

CH395实现主动ping对端功能(代码及说明)
PING是基于ICMP(Internet Control Message Protocol)协议工作的。ICMP报文是封装在IP包中,工作在网络层。
ICMP包头的类型字段有2类,一类是查询报文,用于检测通信链路是否正常;一类是差错报文,通知出错原因。
回送消息是用于进行通信的主机间,判断所发的数据包是否已经成功到达对端的一种消息,ping命令就是利用这个消息实现的:可以向对端发送回送请求的消息(request,8),也可以接收对端主机发送回来的应答(reply,0)
| Type(8位) | Code(8位) |
| Checksum(16位) | |
| Identifier(16位) | |
| Sequence Number(16位) | |
| 选项数据 | |
Type(类型):0代表回送应答,8代表回送请求
Code(代码):值为0
Checksum(校验和)
Identifier(标识符):Unix系统在实现ping程序时,把ICMP报文中的标识符字段设置成发送进程的PID号
Sequence Number(序号):从0开始,每发送一次新的请求就加1
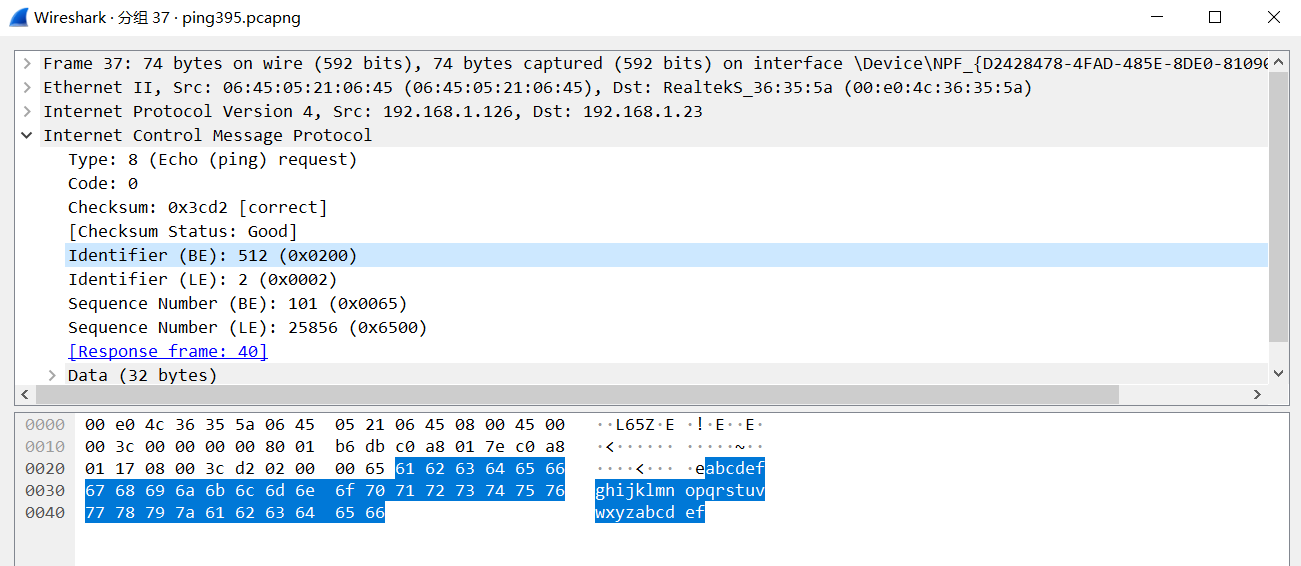
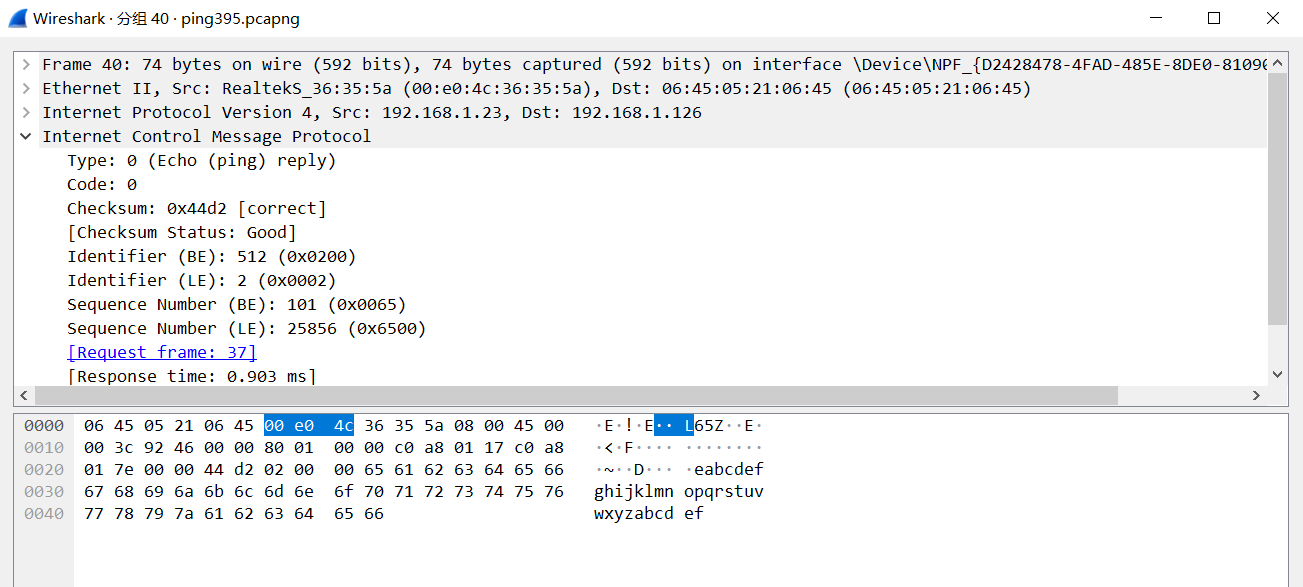
抓包:
请求包(Response frame:40 表示应答此请求的reply包是N0.40这一包)
应答包(Request frame:37 表示此包是对N0.37这一请求包的应答)
①执行ping 192.168.x.x命令后,源主机会先构建一个ICMP请求消息数据包(类型为8)
②由ICMP协议将这个数据包连同192.168.x.x这一地址一起交给IP层。IP层将以192.168.x.x作为目的地址,本地ip地址作为源地址,协议字段置为1表示是ICMP协议,再加上一些其他的信息构建成一个IP数据包。
③之后,需要加入MAC头,如果在本地ARP映射表中能直接查到192.168.x.x这一地址所对应的MAC地址,则可以直接使用。在获取MAC地址后,由数据链路层构建一个数据帧,其中,目的地址是刚刚找到的MAC地址,源地址是本机的MAC地址。
④对端设备收到这个数据帧后,将其中的目的MAC地址和自己的本地MAC地址对比,如果符合则接收,不符合就丢弃。如果MAC地址符合,那么提取出IP数据包,经IP层检查后,再提取出有用的相关信息给ICMP协议。
⑤识别出这是一个ping请求帧后,将构建一个ICMP应答包(类型为0),经过同样的流程传给发送请求包的主机。
1.设置395相关网络参数及对端,将ip包协议字段置为1,表示为Internet控制消息 (ICMP)协议类型。
1 /* CH395相关定义 */ 2 const UINT8 CH395IPAddr[4] = {192,168,1,126}; /* CH395IP地址 */ 3 const UINT8 CH395GWIPAddr[4] = {192,168,1,1}; /* CH395网关 */ 4 const UINT8 CH395IPMask[4] = {255,255,255,0}; /* CH395子网掩码 */ 5 const UINT8 DestIPAddr[4] = {192,168,1,23}; /* 目的IP */ 6 const UINT8 IPRawProto = 1; /* IP包协议类型 */

2.初始化395和socket的参数,并将socket设置为ipraw模式。(关于ipraw模式的介绍和使用可以查阅CH395的官方手册)

1 /********************************************************************************** 2 * Function Name : InitCH395InfParam 3 * Description : 初始化CH395Inf参数 4 * Input : None 5 * Output : None 6 * Return : None 7 **********************************************************************************/ 8 void InitCH395InfParam(void) 9 { 10 memset(&CH395Inf,0,sizeof(CH395Inf)); /* 