模式识别与机器学习(第一至三章学习记录和心得)
基于距离的分类器源代码
python实现MED分类器
python实现MICD分类器
第一章 模式识别基本概念

1. 定义

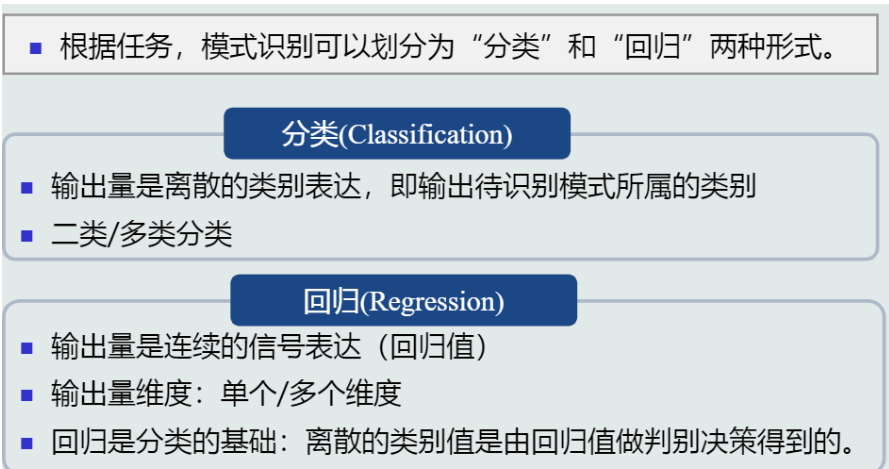
2. 分类
3. 模式识别的数学解释
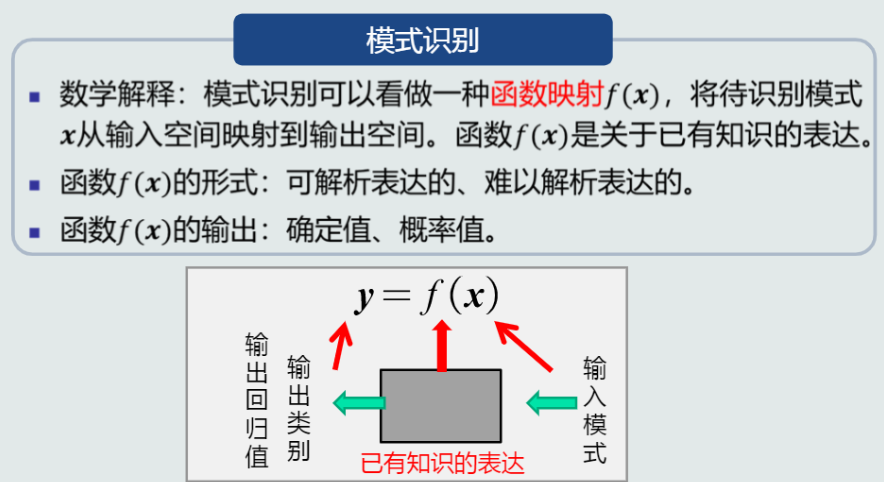
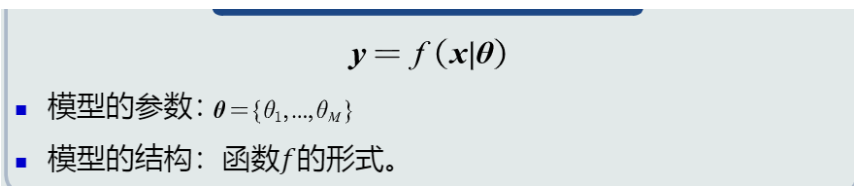
值得一提的是,机器学习的任务是学习上图中的函数f(\boldsymbol{x})
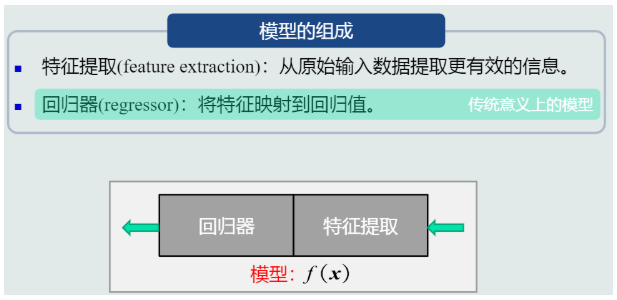
4. 模型
模型(model):关于已有知识的一种表达方式,即函数f(\boldsymbol{x})。
- 用于回归的模型:
-
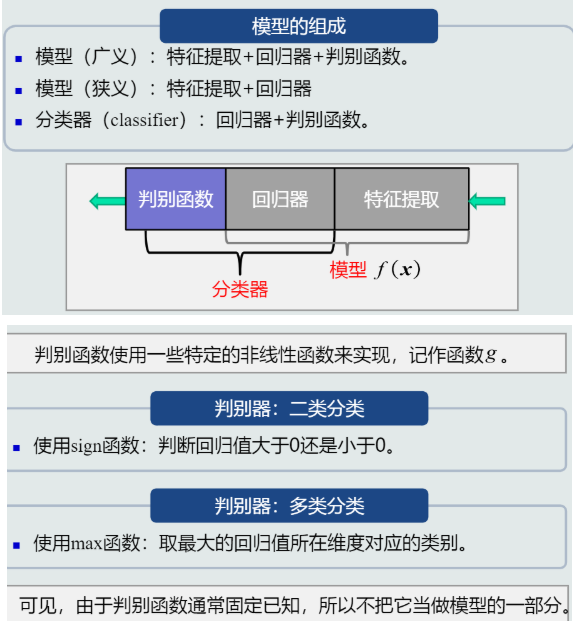
用于分类的模型:
与回归器相比,分类器只是在回归器末端加上了判别函数而已。
5. 特征

-
特征的特性:
(1) 具有辨别能力,提升不同类别之间的识别性能
(2) 鲁棒性,针对不同的观测条件(噪声、尺度变化等),仍能够有效表达类别
6. 特征向量
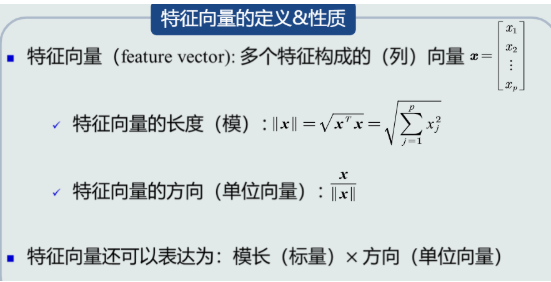
7. 特征向量的相关性度量
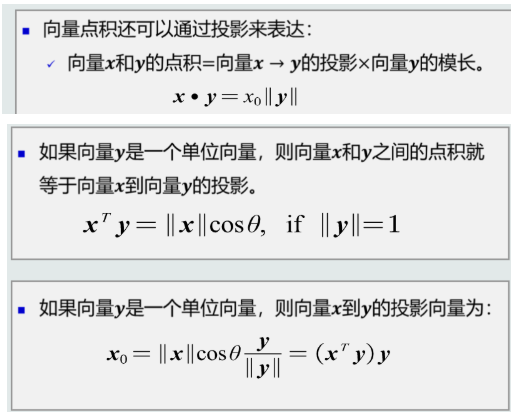
- 点积

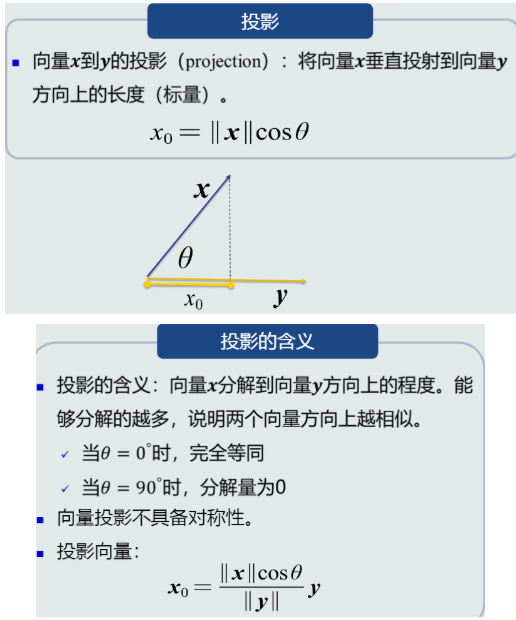
- 投影
- 点积与投影的关系
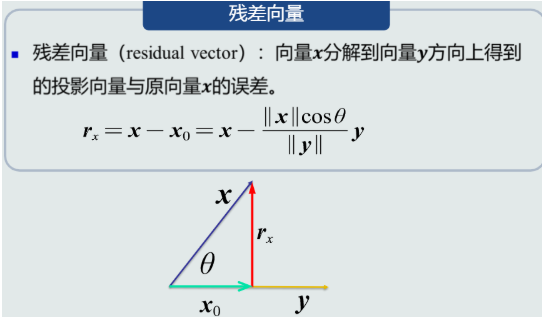
- 残差向量
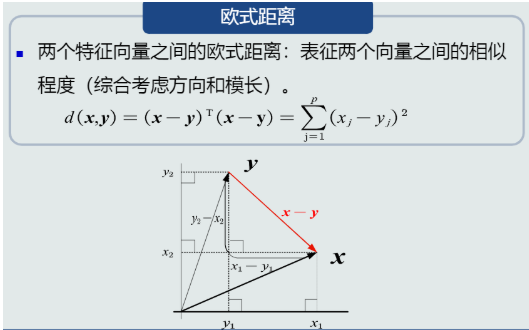
- 欧氏距离
8. 机器学习基本概念
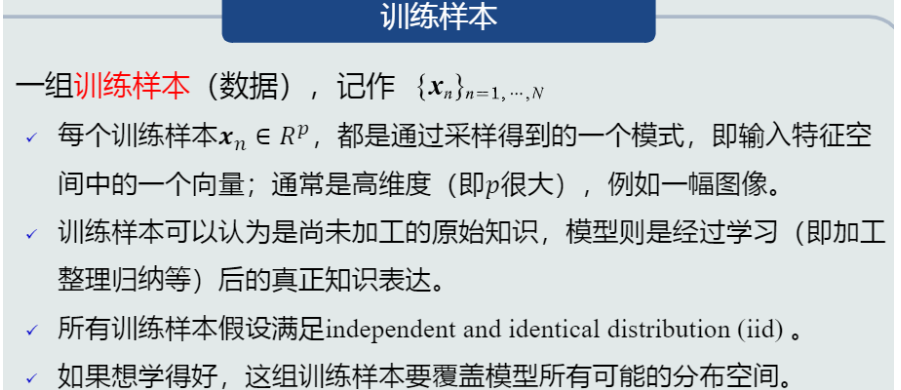
- 训练样本:
-
模型的参数和结构:
-
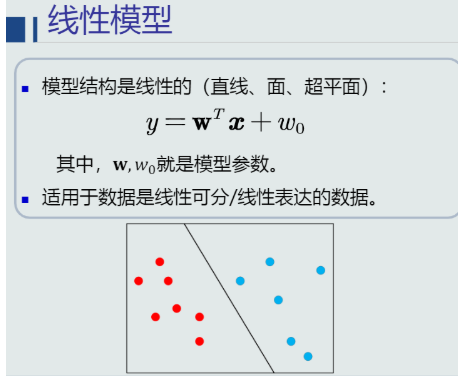
线性模型:
-
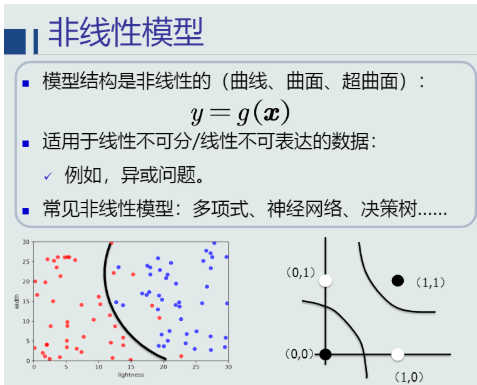
非线性模型:
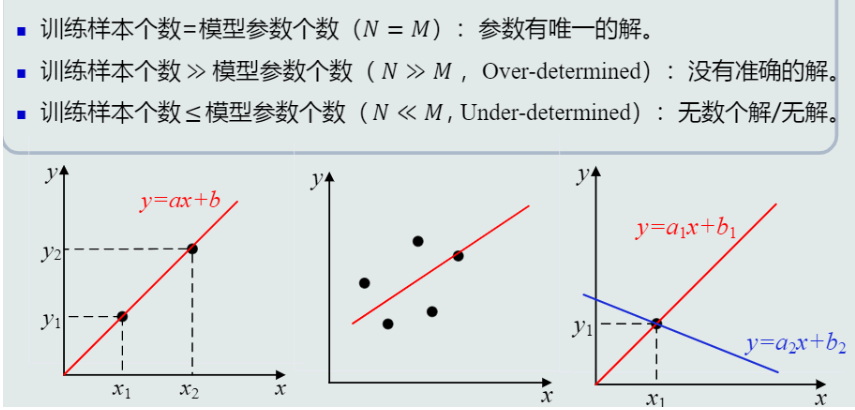
- 样本量与模型参数量的关系:
- 目标函数:
-
优化算法:

