【原创】Linux虚拟化KVM-Qemu分析(六)之中断虚拟化
背景
Read the fucking source code!--By 鲁迅A picture is worth a thousand words.--By 高尔基
说明:
- KVM版本:5.9.1
- QEMU版本:5.0.0
- 工具:Source Insight 3.5, Visio
- 文章同步在博客园:
https://www.cnblogs.com/LoyenWang/
1. 概述
本文会将ARM GICv2中断虚拟化的总体框架和流程讲清楚,这个曾经困扰我好几天的问题在被捋清的那一刻,让我有点每有会意,欣然忘食的感觉。
在讲述中断虚拟化之前,我们应该对中断的作用与处理流程有个大致的了解:
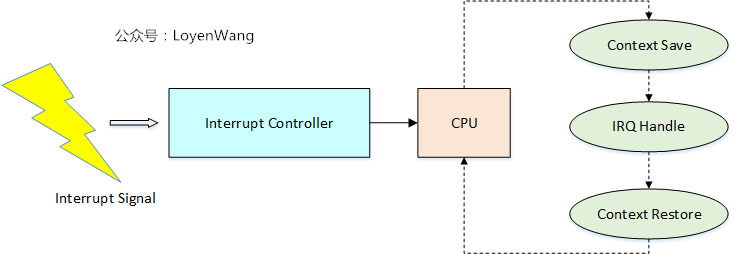
- 中断是处理器用于异步处理外围设备请求的一种机制;
- 外设通过硬件管脚连接在中断控制器上,并通过电信号向中断控制器发送请求;
- 中断控制器将外设的中断请求路由到CPU上;
- CPU(以ARM为例)进行模式切换(切换到IRQ/FIQ),保存Context后,根据外设的中断号去查找系统中已经注册好的Handler进行处理,处理完成后再将Context进行恢复,接着之前打断的执行流继续move on;
- 中断的作用不局限于外设的处理,系统的调度,SMP核间交互等,都离不开中断;
中断虚拟化,将从中断信号产生到路由到vCPU的角度来展开,包含以下三种情况:
- 物理设备产生中断信号,路由到vCPU;
- 虚拟外设产生中断信号,路由到vCPU;
- Guest OS中CPU之间产生中断信号(IPI中断);
本文将围绕ARM-GICv2来描述,因此也不会涉及到MSI以及ITS等特性,带着问题出发吧。
2. VGIC
- 在讲中断虚拟化之前,有必要先讲一下ARMv8中Hypervisor的架构,因为涉及到不同的Exception Level的切换;
- 在我阅读源代码时,根据代码去匹配某篇Paper中的理论时,出现了一些理解偏差,曾一度困扰了我好几天;

Non-VHE- Linux ARM架构的Hypervisor在引入时,采用的是左图中的系统架构,以便能充分利用Linux现有的机制,比如scheduler等;
- KVM/ARM的实现采用了