将CH395Inf全部清零*/ 11 memcpy(CH395Inf.IPAddr,CH395IPAddr,sizeof(CH395IPAddr)); /* 将IP地址写入CH395Inf中 */ 12 memcpy(CH395Inf.GWIPAddr,CH395GWIPAddr,sizeof(CH395GWIPAddr)); /* 将网关IP地址写入CH395Inf中 */ 13 memcpy(CH395Inf.MASKAddr,CH395IPMask,sizeof(CH395IPMask)); /* 将子网掩码写入CH395Inf中 */ 14 } 15 16 /********************************************************************************** 17 * Function Name : InitSocketParam 18 * Description : 初始化socket 19 * Input : None 20 * Output : None 21 * Return : None 22 **********************************************************************************/ 23 void InitSocketParam(void) 24 { 25 memset(&SockInf,0,sizeof(SockInf)); /* 将SockInf[0]全部清零*/ 26 memcpy(SockInf.IPAddr,DestIPAddr,sizeof(DestIPAddr)); /* 将目的IP地址写入 */ 27 SockInf.ProtoType = PROTO_TYPE_IP_RAW; /* IP RAW模式 */ 28 SockInf.IPRAWProtoType = IPRawProto; 29 } 30 31 /********************************************************************************** 32 * Function Name : CH395SocketInitOpen 33 * Description : 配置CH395 socket 参数,初始化并打开socket 34 * Input : None 35 * Output : None 36 * Return : None 37 **********************************************************************************/ 38 void CH395SocketInitOpen(void) 39 { 40 UINT8 i; 41 /* socket 0为IP RAW模式 */ 42 CH395SetSocketDesIP(0,SockInf.IPAddr); /* 设置socket 0目标IP地址 */ 43 CH395SetSocketProtType(0,SockInf.ProtoType); /* 设置socket 0协议类型 */ 44 CH395SetSocketIPRAWProto(0,SockInf.IPRAWProtoType); /* 设置协议字段 */ 45 46 i = CH395OpenSocket(0); /* 打开socket 0 */ 47 mStopIfError(i); /* 检查是否成功 */ /* 检查是否成功 */ 48 }
3.在socket的接收中断中,调用 CH395GetRecvLength()函数获取当前缓冲区中的数据长度,在调用CH395GetRecvData()函数读取数据,最后调用 CH395IcmpRecvData()函数对收到的ping包处理和分析。