-
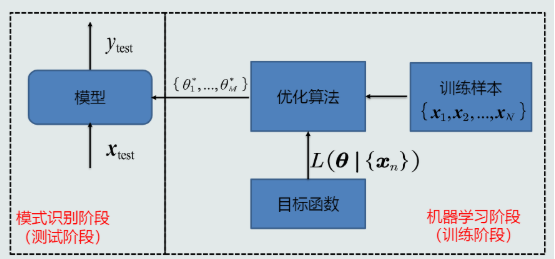
机器学习基本流程:
- 输出真值(标签)&标注:
-
机器学习的方式:
(1) 监督式学习
(2) 无监督式学习

(3) 半监督式学习
(4) 强化学习
-
测试集&训练集:

-
测试误差&训练误差:

-
模型的泛化能力:
(1) 泛化能力:训练得到的模型不仅要对训练样本具有决策能力,也要对新的(训练过程中未看见的)模式具有决策能力。
(2) 过拟合(over-fitting):模型训练阶段表现很好,但是在测试阶段表现很差。模型过于拟合训练数据。

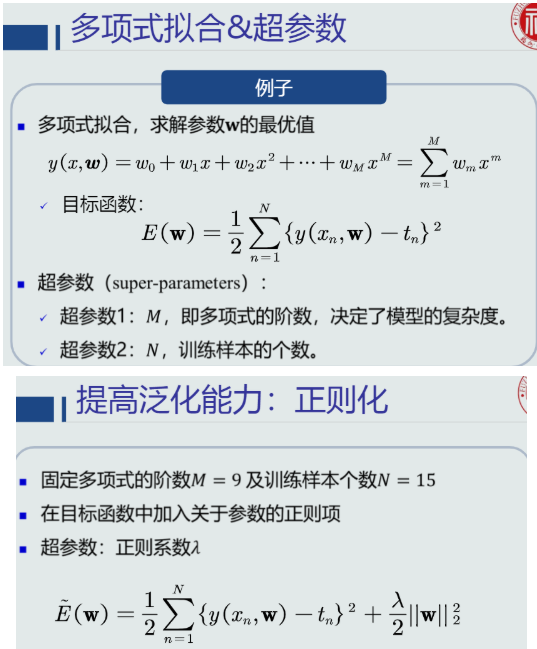
(3) 提高泛化能力(防止过拟合的方法):①选择复杂度适合的模型,②正则化,在目标函数中加入正则项。
-
调参:
调参指的是调整模型中的超参数,模型中的参数(非超参数)是通过机器学习算法得到的,而超参数则需要手动设定。

-
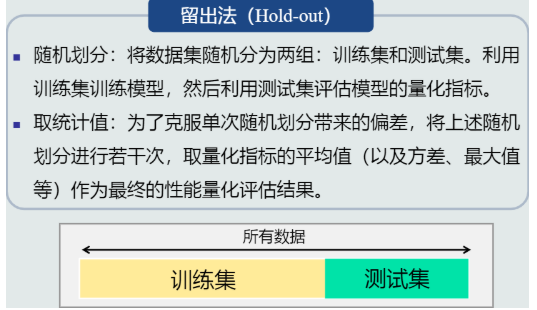
评估方法:
评估方法可以用于选择确定超参数。在训练阶段,从训练集中留出一部分作为验证集,剩下的用于训练,而验证集作为测试集。
(1) 留出法
(2) K交叉验证

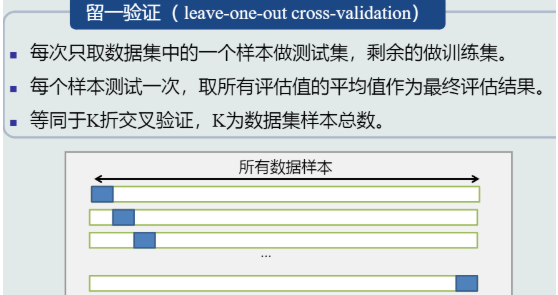
(3) 留一验证(特殊的K折交叉验证)
- 模型的性能度量指标:
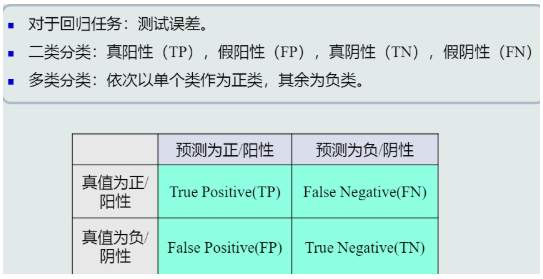
(1) 准确度(Accuracy):将阳性和阴性综合起来度量识别正确的程度。
(2) 精度(Precision):预测为阳性样本的准确程度。也叫作查准率。
(3) 召回率(Recall):全部阳性样本中被预测为阳性的比例。也叫作敏感度。
(4) F-Score:
(5) F1-Score:

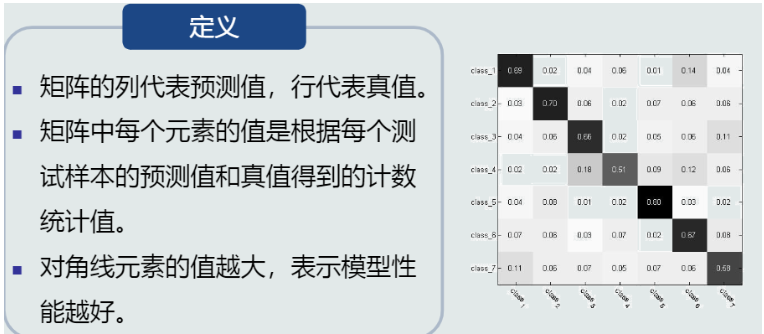
(6) 混淆矩阵(Confusion Matrix):
(7) 曲线度量:
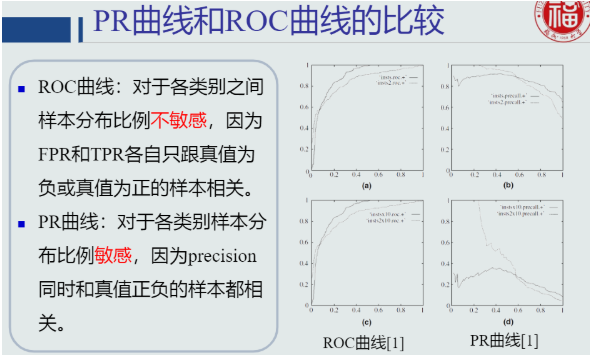
a. PR曲线

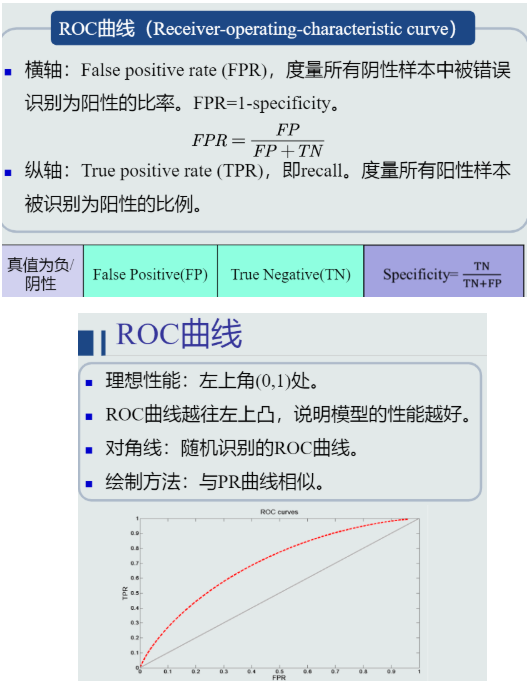
b. ROC曲线
c. PR曲线与ROC曲线的比较
d. AUC曲线
第二章 基于距离的分类器
-
定义
把测试样本到每个类之间的距离作为决策模型,将测试样本判定为与其距离最近的类。
-
判别公式
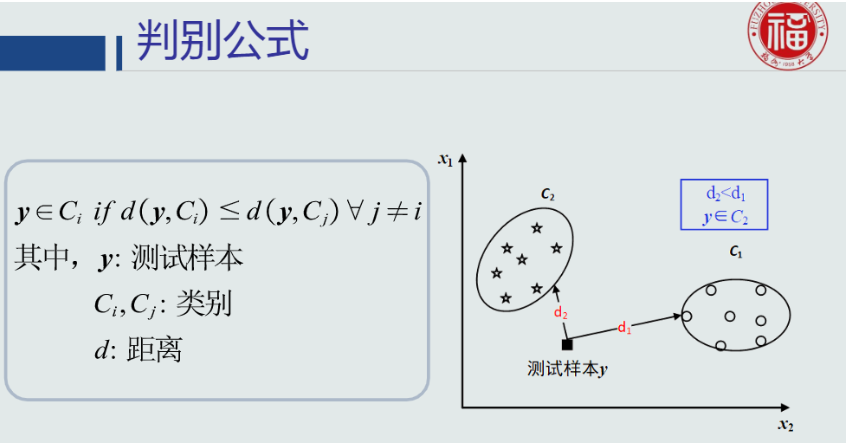
-
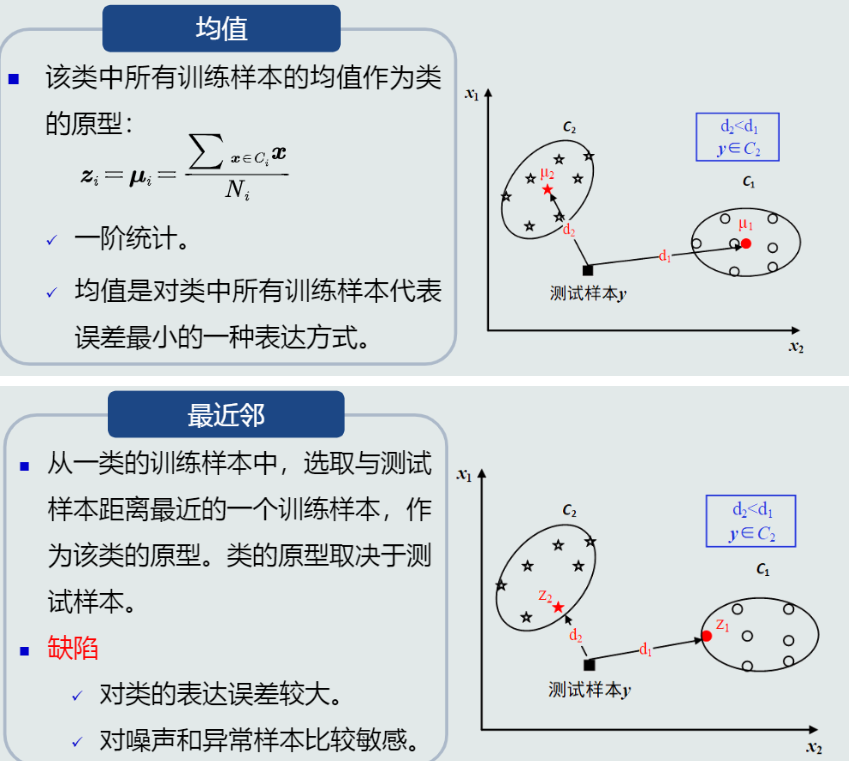
类的原型
(1) 概念:用来代表这个类的一个模式或一组量,便于计算该类和测试样本之间的距离

