFG_REG); //DEBUG_PRINT("MPU_GYRO_CFG_REG: res = %d\r\n", res); MPU_Set_Accel_Fsr(acc_g); //加速度传感器,±8g delay_ms(10); res = MPU_Read_Byte(MPU9250_ADDR, MPU_ACCEL_CFG_REG); //DEBUG_PRINT("MPU_ACCEL_CFG_REG: res = %d\r\n", res); MPU_Set_Rate(sampling_rate); //设置采样率100Hz res = MPU_Read_Byte(MPU9250_ADDR, MPU_SAMPLE_RATE_REG); //DEBUG_PRINT("MPU_SAMPLE_RATE_REG: res = %d\r\n", res); MPU_Write_Byte(MPU9250_ADDR,MPU_INT_EN_REG,0X00); //关闭所有中断 MPU_Write_Byte(MPU9250_ADDR,MPU_USER_CTRL_REG,0X00);//I2C主模式关闭 MPU_Write_Byte(MPU9250_ADDR,MPU_FIFO_EN_REG,0X00); //关闭FIFO MPU_Write_Byte(MPU9250_ADDR,MPU_INTBP_CFG_REG,0X82);//INT引脚低电平有效,开启bypass模式,可以直接读取磁力计 res=MPU_Read_Byte(MPU9250_ADDR,MPU_DEVICE_ID_REG); //读取MPU6500的ID if(res==MPU6500_ID1 || res==MPU6500_ID2) //器件ID正确 { MPU_Write_Byte(MPU9250_ADDR,MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考 MPU_Write_Byte(MPU9250_ADDR,MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作 MPU_Set_Rate(sampling_rate); //设置采样率为100Hz delay_ms(10); }else return 1; res = MPU_Read_Byte(AK8963_ADDR,MAG_WIA); //读取AK8963 ID if(res==AK8963_ID) { MPU_Write_Byte(AK8963_ADDR,MAG_CNTL1,0X11); //设置AK8963为单次测量模式 }else return 1; return 0; } //设置MPU9250陀螺仪传感器满量程范围 //fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps //返回值:0,设置成功 // 其他,设置失败 u8 MPU_Set_Gyro_Fsr(u8 fsr) { return MPU_Write_Byte(MPU9250_ADDR,MPU_GYRO_CFG_REG,fsr<<3);//设置陀螺仪满量程范围 } //设置MPU9250加速度传感器满量程范围 //fsr:0,±2g;1,±4g;2,±8g;3,±16g //返回值:0,设置成功 // 其他,设置失败 u8 MPU_Set_Accel_Fsr(u8 fsr) { return MPU_Write_Byte(MPU9250_ADDR,MPU_ACCEL_CFG_REG,fsr<<3);//设置加速度传感器满量程范围 } //设置MPU9250的数字低通滤波器 //lpf:数字低通滤波频率(Hz) //返回值:0,设置成功 // 其他,设置失败 u8 MPU_Set_LPF(u16 lpf) { u8 data=0; if(lpf>=188)data=1; else if(lpf>=98)data=2; else if(lpf>=42)data=3; else if(lpf>=20)data=4; else if(lpf>=10)data=5; else data=6; return MPU_Write_Byte(MPU9250_ADDR,MPU_CFG_REG,data);//设置数字低通滤波器 } //设置MPU9250的采样率(假定Fs=1KHz) //rate:4~1000(Hz) //返回值:0,设置成功 // 其他,设置失败 u8 MPU_Set_Rate(u16 rate) { u8 data; if(rate>1000)rate=1000; if(rate<4)rate=4; data=1000/rate-1; data=MPU_Write_Byte(MPU9250_ADDR,MPU_SAMPLE_RATE_REG,data); //设置数字低通滤波器 return MPU_Set_LPF(rate/2); //自动设置LPF为采样率的一半 } //得到温度值 //返回值:温度值(扩大了100倍) short MPU_Get_Temperature(void) { u8 buf[2]; short raw; float temp; MPU_Read_Len(MPU9250_ADDR,MPU_TEMP_OUTH_REG,2,buf); raw=((u16)buf[0]<<8)|buf[1]; temp=21+((double)raw)/333.87; return temp*100;; } //得到陀螺仪值(原始值) //gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号) //返回值:0,成功 // 其他,错误代码 u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz) { u8 buf[6],res; res=MPU_Read_Len(MPU9250_ADDR,MPU_GYRO_XOUTH_REG,6,buf); if(res==0) { *gx=((u16)buf[0]<<8)|buf[1]; *gy=((u16)buf[2]<<8)|buf[3]; *gz=((u16)buf[4]<<8)|buf[5]; } return res;; } //得到加速度值(原始值) //gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号) //返回值:0,成功 // 其他,错误代码 u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az) { u8 buf[6],res; // buf[0] = MPU_Read_Byte(MPU9250_ADDR, MPU_ACCEL_XOUTL_REG); // buf[1] = MPU_Read_Byte(MPU9250_ADDR, MPU_ACCEL_XOUTH_REG); // *ax = (buf[1] << 8) | buf[0]; // buf[2] = MPU_Read_Byte(MPU9250_ADDR, MPU_ACCEL_YOUTL_REG); // buf[3] = MPU_Read_Byte(MPU9250_ADDR, MPU_ACCEL_YOUTH_REG); // *ay = (buf[3] << 8) | buf[2]; // buf[4] = MPU_Read_Byte(MPU9250_ADDR, MPU_ACCEL_ZOUTL_REG); // buf[5] = MPU_Read_Byte(MPU9250_ADDR, MPU_ACCEL_ZOUTH_REG); // *az = (buf[5] << 8) | buf[4]; res=MPU_Read_Len(MPU9250_ADDR,MPU_ACCEL_XOUTH_REG,6,buf); if(res==0) { *ax=((u16)buf[0]<<8)|buf[1]; *ay=((u16)buf[2]<<8)|buf[3]; *az=((u16)buf[4]<<8)|buf[5]; } return res;; } //得到磁力计值(原始值) //mx,my,mz:磁力计x,y,z轴的原始读数(带符号) //返回值:0,成功 // 其他,错误代码 u8 MPU_Get_Magnetometer(short *mx,short *my,short *mz) { u8 buf[6],res; res=MPU_Read_Len(AK8963_ADDR,MAG_XOUT_L,6,buf); if(res==0) { *mx=((u16)buf[1]<<8)|buf[0]; *my=((u16)buf[3]<<8)|buf[2]; *mz=((u16)buf[5]<<8)|buf[4]; } MPU_Write_Byte(AK8963_ADDR,MAG_CNTL1,0X11); //AK8963每次读完以后都需要重新设置为单次测量模式 