1 /********************************************************************************** 2 * Function Name : CH395SocketInterrupt 3 * Description : CH395 socket 中断,在全局中断中被调用 4 * Input : sockindex 5 * Output : None 6 * Return : None 7 **********************************************************************************/ 8 void CH395SocketInterrupt(UINT8 sockindex) 9 { 10 UINT8 sock_int_socket; 11 12 UINT16 len; 13 14 sock_int_socket = CH395GetSocketInt(sockindex); /* 获取socket 的中断状态 */ 15 // printf("SOCK status : %02x\n",sock_int_socket); 16 if(sock_int_socket & SINT_STAT_SENBUF_FREE) /* 发送缓冲区空闲,可以继续写入要发送的数据 */ 17 { 18 } 19 if(sock_int_socket & SINT_STAT_SEND_OK) /* 发送完成中断 */ 20 { 21 IcmpSuc++; 22 } 23 if(sock_int_socket & SINT_STAT_RECV) /* 接收中断 */ 24 { 25 printf("recv back!\r\n"); 26 len = CH395GetRecvLength(sockindex); /* 获取当前缓冲区内数据长度 */ 27 if(len == 0)return; 28 if(len > 512) len = 512; 29 CH395GetRecvData(sockindex,len,MyBuffer); /* 读取数据 */ 30 CH395IcmpRecvData(len,MyBuffer); 31 } 32 if(sock_int_socket & SINT_STAT_CONNECT) /* 连接中断,仅在TCP模式下有效*/ 33 { 34 35 } 36 if(sock_int_socket & SINT_STAT_DISCONNECT) /* 断开中断,仅在TCP模式下有效 */ 37 { 38 } 39 if(sock_int_socket & SINT_STAT_TIM_OUT) /* 超时中断 */ 40 { 41 } 42 }
4.在CH395PINGInit()函数中,进行引脚初始化、复位395、初始化395、初始化socket、打开socket等操作。
调用 CH395EnablePing(1)函数开启ping功能(默认开启)
InitParameter()--- PING参数变量初始化
InitPing()--- PING初始化,生成ping查询报文
1 /********************************************************************************** 2 * Function Name : main 3 * Description : main主函数 4 * Input : None 5 * Output : None 6 * Return : None 7 **********************************************************************************/ 8 void CH395PINGInit(void) 9 { 10 UINT8 i; 11 Delay_Ms(100); 12 printf("CH395EVT Test Demo\n"); 13 CH395_PORT_INIT(); 14 CH395CMDReset(); /* 复位CH395芯片 */ 15 Delay_Ms(1000); /* 延时1000毫秒,要分开写,否则无效 */ 16 17 i = CH395CMDGetVer(); /*获取芯片以及固件版本号 */ 18 printf("固件版本号:%02x\n",i); 19 InitCH395InfParam(); /* 初始化CH395相关变量 */ 20 i = CH395Init(); /* 初始化CH395芯片 */ 21 printf("CH395Init:%02x\n",i); 22 mStopIfError(i); 23 24 while(1) 25 { /* 等待以太网连接成功*/ 26 if(CH395CMDGetPHYStatus() == PHY_DISCONN) /* 查询CH395是否连接 */ 27 { 28 printf("CH395 DISCONN\n"); 29 Delay_Ms(200); /* 未连接则等待200MS后再次查询 */ 30 } 31 else 32 { 33 printf("CH395 Connect Ethernet\n"); /* CH395芯片连接到以太网,此时会产生中断 */ 34 break; 35 } 36 } 37 InitSocketParam(); // /* 初始化socket相关变量 */ 38 CH395SocketInitOpen();// 39 40 //CH395EnablePing(1);//默认开启 41 InitParameter(); 42 InitPing(); 43 printf("!!\r\n"); 44 // TIM2_Init(); 45 // Intervalometer_4ms(); 46 }
1 /********************************************************************************** 2 * Function Name : InitParameter 3 * Description : Ping参数初始化 4 * Input : None 5 * Output : None 6 * Return : None 7 **********************************************************************************/ 8 void InitParameter( void ) 9 { 10 UNREACH_COUNT=0; 11 TIMOUT_COUNT=0; 12 SUCRECV_COUNT=0; 13 IcmpCont=0; 14 IcmpSeq=0; 15 IcmpSuc=0;/// 16 icmp_tmp=0; 17 CH395GetIPInf(CH395INF_BUF); 18 } 19 20 /********************************************************************************** 21 * Function Name : InitPing 22 * Description : Ping初始化 23 * Input : None 24 * Output : None 25 * Return : None 26 **********************************************************************************/ 27 void InitPing( void ) 28 { 29 IcmpHeader head; 30 UINT32 check_sum=0; 31 UINT8 i; 32 33 IcmpCont++; 34 IcmpSeq += 1; 35 head.i_type = ICMP_HEAD_TYPE;//8 36 head.i_code = ICMP_HEAD_CODE;//0 37 head.i_id = ICMP_HEAD_ID;//512 38 head.i_seq = ICMP_HEAD_SEQ+IcmpSeq;//100+ 39 memset(head.i_data,0,sizeof(head.i_data)); 40 41 for( i=0;i<ICMP_DATA_BYTES;i++ ){//32 42 if(i<26) 43 head.i_data[i] = i + 'a'; 44 else 45 head.i_data[i] = i + 'a' - 26; 46 if(i%2==0) 47 check_sum += head.i_data[i]<<8; 48 else 49 check_sum += head.i_data[i]; 50 } 51 check_sum += head.i_type<<8; 52 check_sum += head.i_code; 53 check_sum += head.i_id; 54 check_sum += head.i_seq; 55 head.i_cksum = check_sum>>16; 56 head.i_cksum += check_sum&0xffff; 57 head.i_cksum = 0xffff - head.i_cksum; 58 