(2) 种类:均值、最近邻等
-
距离度量
计算测试样本到类的何种距离
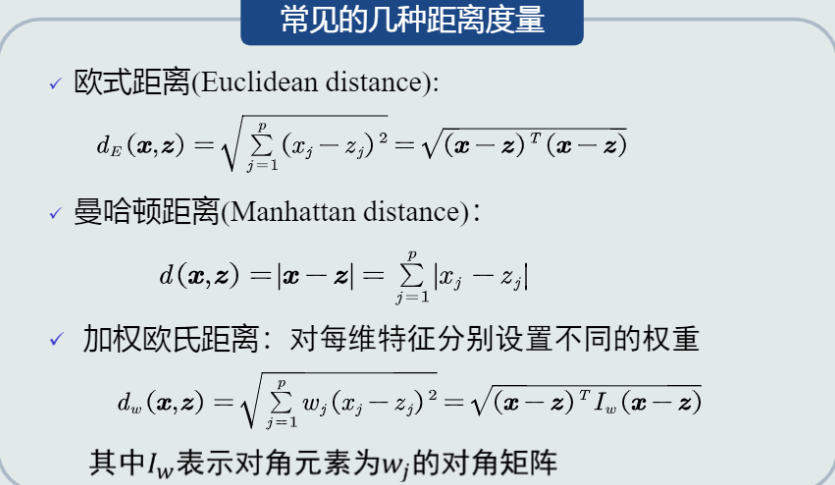
(1) 距离度量标准
(2) 常见的几种距离度量
一、MED分类器
-
最小欧式距离分类器(Minimum Euclidean Distance Classifier)
-
距离度量:欧氏距离
-
类的原型:均值
-
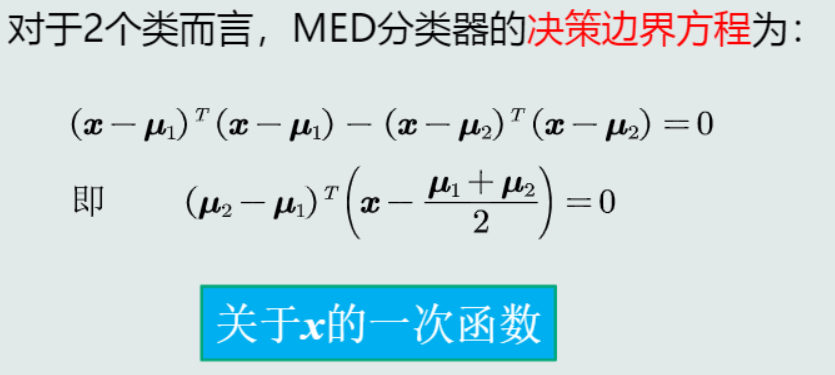
目标(对于二分类问题):给定两个类C1和C2,计算两个类各自的中心点\boldsymbol {\mu_1}、\boldsymbol {\mu_2},计算测试样本与两个中心点的距离,从而做出相应的决策

-
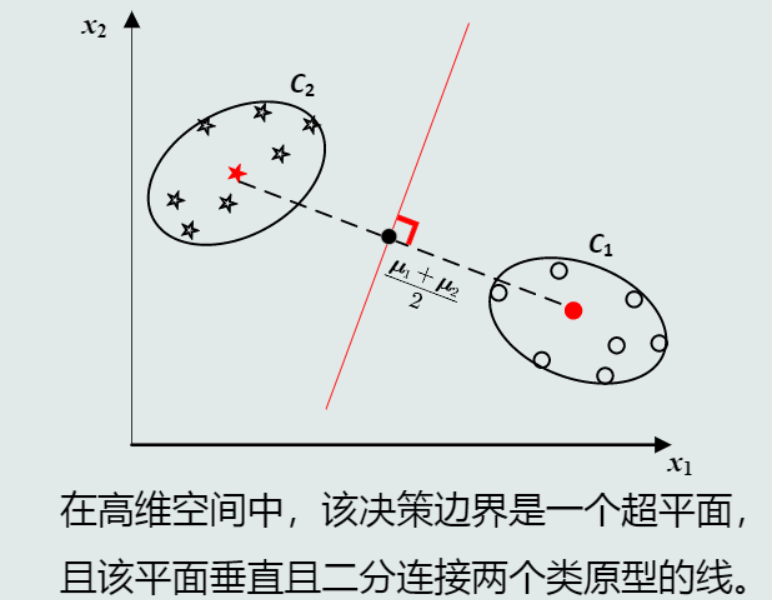
决策边界:
-
特点:
(1) 平移不变性
(2) 旋转不变性
-
MED分类器(欧氏距离)存在的问题:
(1) 特征的量纲会影响分类结果(样本的协方差矩阵中,对角线元素不相等)
(2) 没有考虑特征之间的相关性(样本的协方差矩阵中,非对角元素不为0)
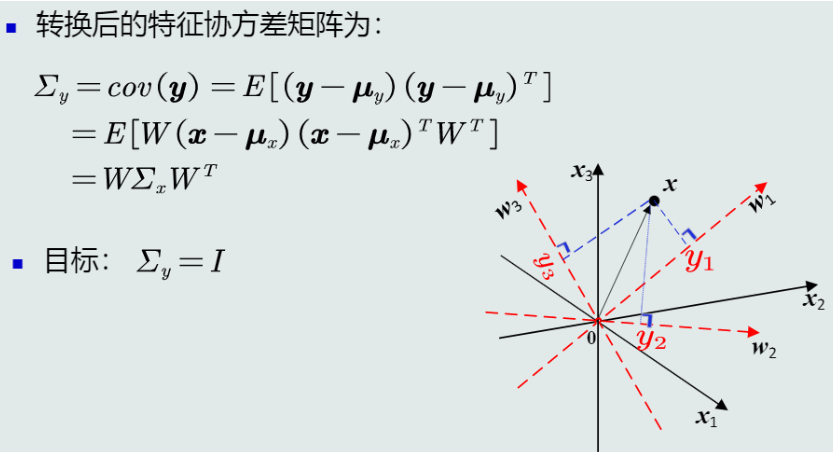
二、特征白化
-
目的:将原始特征映射到一个新的特征空间,使得在新空间中特征的协方差矩阵为单位矩阵,从而去除特征变化的不同及特征之间的相关性。(消除量纲的影响,去除特征之间的相关性)
-
方法:特征解耦+白化
(1) 解耦:将协方差矩阵对角化,去除特征之间的相关性
(2) 白化:在对角化的协方差矩阵上进行尺度变换,实现所有特征具有相同方差(单位化)
-
公式:
\boldsymbol{y} = W\boldsymbol{x}其中,\boldsymbol{x}为原始特征,\boldsymbol{y}为新特征,W是映射矩阵。W = W_2W_1,W_1用于解耦,W_2用于白化。
解耦:W_1 = \Phi^T (\Sigma_x的特征向量矩阵的转置,\Sigma_x是\boldsymbol{x}的协方差矩阵)

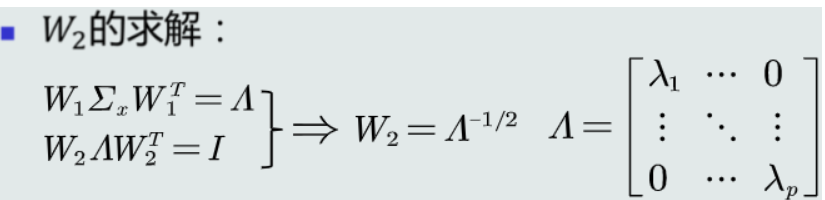
白化:W_2 = \Lambda^{-\frac{1}{2}} (\Lambda是以\Sigma_x的特征值作为对角线元素的对角阵,对应于\Phi)
-
目标结果:
-
几点说明
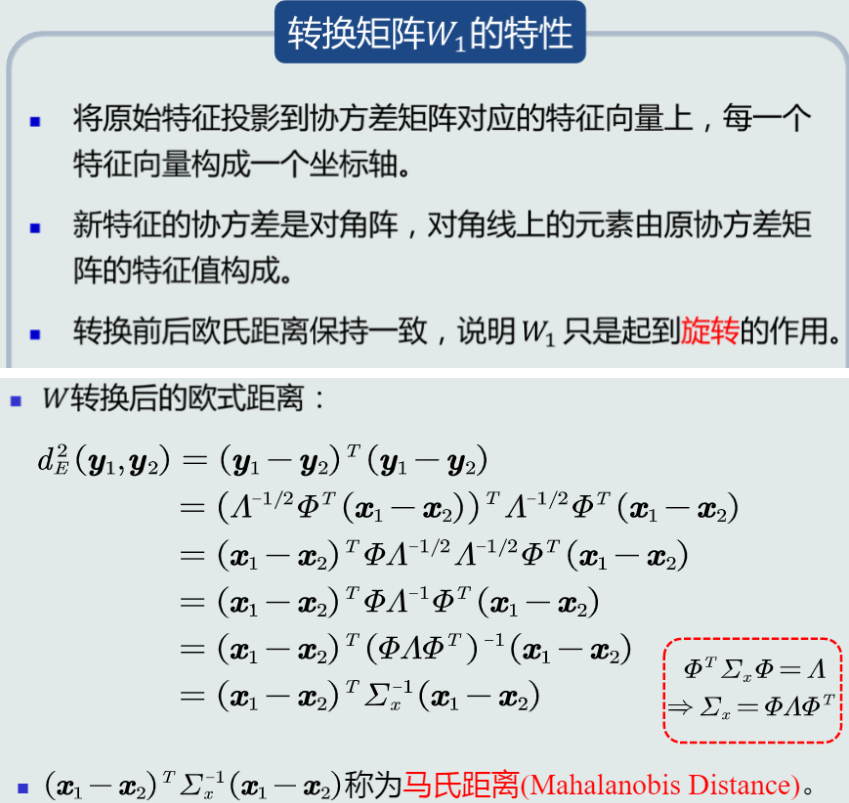
三、MICD分类器
-
最小类内距离分类器(Minimum Intra-class Distance Classifier), 基于马氏距离的分类器
-
距离度量:马氏距离
-
类的原型:均值
-
判别公式:

-
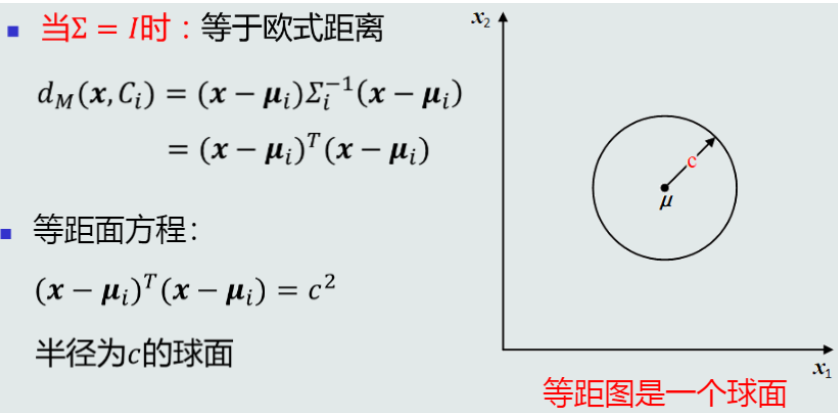
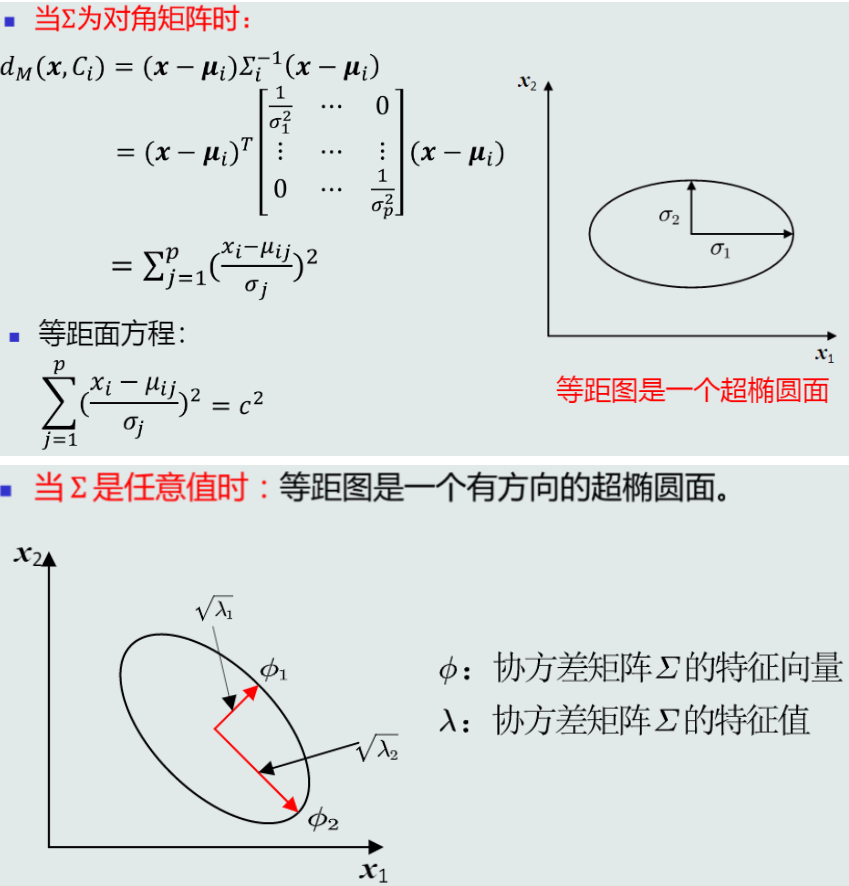
性质:
-
决策边界:
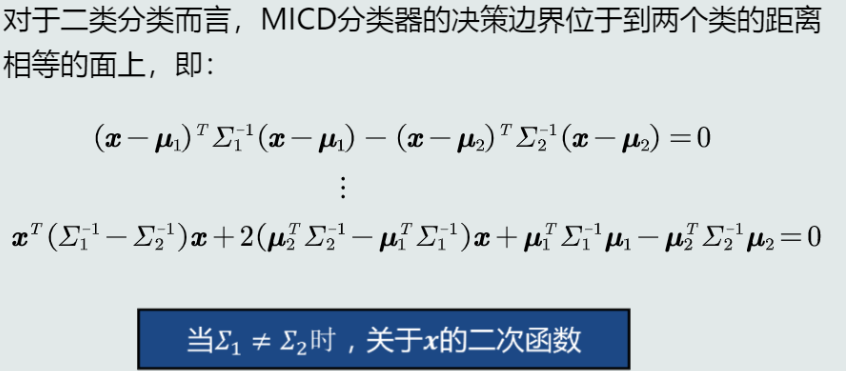
由上述公式可知,决策边界可能是超平面、超球面、超椭球面、超抛物面、超双曲面(取决于\Sigma_1和\Sigma_2之间的关系)
-
特点:
具有非奇异线性变换不变性
(1) 平移不变性
(2) 旋转不变性
(3) 尺度缩放不变性
(4) 不受量纲影响
-
MICD分类器的问题:

MICD分类器的错误概率可能大于MED分类器!
第三章 贝叶斯决策与学习
引入概率的观点,考虑类的分布等先验知识,例如,类别之间样本数量的比例,类别之间的相互关系等。经由观测似然修正先验概率,得到后验概率,并用后验概率进行分类决策。有时,还要考虑对不同类别的样本误判造成的后果。



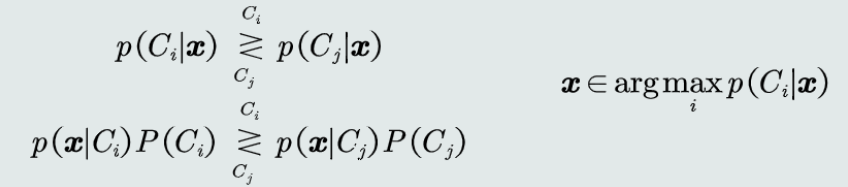
一、MAP分类器
-
最大后验概率(Maximum posterior probability, MAP)分类器
-
目标:将测试样本决策分类给后验概率最大的那个类
-
判别公式:
-
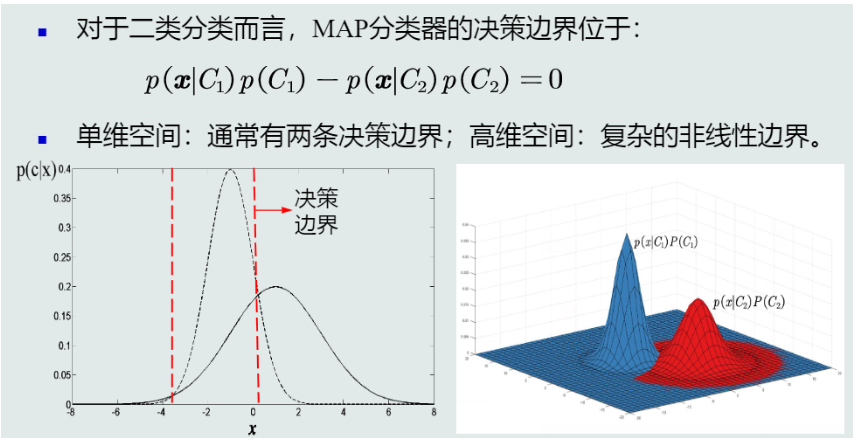
决策边界:
-
决策误差:
(1) 决策误差的定义:
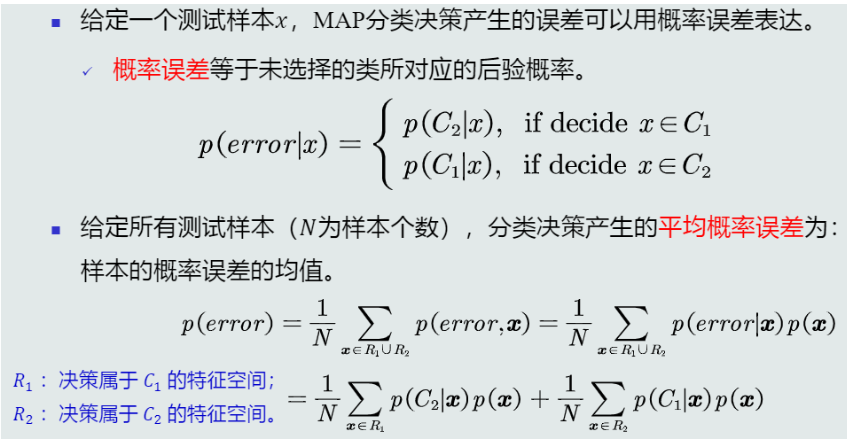
其中,R1与R2交集为空。
(2) MAP分类器的决策误差:
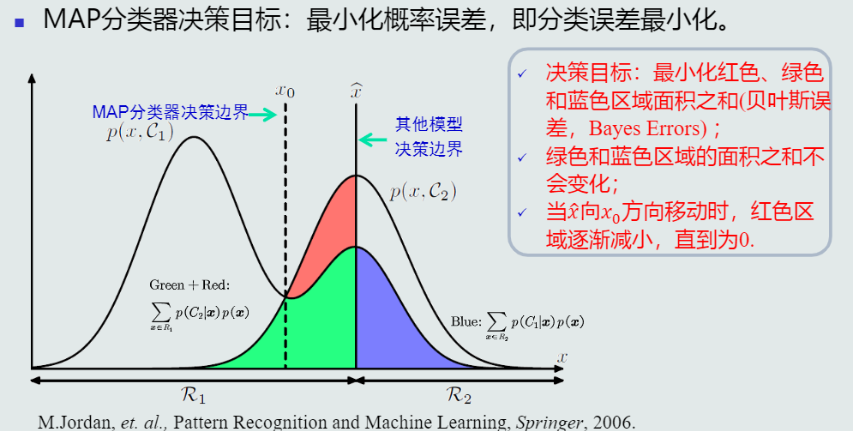
无论如何,两个类别的概率密度分布中重叠的部分一定会出现误判,所以最好的情况就是,在不重叠的部分没有误判,即上图的x = x_0位置。给定所有测试样本,MAP分类器选择后验概率最大的类,等于最小化平均概率误差,即最小化决策误差。
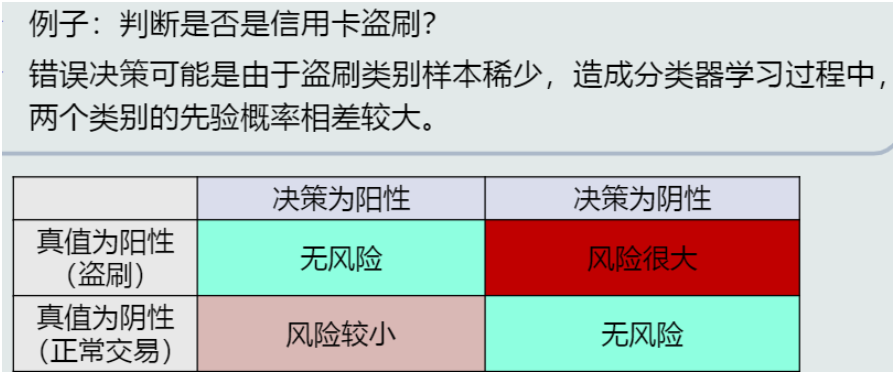
二、 决策风险
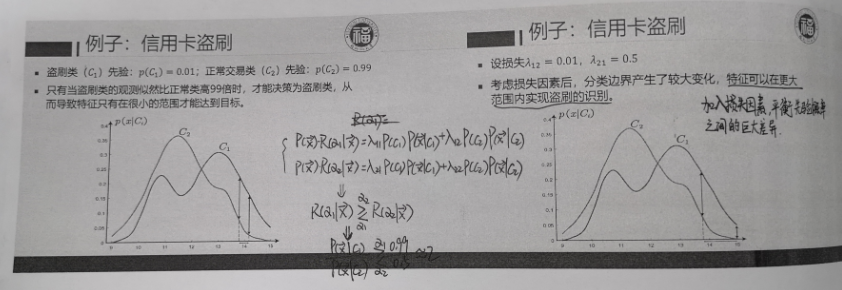
贝叶斯决策不能排除出现误判的情况,由此会带来决策风险。更重要的是,不同的错误决策会产生程度完全不一样的风险。
经典案例:
-
损失的概念:
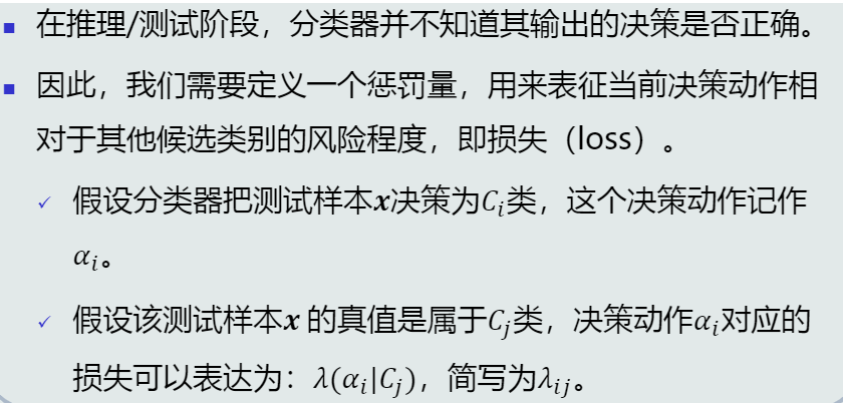
-
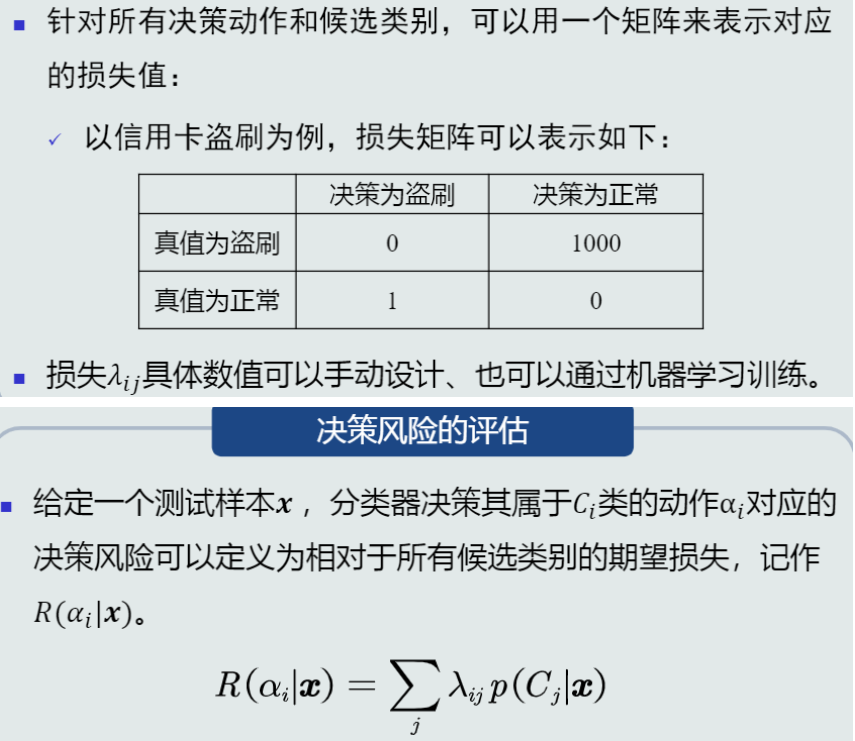
损失/决策风险的评估:
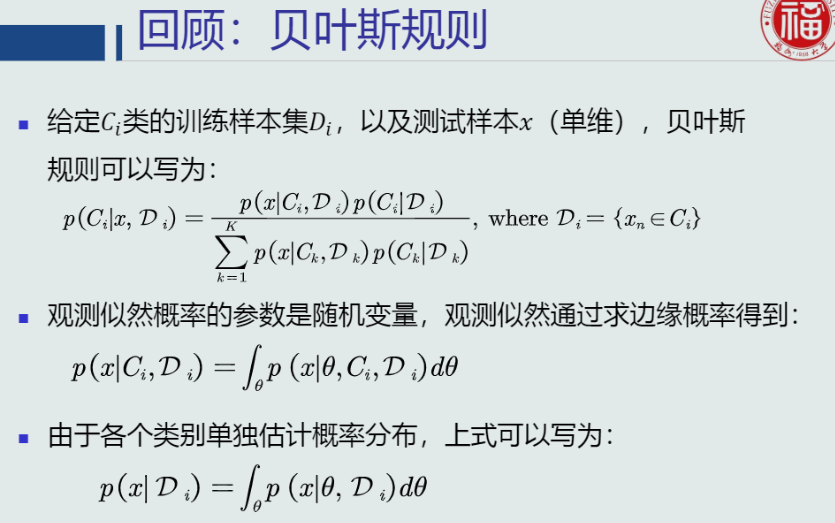
三、贝叶斯分类器(Bayes classifier)
在MAP分类器的基础上,加入决策风险因素,得到贝叶斯分类器。给定一个测试样本\boldsymbol {x},贝叶斯分类器选择决策风险最小的类。
-
判别公式:
(1) 二分类:
(2) 多分类:

(3) 信用卡盗刷的栗子:
-
贝叶斯分类器的决策损失:
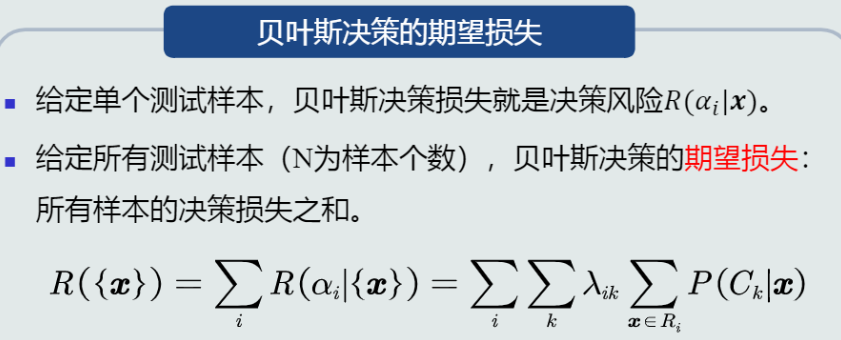
-
决策目标:
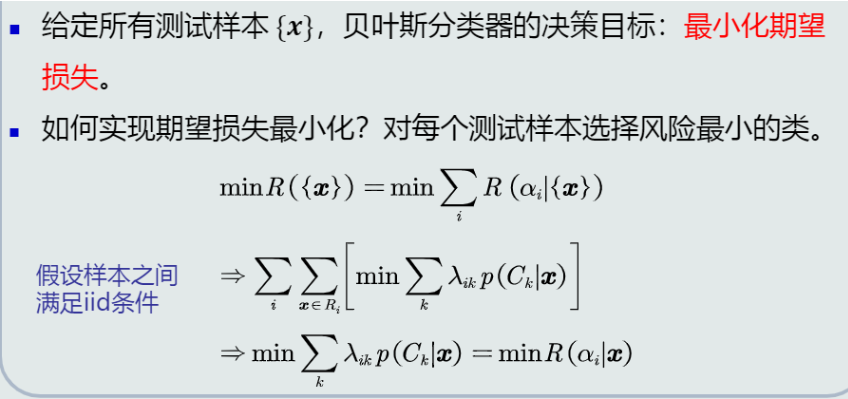
-
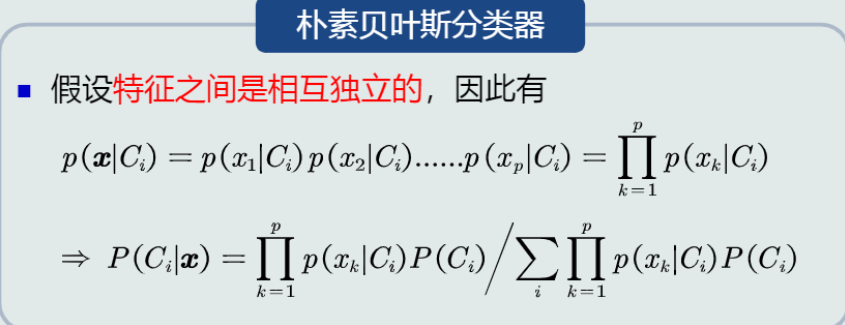
朴素贝叶斯分类器(Naive Bayes):
若特征是多维的,则学习特征之间的相关性会很困难。简化问题,假设特征之间是相互独立的,则得到朴素贝叶斯分类器。
-
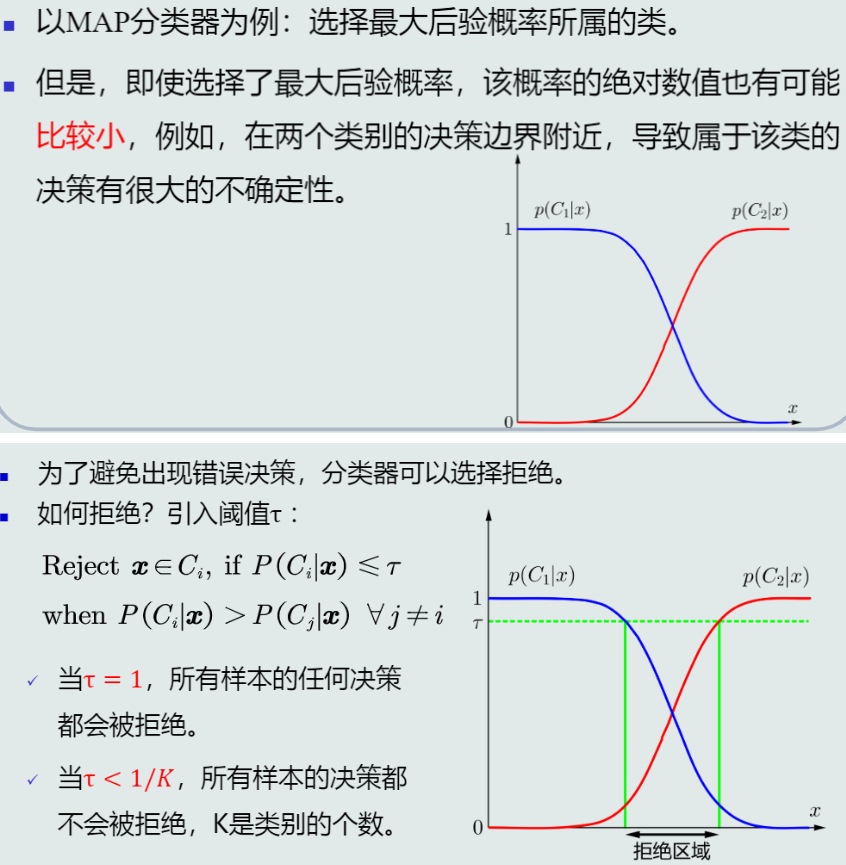
拒绝选项:
当样本落在决策边界时的处理方法
四、先验概率与观测概率的表达
先验概率和观测概率的表达方式:
(1) 常数表达
(2) 参数化解析表达:高斯分布(正态分布)等……
(3) 非参数化表达:直方图、核密度、蒙特卡洛等……
1. 高斯分布(正态分布)
(1) 单维:

(2) 多维:

上式中的|\Sigma|表示协方差矩阵的行列式,\Sigma是非奇异的,k表示特征维度。
2. 观测概率的确定
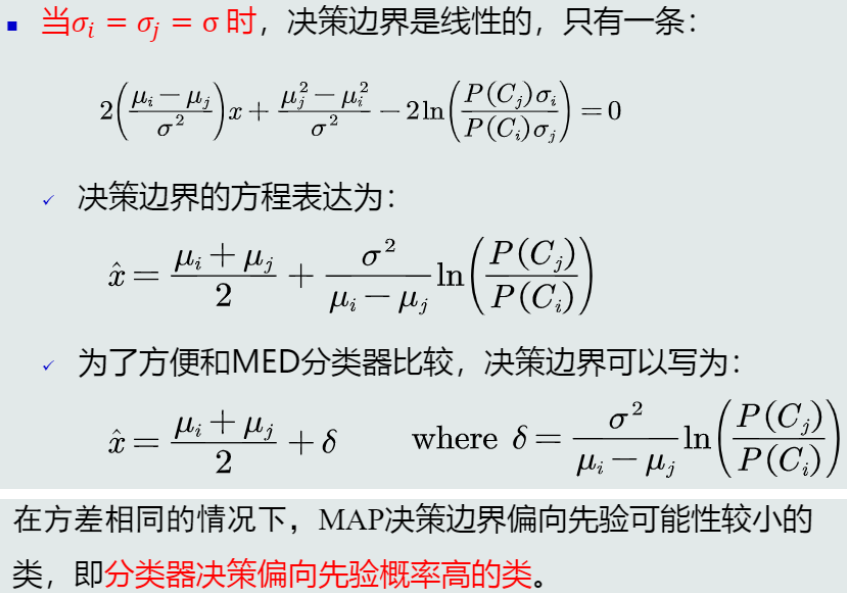
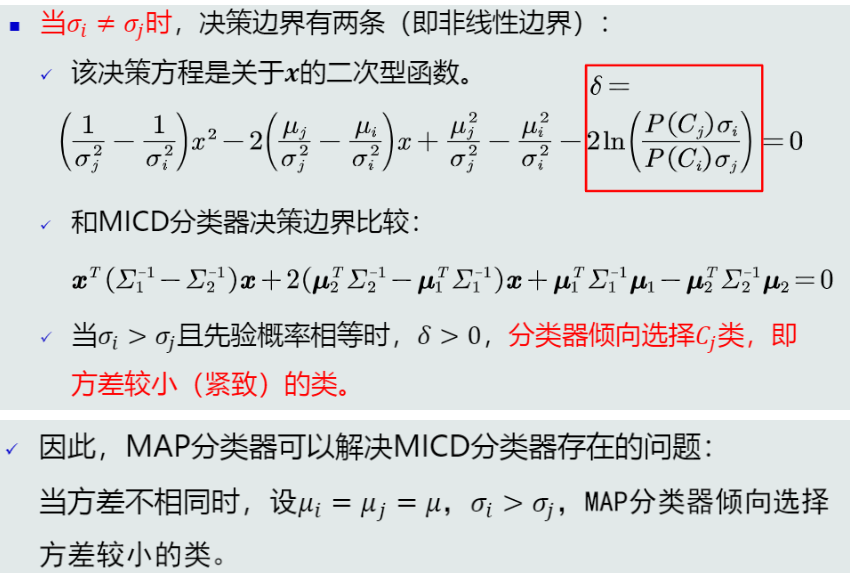
(1) 假设观测概率服从单维高斯分布
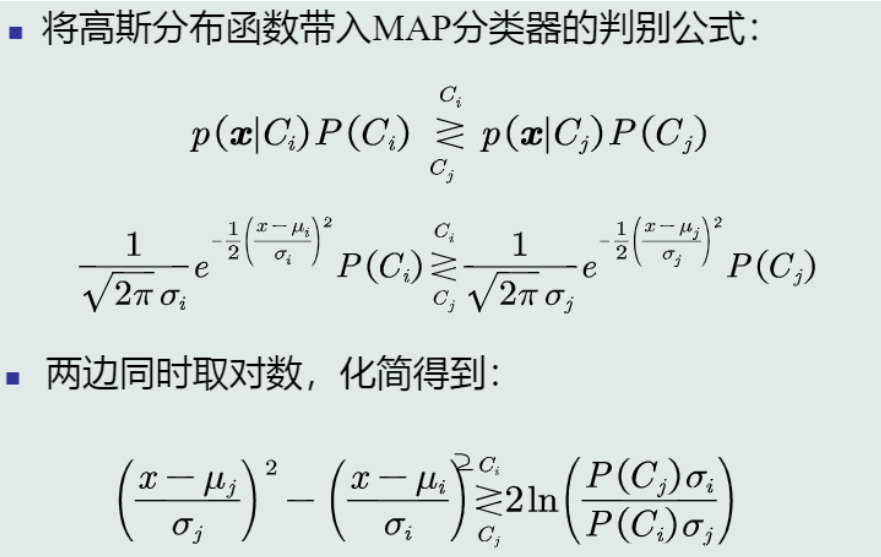
-
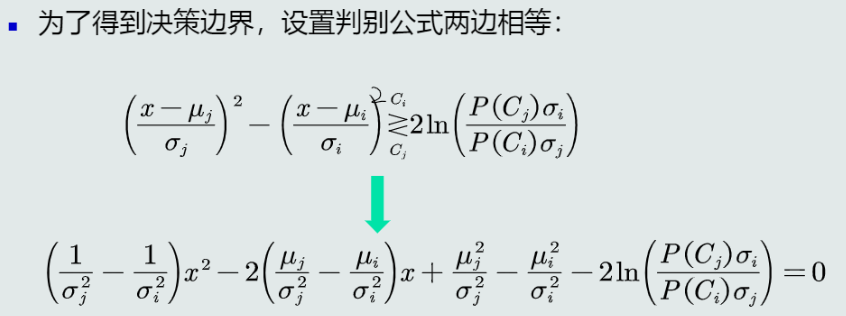
决策边界:
(2) 假设观测概率服从多维高斯分布
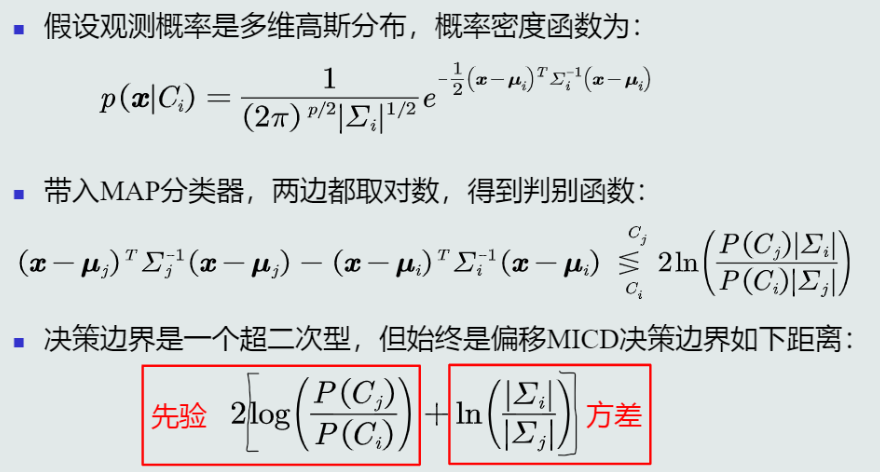
- 决策边界:

3. 各分类器判别函数的比较
MAP分类器偏向于先验概率较大、分布较为紧致的类!能够解决MICD分类器的问题(MICD倾向于选择方差较大的类)。

五、先验和观测似然概率的学习
贝叶斯决策中,求取后验概率需要事先知道每个类的先验概率和观测似然概率,这两类概率分布可以通过机器学习算法得到。根据概率分布的表达形式,监督式学习(训练样本的标签是给定的)方法可以通过以下两种方法学习先验和观测似然概率。

-
常用的参数化方法(概率分布形式已知):
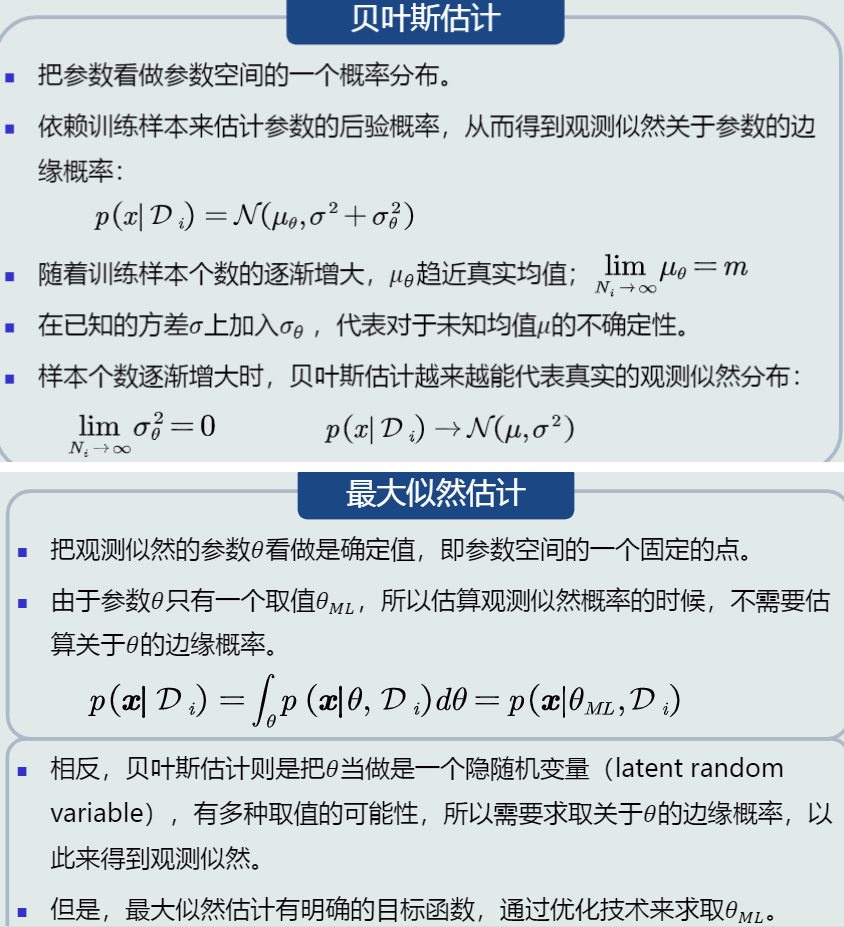
(1) 最大似然估计(Maximum Likelihood Estimation, MLE):将参数视为确定值
(2) 贝叶斯估计(Bayesian Estimation):将参数视为随机变量
-
常用的非参数化方法(概率分布形式未知):
(1) K近邻法(K-nearest neighbors, KNN)
(2) 直方图技术(Histogram technique)
(3) 核密度估计(Kernel density estimation)
1. 最大似然估计
-
定义:

-
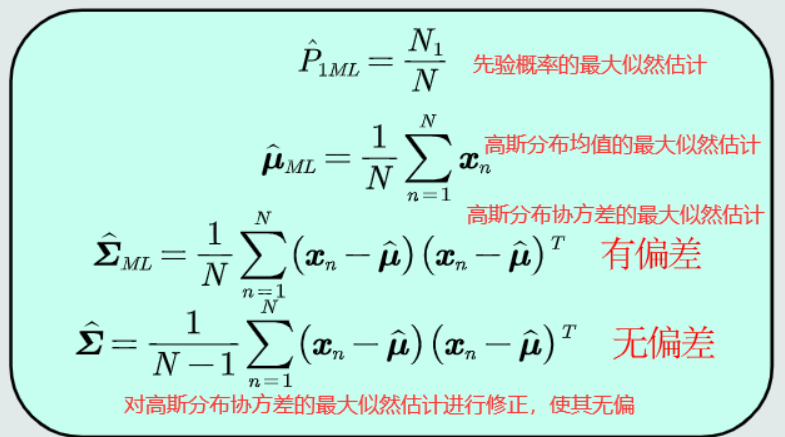
估计先验概率:
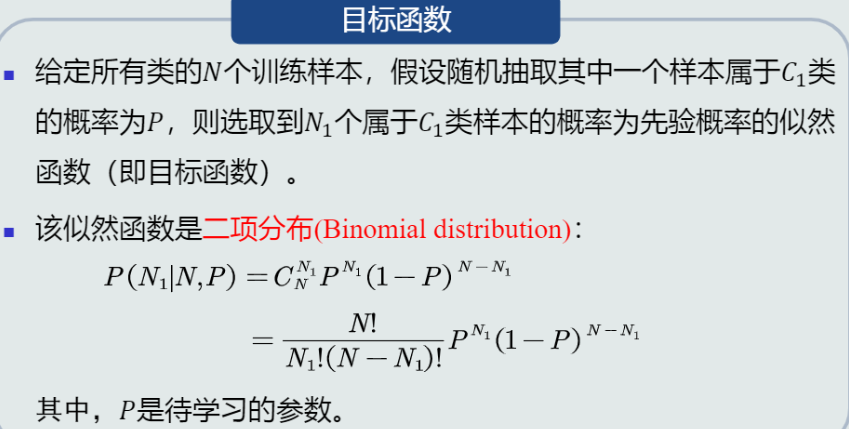

先验概率的最大似然估计就是该类训练样本出现的频率
-
估计观测概率:
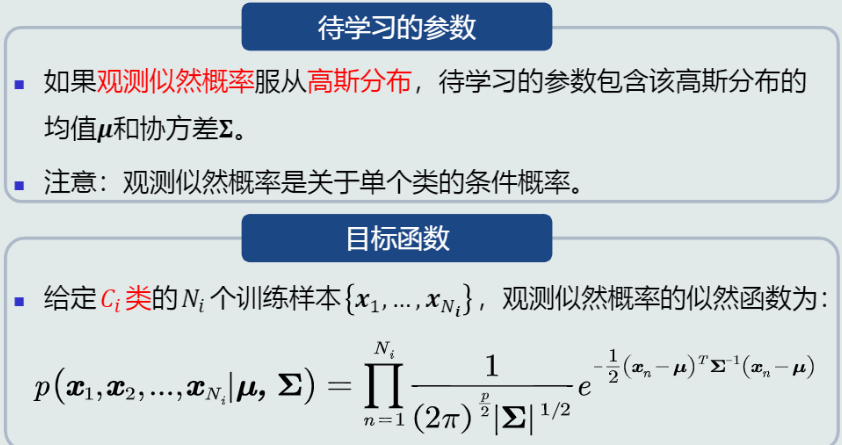
利用最大似然估计方法,计算得到高斯分布均值和高斯分布协方差的估计量如下:

高斯分布均值的最大似然估计等于样本均值,高斯分布协方差的最大似然估计等于所有样本的协方差!
2. 最大似然的估计偏差
-
无偏估计的概念:

-
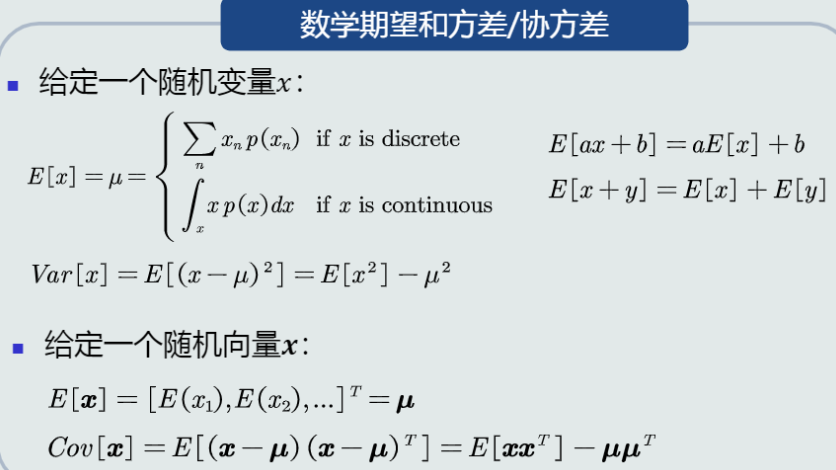
数学期望和协方差的计算:
-
高斯分布均值和协方差的最大似然估计的无偏性:
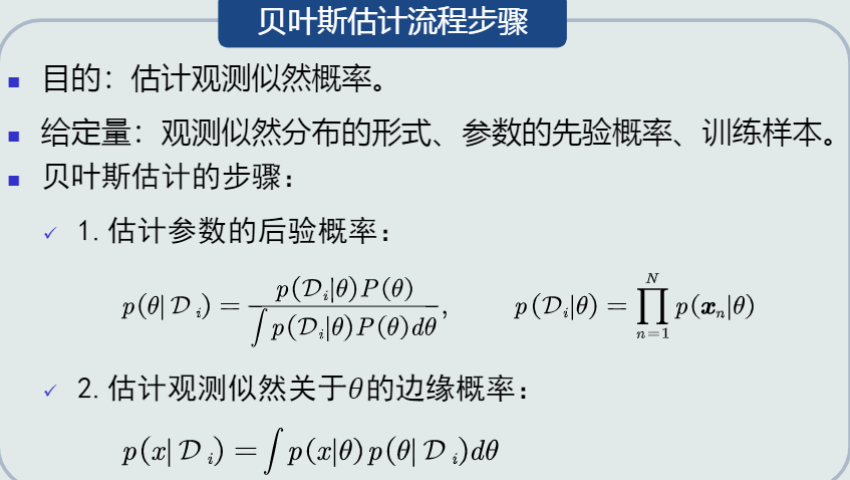
3. 贝叶斯估计
-
定义:
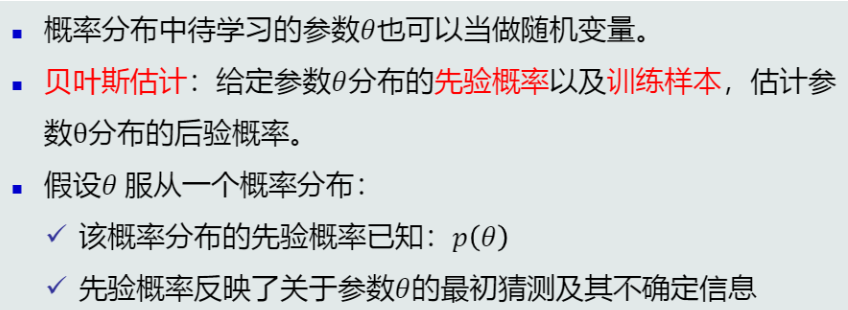
这里的参数\theta表示参数空间的所有参数。
-
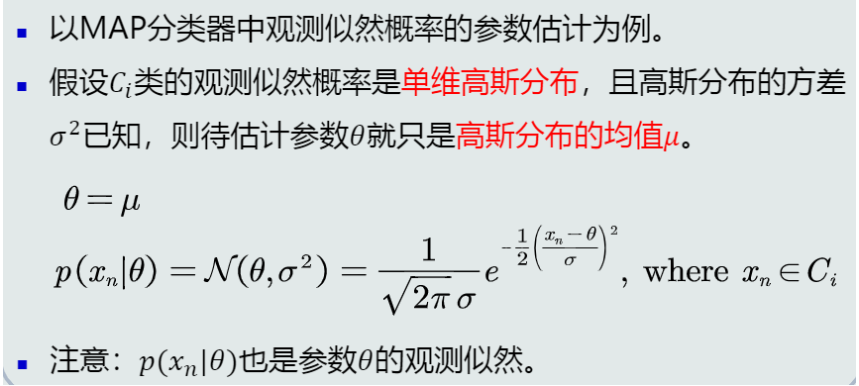
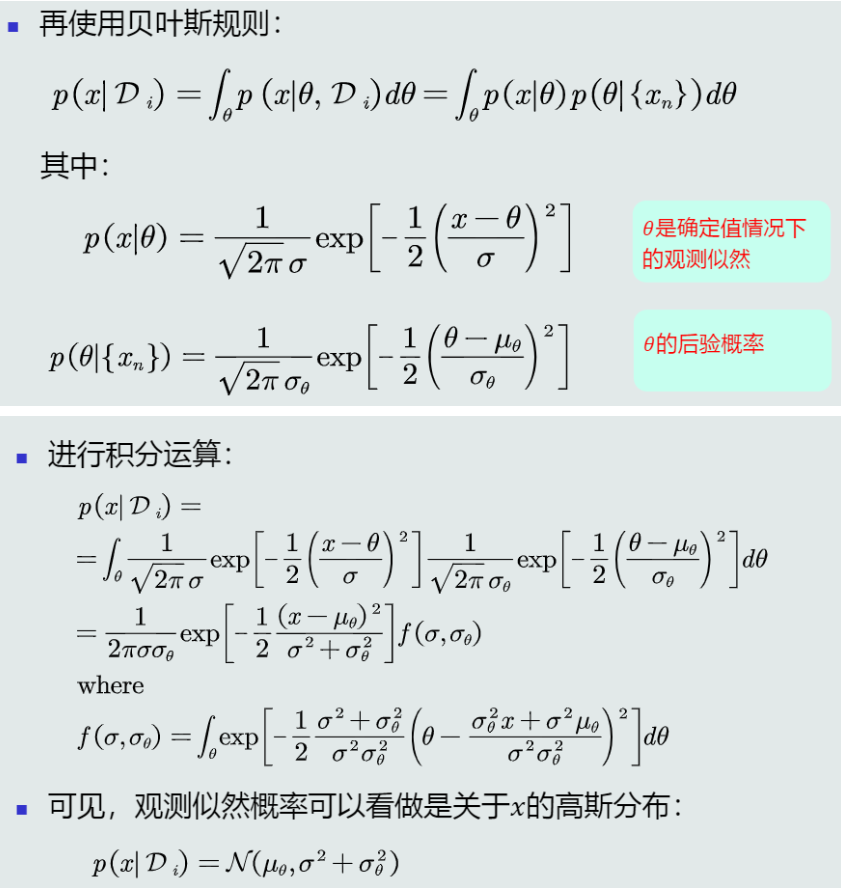
高斯观测似然:
-
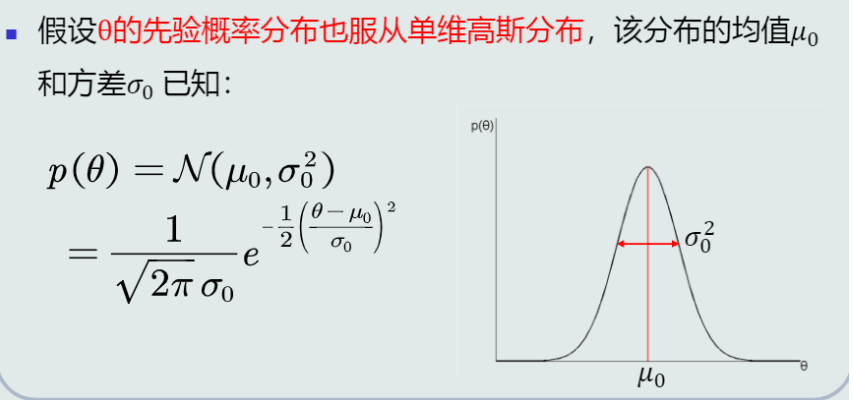
参数的先验概率:
-
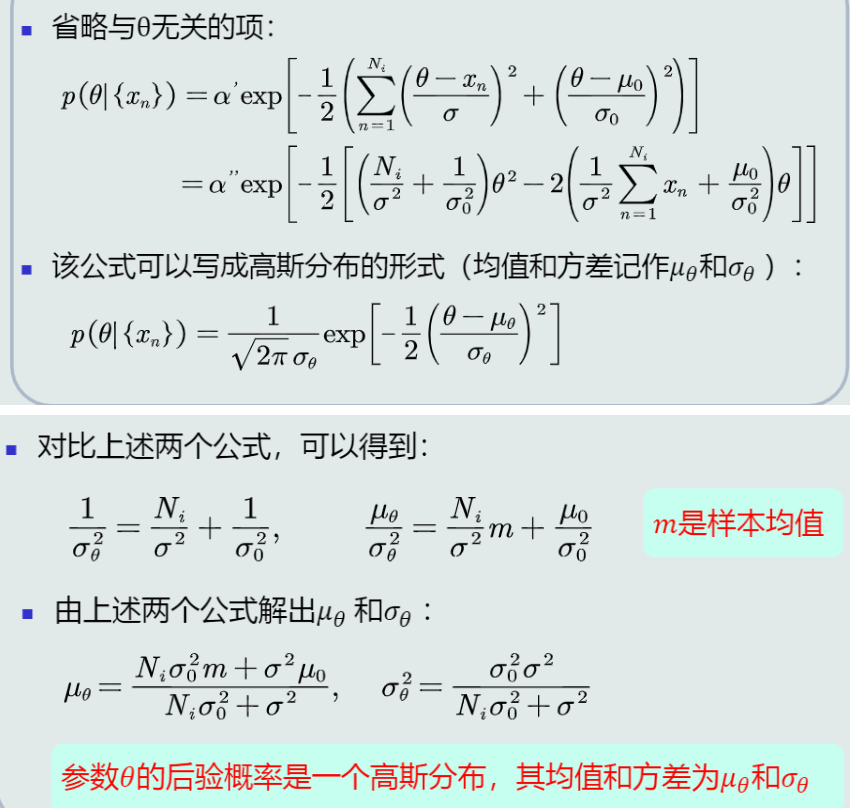
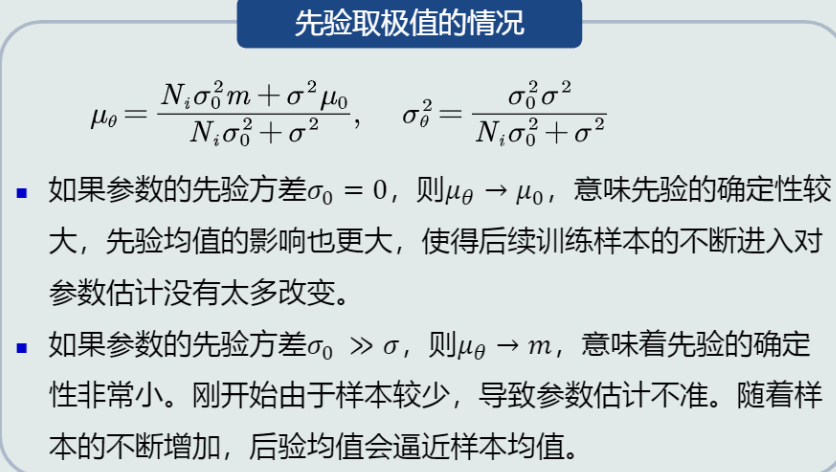
参数的后验概率(对单个类别C_i而言!):
在参数的先验概率和观测似然概率分别服从高斯分布N(\mu_0, \sigma_0^2)和N(\mu, \sigma^2)的情况下,参数的后验概率也服从高斯分布N(\mu_\theta, \sigma_\theta^2)。(其中,\mu = \theta,待估计参数\theta就是高斯分布的均值\mu)
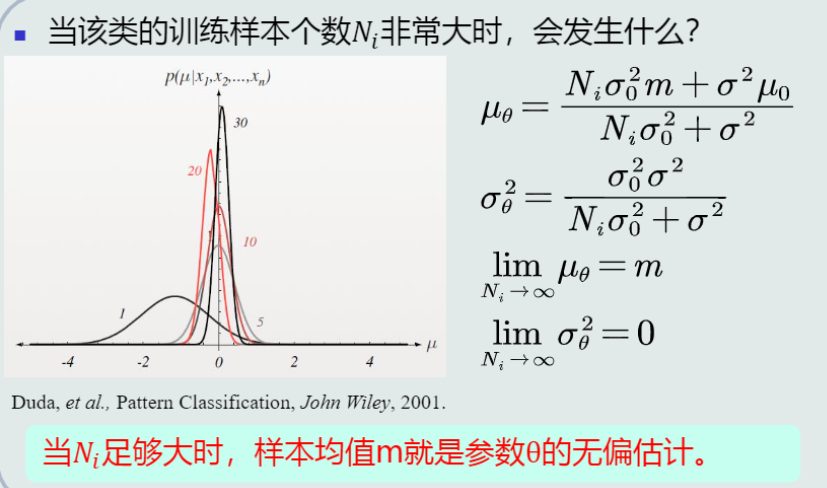
当C_i类的样本个数N_i足够大时,\mu_\theta趋向于样本均值,\sigma_\theta^2趋向于0。