split模式,分成Highvisor和Lowvisor,这样可以充分利用ARM处理器不同模式的好处,比如,Highvisor可以利用Linux Kernel的现有机制,而Lowvisor又可以利用Hyp Mode的特权。此外,带来的好处还包含了不需要大量修改Linux内核的代码,这个在刚引入的时候是更容易被社区所接受的; Lowvisor有三个关键功能:1)对不同的执行Context进行隔离与保护,比如VM之间不会相互影响;2)提供Guest和Host的相互切换,也就是所谓的world switch;3)提供一个虚拟化trap handler,用于处理trap到Hypervisor的中断和异常;
VHEVHE: Virtualization Host Extensions,用于支持Host OS运行在EL2上,Hypervisor和Host OS都运行在EL2,可以减少Context切换带来的开销;- 目前
Cortex-A55, Cortex-A75, Cortex-A76支持VHE,其中VHE的控制是通过HCR_EL2寄存器的操作来实现的;
再补充一个知识点:
- Host如果运行在EL1时,可以通过
HVC(Hypervisor Call)指令,主动trap到EL2中,从而由Hypervisor来接管; - Guest OS可以配置成当有中断或异常时trap到EL2中,在中断或异常产生时,trap到EL2中,从而由Hypervisor来接管;
- EL2可以通过
eret指令,退回到EL1;
本文的讨论基于Non-VHE系统。
2.1 GIC虚拟化支持
GICv2硬件支持虚拟化,来一张旧图:

先看一下物理GIC的功能模块:
- GIC分成两部分:
Distributor和CPU Interfaces,Distributor和CPU Interfaces都是通过MMIO的方式来进行访问; Distributor用于配置GIC,比如中断的enable与disable,SMP中的IPI中断、CPU affinity,优先级处理等;CPU Interfaces用于连接CPU,进行中断的ACK(Acknowledge)以及EOI(End-Of-Interrupt)信号处理等,比如当CPU收到中断信号时,会通过CPU Interfaces进行ACK回应,并且在处理完中断后写入EOI寄存器,而在写EOI之前将不再收到该中断;
简化图如下:

GICv2,提供了硬件上的虚拟化支持,也就是虚拟GIC(VGIC),从而中断的接收不需要通过Hypervisor来软件模拟:
- 针对每个vCPU,VGIC引入了
VGIC CPU Interfaces和对应的Hypervisor控制接口; - 可以通过写Hypervisor控制接口中的LR(List Register)寄存器来产生虚拟中断,