memset(SEND_BUF,0,sizeof(SEND_BUF)); 59 memcpy(SEND_BUF,&head,sizeof(head)); 60 61 SEND_BUF[2] = head.i_cksum >> 8; 62 SEND_BUF[3] = head.i_cksum & 0xff; 63 SEND_BUF[4] = head.i_id >> 8; 64 SEND_BUF[5] = head.i_id & 0xff; 65 SEND_BUF[6] = head.i_seq >> 8; 66 SEND_BUF[7] = head.i_seq & 0xff; 67 }
5.在main函数中,通过 CH395SendData()函数发送 InitPing()函数生成的40字节的数据,简单实现按键按一下发送一次ping请求包。
1 /********************************************************************************** 2 * Function Name : main 3 * Description : main主函数 4 * Input : None 5 * Output : None 6 * Return : None 7 **********************************************************************************/ 8 int main(void) 9 { 10 11 Delay_Init(); 12 USART_Printf_Init(115200); 13 Delay_Ms(100); 14 /* 延时100毫秒 */ 15 GPIO_Toggle_INIT_C(); 16 CH395PINGInit(); 17 // 18 //Delay_Ms(2000); 19 //CH395SendData(0,MyBuffer1,2); 20 //Delay_Ms(20); 21 // CH395SendData( 0,SEND_BUF,40 ); 22 // Delay_Ms(20); 23 // CH395SendData( 0,SEND_BUF,40 ); 24 // 25 // Delay_Ms(20); 26 // CH395SendData( 0,SEND_BUF,40 ); 27 // Delay_Ms(20); 28 // CH395SendData( 0,SEND_BUF,40 ); 29 while(1) 30 { 31 if(CH395_INT_WIRE == 0) 32 { 33 CH395GlobalInterrupt(); 34 } 35 if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_12) == RESET) 36 { 37 Delay_Ms(2); 38 if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_12) == RESET) 39 { 40 printf("PING %d times\r\n",++t); 41 CH395SendData( 0,SEND_BUF,40 ); 42 while(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_12) == RESET); 43 } 44 } 45 // CH395SendData( 0,SEND_BUF,40 ); 46 // Delay_Ms(1500); 47 /*查询状态执行相应命令*/ 48 // CH395_PINGCmd(); 49 // InitPing(); 50 } 51 }
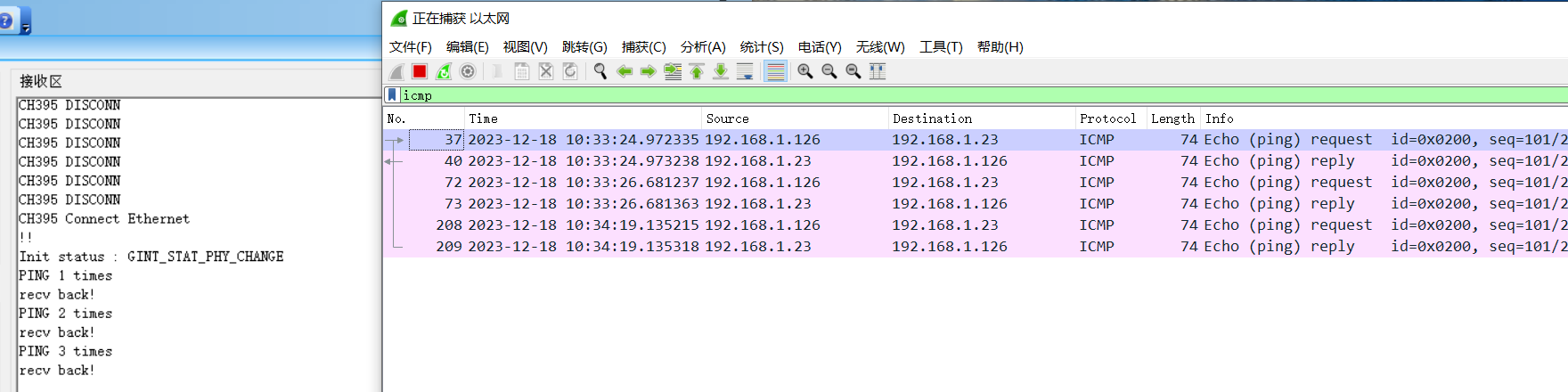
效果如下,按下按键发送一次ping请求包,对端reply一包数据。(一共发了3次ping_request,成功进入socket接收中断接收处理回包)
工程代码及抓包:https://files.cnblogs.com/files/blogs/808422/CH395_%E4%B8%BB%E5%8A%A8ping.zip?t=1702869711&download=true



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具