-
特点:
当训练样本和先验概率取极值时,从后验概率的极限值可以看出,贝叶斯估计具有不断学习的能力。
-
参数的后验概率应用于MAP分类:
给定训练样本、参数的先验概率、观测似然的分布形式,通过贝叶斯估计来估计观测似然概率,进而可以得到样本\boldsymbol {x}属于类C_i的后验概率用于决策。
-
贝叶斯估计与最大似然估计比较:
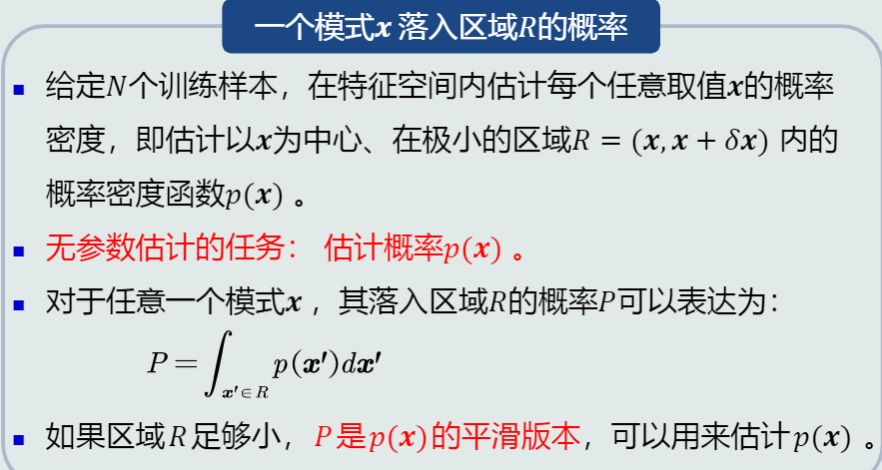
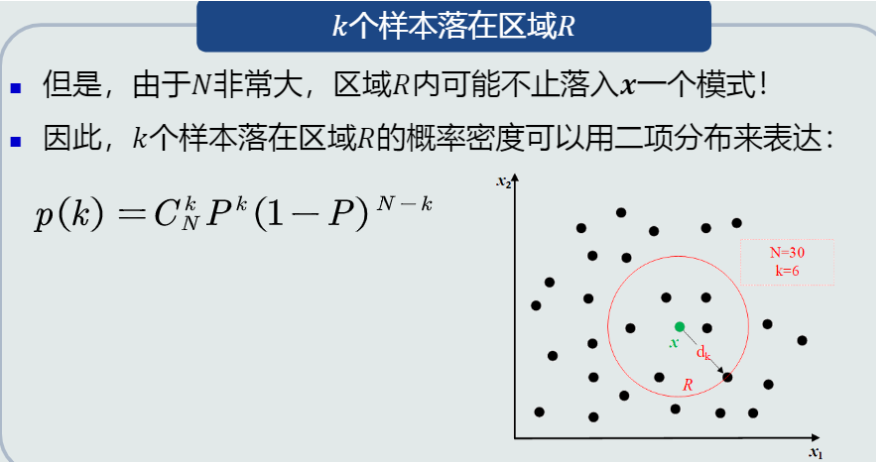
4. 概率密度估计基本理论
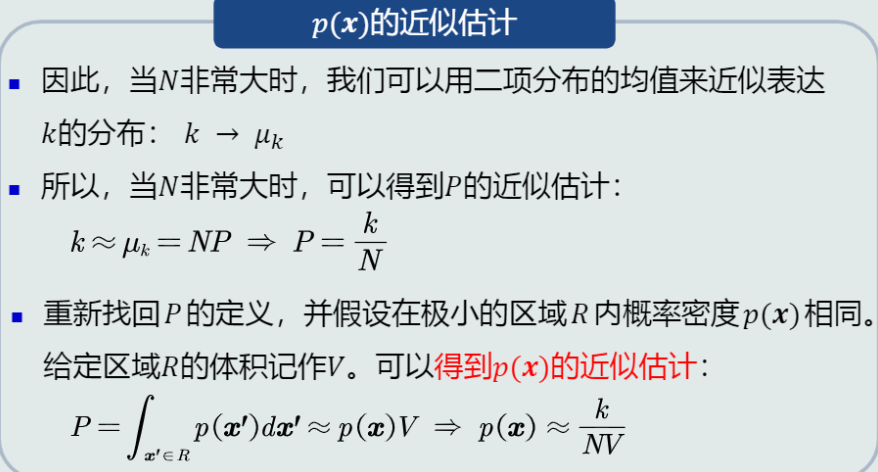
概率密度估计的重要公式:p(\boldsymbol{x}) \approx \frac{k}{NV}。
(1) KNN估计:固定k,求V
(2) 直方图估计:固定V,求k
(3) 核密度估计(KNN与直方图的折中):固定V的大小,V的位置不固定,求k
上面三种方法都分为两个阶段:统计学习阶段与概率密度估计阶段。
5. K近邻(KNN)估计

- KNN分类器(基于KNN估计的MAP分类器):

-
优点:
(1) 可以自适应的确定\boldsymbol{x}相关的区域R的范围
-
缺点:
(1) KNN概率密度估计不是连续函数
(2) 不是真正的概率密度表达,概率密度函数的积分是\infin,而不是1
(3) 在测试阶段,仍然需要存储训练样本
(4) 区域R由第k个近邻点确定,易受噪声影响
6. 直方图估计
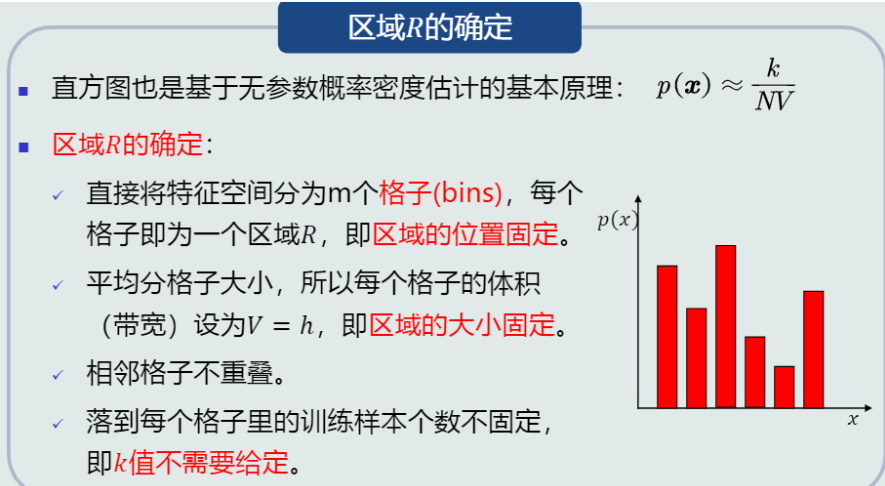

-
优点:
(1) 固定区域R,减少由于噪声影响造成的估计误差
(2) 不需要存储训练样本
-
缺点:
(1) 固定区域R的位置,意味着当前格子不是以样本\boldsymbol{x}为中心,导致统计和概率估计不准确
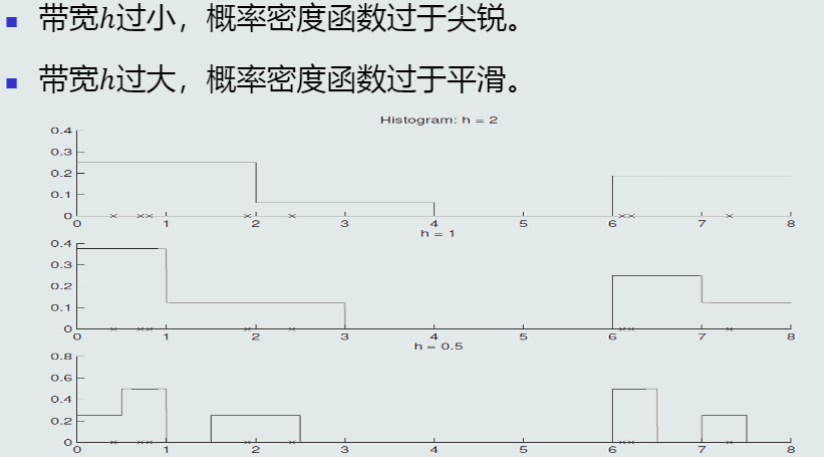
(2) 固定区域R的大小,缺乏概率估计的自适应能力,导致概率密度函数过于尖锐或平滑
-
双线性插值(直方图估计的优化):
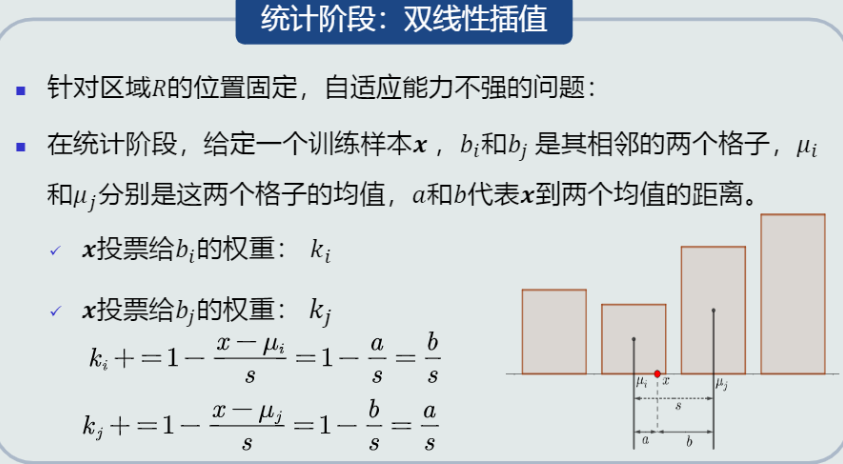
\boldsymbol{x}向相邻两个格子都贡献一部分k值(和为1),与格子中心越近则贡献越多。
-
带宽h的选择:
不宜过大,也不宜过小
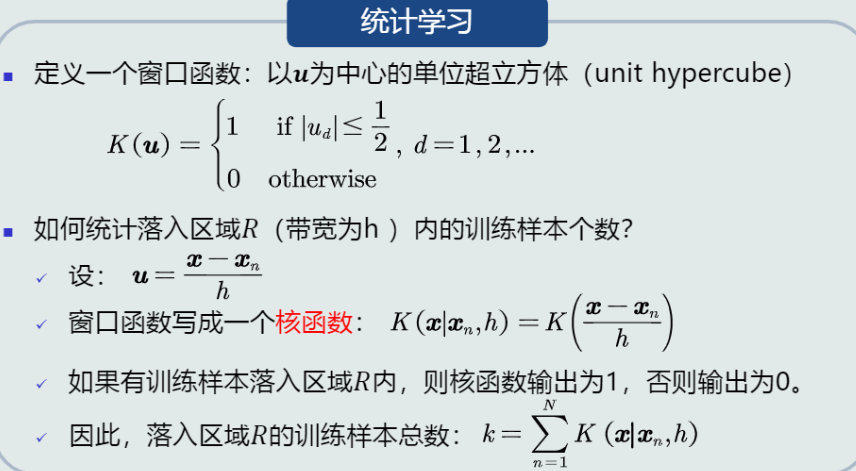
7. 核密度估计
KNN估计与直方图估计各有优缺点,且他们共同的缺点是概率密度估计不连续,不符合概率密度函数的定义。核密度估计在一定程度上结合了KNN与直方图的优点。
核密度估计中,区域R是一个单位超立方体,由核函数来确定,核函数可以是高斯分布、均匀分布、三角分布等,但核函数必须是对称函数。当选择的核函数是连续函数(比如高斯核函数)时,估计的概率密度是连续的。


-
优点:
(1) 以待估计样本\boldsymbol{x}为中心、自适应确定区域R的位置(类似KNN)
(2) 适用所有训练样本,而不是基于第k个近邻点来估计概率密度,从而克服KNN估计存在的噪声影响
(3) 若核函数是连续的,则估计的概率密度函数也是连续的
-
缺点:
(1) 与KNN估计一样,在测试阶段,核密度估计也需要存储所有训练样本
-
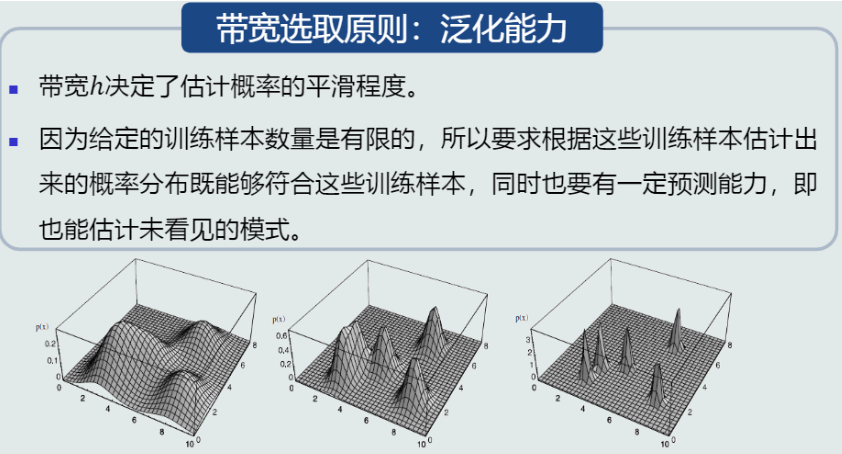
带宽选择:
带宽h决定了估计概率的平滑程度,选取带宽的原则是泛化能力的好坏



【推荐】还在用 ECharts 开发大屏?试试这款永久免费的开源 BI 工具!
【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 从二进制到误差:逐行拆解C语言浮点运算中的4008175468544之谜
· .NET制作智能桌面机器人:结合BotSharp智能体框架开发语音交互
· 软件产品开发中常见的10个问题及处理方法
· .NET 原生驾驭 AI 新基建实战系列:向量数据库的应用与畅想
· 从问题排查到源码分析:ActiveMQ消费端频繁日志刷屏的秘密
· C# 13 中的新增功能实操
· 万字长文详解Text-to-SQL
· Ollama本地部署大模型总结
· 【杭电多校比赛记录】2025“钉耙编程”中国大学生算法设计春季联赛(4)
· 卧槽!C 语言宏定义原来可以玩出这些花样?高手必看!