VGIC CPU Interface会将虚拟中断信号送入到Guest中; VGIC CPU Interface支持ACK和EOI,因此这些操作也不需要trap到Hypervisor中来通过软件进行模拟,也减少了CPU接收中断的overhead;Distributor仍然需要trap到Hypervisor中来进行软件模拟,比如,当某个vCPU需要发送虚拟IPI到另一个vCPU时,此时是需要Distributor来辅助完成功能的,这个过程就需要trap到Hypervisor;
2.2 虚拟中断产生流程
本文开始提到的三种中断信号源,如下图所示:
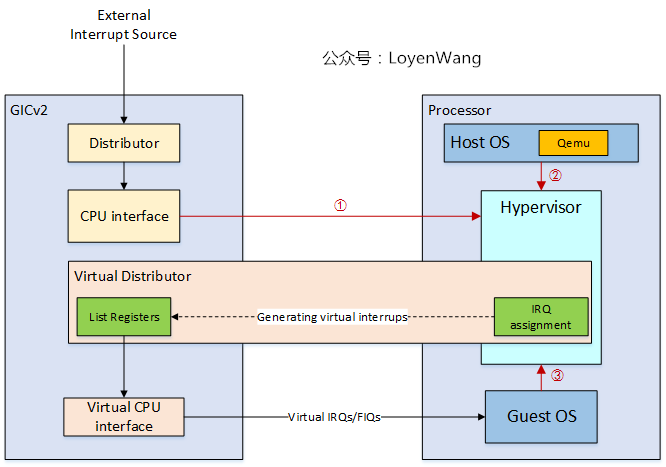
- ①:物理外设产生虚拟中断流程:
- 外设中断信号(Hypervisor已经将其配置成虚拟中断)到达GIC;
- GIC Distributor将该物理IRQ发送至CPU;
- CPU trap到Hyp模式,此时将会退出Guest OS的运行,并返回到Host OS;
- Host OS将响应该物理中断,也就是Host OS驱动响应外设中断信号;
- Hypervisor往
List Register写入虚拟中断,Virtual CPU interface将virtual irq信号发送至vCPU; - CPU将处理该异常,Guest OS会从Virtual CPU Interface读取中断状态进行响应;
- ②:虚拟外设产生虚拟中断流程:
- Qemu模拟外设,通过
irqfd来触发Hypervisor进行中断注入; - Hypervisor往
List Register写入虚拟中断,Virtual CPU interface将virtual irq信号发送至vCPU; - CPU将处理该异常,Guest OS会从Virtual CPU Interface读取中断状态进行响应;
- Qemu模拟外设,通过
- ③:vCPU IPI中断流程:
- Guest OS访问Virtual Distributor,触发异常,trap到Hypervisor;
- Hypervisor进行IO异常响应,并最终将虚拟中断写入到List Register中,Virtual CPU interface将virtual irq信号发送至vCPU;
- CPU将处理该异常,Guest OS会从Virtual CPU Interface读取中断状态进行响应;
上述描述的流程,实际中需要和虚拟外设去交互,包括虚拟外设框架(比如VFIO)等,而本文只是从中断的角度来分析,省去了外设部分。
理论部分讲完了,下边就开始从源码中去印证理论了。
3. 软件实现流程
3.1 VGIC初始化
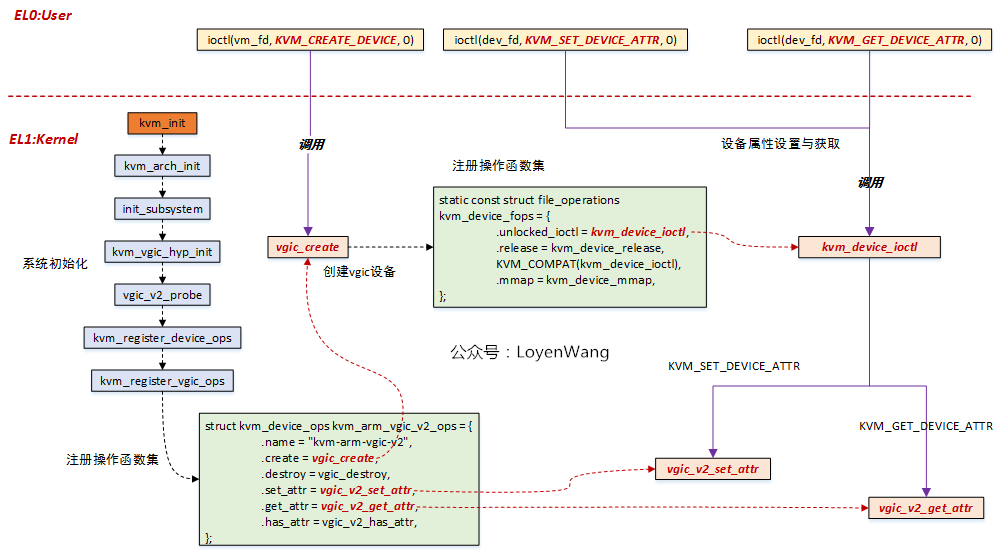