delay_ms(5); return res;; } //IIC连续写 //addr:器件地址 //reg:寄存器地址 //len:写入长度 //buf:数据区 //返回值:0,正常 // 其他,错误代码 u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf) { u8 i; IIC_Start(); IIC_Send_Byte((addr<<1)|0); //发送器件地址+写命令 if(IIC_Wait_Ack()) //等待应答 { IIC_Stop(); return 1; } IIC_Send_Byte(reg); //写寄存器地址 IIC_Wait_Ack(); //等待应答 for(i=0;i<len;i++) { IIC_Send_Byte(buf[i]); //发送数据 if(IIC_Wait_Ack()) //等待ACK { IIC_Stop(); return 1; } } IIC_Stop(); return 0; } //IIC连续读 //addr:器件地址 //reg:要读取的寄存器地址 //len:要读取的长度 //buf:读取到的数据存储区 //返回值:0,正常 // 其他,错误代码 u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf) { IIC_Start(); IIC_Send_Byte((addr<<1)|0); //发送器件地址+写命令 if(IIC_Wait_Ack()) //等待应答 { IIC_Stop(); return 1; } IIC_Send_Byte(reg); //写寄存器地址 IIC_Wait_Ack(); //等待应答 IIC_Start(); IIC_Send_Byte((addr<<1)|1); //发送器件地址+读命令 IIC_Wait_Ack(); //等待应答 while(len) { if(len==1) *buf=IIC_Read_Byte(0);//读数据,发送nACK else *buf=IIC_Read_Byte(1); //读数据,发送ACK len--; buf++; } IIC_Stop(); //产生一个停止条件 return 0; } //IIC写一个字节 //devaddr:器件IIC地址 //reg:寄存器地址 //data:数据 //返回值:0,正常 // 其他,错误代码 u8 MPU_Write_Byte(u8 addr,u8 reg,u8 data) { IIC_Start(); IIC_Send_Byte((addr<<1)|0); //发送器件地址+写命令 IIC_Wait_Ack(); // if(IIC_Wait_Ack()) //等待应答 // { // IIC_Stop(); // return 1; // } IIC_Send_Byte(reg); //写寄存器地址 IIC_Wait_Ack(); //等待应答 IIC_Send_Byte(data); //发送数据 IIC_Wait_Ack(); // if(IIC_Wait_Ack()) //等待ACK // { // IIC_Stop(); // return 1; // } IIC_Stop(); return 0; } //IIC读一个字节 //reg:寄存器地址 //返回值:读到的数据 u8 MPU_Read_Byte(u8 addr,u8 reg) { u8 res; IIC_Start(); IIC_Send_Byte((addr<<1)|0); //发送器件地址+写命令 IIC_Wait_Ack(); //等待应答 IIC_Send_Byte(reg); //写寄存器地址 IIC_Wait_Ack(); //等待应答 IIC_Start(); IIC_Send_Byte((addr<<1)|1); //发送器件地址+读命令 IIC_Wait_Ack(); //等待应答 res=IIC_Read_Byte(0); //读数据,发送nACK IIC_Stop(); //产生一个停止条件 return res; }
mpu9250.h:
#ifndef _MPU9250_H #define _MPU9250_H //#include "MPU9250_Config.h" //移植所需要配置的文件 #include <iic.h> #include "inv_mpu.h" #include "GlobalVariable.h" //如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位). //如果接V3.3,则IIC地址为0X69(不包含最低位). #define MPU9250_ADDR 0X68 //MPU6500的器件IIC地址 #define MPU6500_ID1 0X71 //MPU6500的器件ID1 #define MPU6500_ID2 0X73 //MPU6500的器件ID2 //MPU9250内部封装了一个AK8963磁力计,地址和ID如下: #define AK8963_ADDR 0X0C //AK8963的I2C地址 #define AK8963_ID 0X48 //AK8963的器件ID //AK8963的内部寄存器 #define MAG_WIA 0x00 //AK8963的器件ID寄存器地址 #define MAG_CNTL1 0X0A #define MAG_CNTL2 0X0B #define MAG_XOUT_L 0X03 #define MAG_XOUT_H 0X04 #define MAG_YOUT_L 0X05 #define MAG_YOUT_H 0X06 #define MAG_ZOUT_L 0X07 #define MAG_ZOUT_H 0X08 //MPU6500的内部寄存器 #define MPU_SELF_TESTX_REG 0X0D //自检寄存器X #define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y #define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z #define MPU_SELF_TESTA_REG 0X10 //自检寄存器A #define MPU_XG_OFFS_USRH 0x13 //偏移寄存器 #define MPU_XG_OFFS_USRL 0x14 #define MPU_YG_OFFS_USRH 0x15 #define MPU_YG_OFFS_USRL 0x16 #define MPU_ZG_OFFS_USRH 0x17 #define MPU_ZG_OFFS_USRL 0x18 #define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器 #define MPU_CFG_REG 0X1A //配置寄存器 #define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器 #define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器 #define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器 #define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器 #define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器 #define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器 #define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器 #define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器 #define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器 #define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器 #define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器 #define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器 #define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器 #define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器 #define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器 #define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器 #define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器 #define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器 #define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器 #define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器 #define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器 #define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器 #define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器 #define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器 #define MPU_INT_EN_REG 0X38 //中断使能寄存器 #define MPU_INT_STA_REG 0X3A //中断状态寄存器 #define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器 #define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器 #define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器 #define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器 #define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器 #define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器 #define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器 #define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器 #define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器 #define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器 #define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器 #define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器 #define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器 #define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器 #define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器 #define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器 #define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器 #define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器 #define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器 #define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器 #define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器 #define MPU_USER_CTRL_REG 0X6A //用户控制寄存器 #define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1 #define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2 #define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位 #define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位 #define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器 #define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器 u8 MPU9250_Init(u8 gyro_dps, u8 acc_g, u16 sampling_rate); u8 MPU_WaitForReady(u8 devaddr); u8 MPU_Write_Byte(u8 devaddr,u8 reg,u8 data); u8 MPU_Read_Byte(u8 devaddr,u8 reg); u8 MPU_Set_Gyro_Fsr(u8 fsr); u8 MPU_Set_Accel_Fsr(u8 fsr); u8 MPU_Set_Rate(u16 rate); u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf); u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf); short MPU_Get_Temperature(void); u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz); u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az); u8 MPU_Get_Magnetometer(short *mx,short *my,short *mz); #endif
上述文件中的u8、u16等类型的变量 需要自己使用define替换成uint8_t、uint16_t等。
IIC的设置参考STM32 CUBEIDE 模拟IIC文件
step5: 函数调用
编译成功后调用
u8 mpu_dmp_init(void);
进行初始化,如果自检通不过可以修改可以搜索sample_wait_ms,将test结构体的sample_wait_ms参数时间修改为5ms
校准的话一般通过8字校准方法,校准过程就更容易完成
调用以下函数
short MPU_Get_Temperature(void); u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz); u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az); u8 MPU_Get_Magnetometer(short *mx,short *my,short *mz);
获取原始温度、角速度、加速度、磁场信息
调用以下函数
u8 mpu_dmp_get_data(float *pitch,float *roll,float *yaw); u8 mpu_mpl_get_data(float *pitch,float *roll,float *yaw);
分别获取dmp处理过的数据和mpl处理过的数据。