kvm_init为总入口,进入vgic_v2_probe函数,完成GICv2的初始化操作,此处还会跟GICV2内核中的驱动交互,去获取gic_kvm_info信息,主要包括基地址信息等,便于后续操作中去进行配置操作;- 从蓝色部分的函数调用可以看出,初始化完成后,会注册一个
kvm_device_ops的操作函数集,以便响应用户层的ioctl操作; - 用户层调用
ioctl(vm_fd, KVM_CREATE_DEVICE, 0),最终将调用vgic_create函数,完成VGIC设备的创建,在该创建函数中也会注册kvm_device_fops操作函数集,用于设备属性的设置和获取; - 用户层通过
ioctl(dev_fd, KVM_SET_DEVICE_ATTR, 0)/ioctl(dev_fd, KVM_GET_DEVICE_ATTR, 0)来进行属性的设置和获取,最终也会调用vgic_v2_set_attr/vgic_v2_get_attr,以便完成对VGIC的设置;
3.2 物理外设产生中断
假设你已经看过之前CPU的虚拟化文章了,按照惯例,先上图:
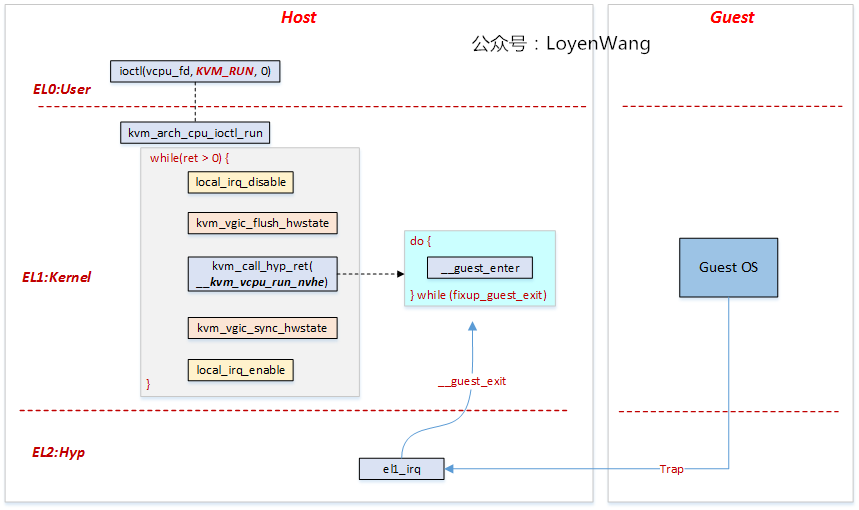
- 先来一个先决条件:
HCR_EL2.IMO设置为1,所有的IRQ都将trap到Hyp模式,因此,当Guest OS运行在vCPU上时,物理外设触发中断信号时,此时将切换到EL2,然后执行el1_irq; - 在Host中,当用户态通过
KVM_RUN控制vCPU运行时,在kvm_call_hyp_ret将触发Exception Level的切换,切换到Hyp模式并调用__kvm_vcpu_run_nvhe,在该函数中__guest_enter将切换到Guest OS的context,并最终通过eret返回到EL1,Guest OS正式开始运行; - 中断触发后
el1_irq将执行__guest_exit,这个过程将进行Context切换,也就是跳转到Host切入Guest的那个点,恢复Host的执行。注意了,这里边有个点很迷惑,el1_irq和__guest_exit的执行都是在EL2中,而Host在EL1执行,之前我一直没有找到eret来进行Exception Level的切换,最终发现原来是kvm_call_hyp_ret调用时,去异常向量表中找到对应的执行函数,实际会调用do_el2_call,在该函数中完成了Exception Level的切换,最终回到了EL1; - 切回到Host中时,当
local_irq_enable打开中断后,物理pending的中断就可以被Host欢快的响应了;
那虚拟中断是什么时候注入的呢?没错,图中的kvm_vgic_flush_hwstate会将虚拟中断注入,并且在__guest_enter切换回Guest OS时进行响应:
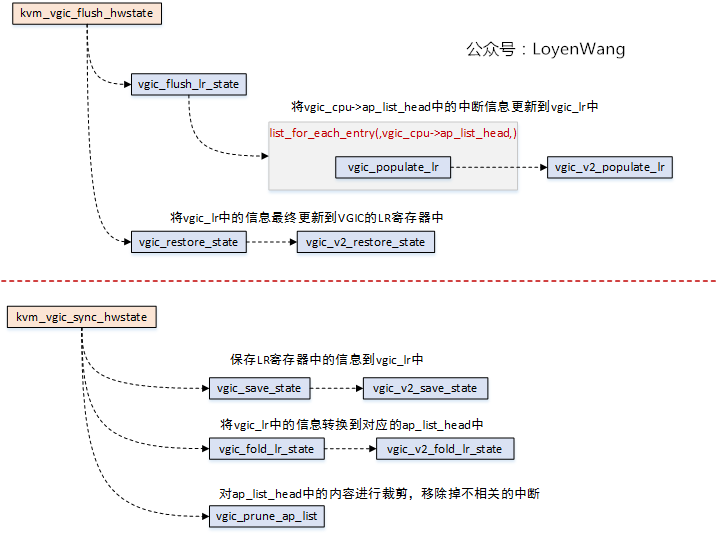
vgic_cpu结构体中的ap_list_head链表用于存放Active和Pending状态的中断,这也就是命名为ap_list_head的原因;kvm_vgic_flush_hwstate函数会遍历ap_list_head中的中断信息,并填入到vgic_lr数组中,最终会通过vgic_restore_state函数将数组中的内容更新到GIC的硬件中,也就完成了中断的注入了,当__guest_enter执行后,切换到Guest OS,便可以响应虚拟中断了;- 当从Guest OS退出后,此时需要调用
kvm_vgic_sync_hwstate,这个操作相当于kvm_vgic_flush_hwstate的逆操作,将硬件信息进行保存,并对短期内不会处理的中断进行剔除;
3.3 虚拟外设产生中断
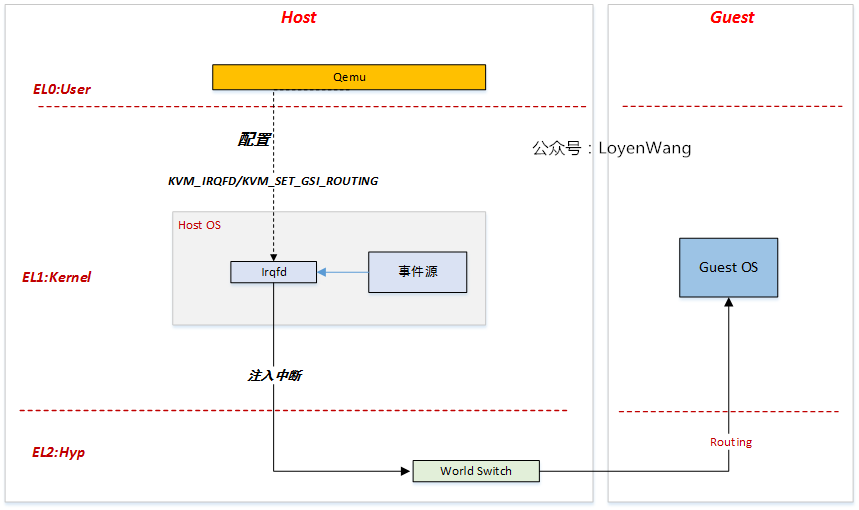
- irqfd提供了一种机制用于注入虚拟中断,而这个中断源可以来自虚拟外设;
- irqfd是基于eventfd的机制来实现的,用于用户态与内核态,以及内核态之间的事件通知;
- 事件源可以是虚拟设备,比如VFIO框架等,这个模块还没有去深入了解过,不敢妄言,后续系列会跟进;
软件流程如下图:
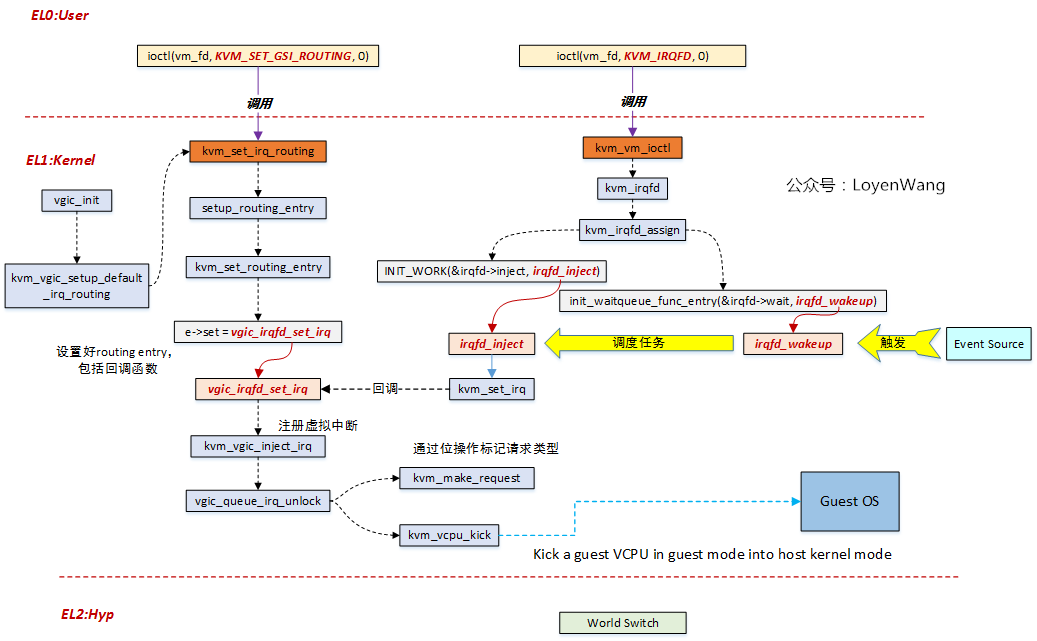
- 初始化的操作包括两部分:1)设置Routing entry(【a】vgic_init初始化的时候创建默认的entry;【b】:用户层通过KVM_SET_GSI_ROUTING来设置);2)设置irqfd;
- 初始化设置完成后,系统可以随时响应事件触发了,当事件源触发时,将调度到
irqfd_inject函数; irqfd_inject函数完成虚拟中断的注入操作,在该函数中会去回调set函数,而set函数是在Routing entry初始化的时候设置好的;- 实际的注入操作在
vgic_irqfd_set_irq函数中完成; kvm_vcpu_kick函数,将Guest OS切回到Host OS,中断注入后再切回到Guest OS就可以响应了;
3.4 vCPU IPI

- Host对VGIC的
Distributor进行了模拟,当Guest尝试访问VGIC Distributor时,将触发异常操作,trap到Hyp模式; - Hypervisor对异常进行处理,完成写入操作,并最终切回到Guest OS进行响应;
- 简单来说,Hypervisor就是要对中断进行管理,没错,就是这么强势;
软件流程如下:
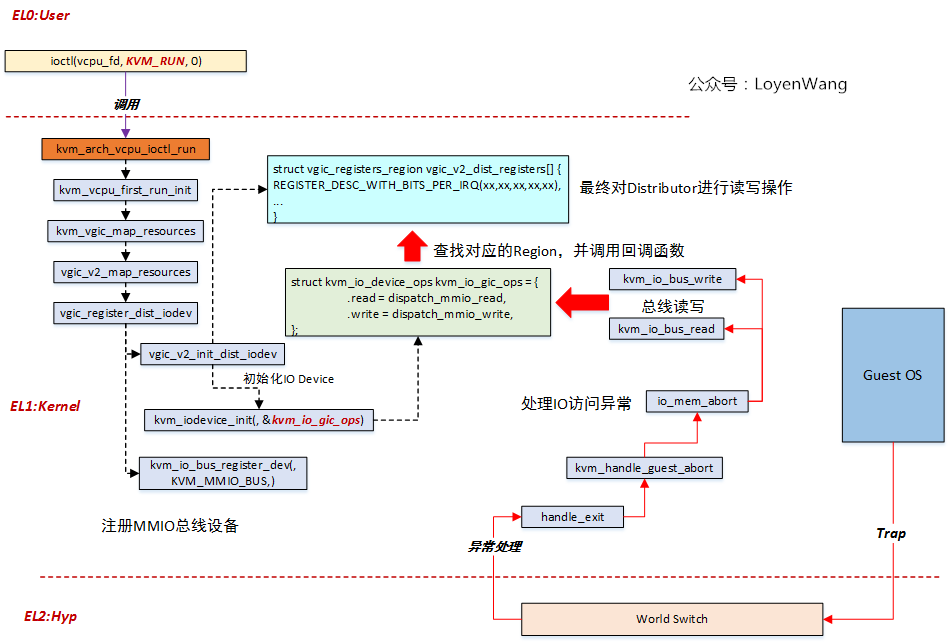
- 上层调用
ioctl(vcpu_fd, KVM_RUN, 0)时,最终将调用到vgic_register_dist_iodev函数,该函数完成的作用就是将VGIC的Distributor注册为IO设备,以便给Guest OS来进行访问; vgic_register_dist_iodev分为两个功能模块:1)初始化struct vgic_registers_region结构体字段和操作函数集;2)注册为MMIO总线设备;struct vgic_registers_region定义好了不同的寄存器区域,以及相应的读写函数,vgic_v2_dist_registers数组最终会提供给dispach_mmio_read/dispach_mmio_write函数来查询与调用;- 当Guest OS访问
Distributor时,触发IO异常并切换回Host进行处理,io_mem_abort会根据总线的类型(MMIO)去查找到对应的读写函数进行操作,也就是图中对应的dispatch_mmio_read/dispach_mmio_write函数,最终完成寄存器区域的读写; - 图中的红色线,代表的就是异常处理的执行流,可以说是一目了然了。
耗时耗力耗心血的一篇文章终于写完了,ARMv8 GICv2中断虚拟化的总体框架和流程应该算是理顺了,全网相关主题的文章并不多,希望能给带来点帮助吧。
如果对你有用的话,在看,分享,打赏三连吧。
参考
《arm_gic_architecture_specification》
《ARM_Interrupt_Virtualization》
《VM-Support-ARM》
《CoreLink GIC-400 Generic Interrupt Controller》
《Virtualization in the ARM Architecture》
https://git.kernel.org/pub/scm/linux/kernel/git/torvalds/linux.git/commit/?id=721eecbf4fe995ca94a9edec0c9843b1cc0eaaf3
欢迎关注个人公众号,不定期更新内核相关技术文章

出处:https://www.cnblogs.com/LoyenWang/
公众号:LoyenWang
版权:本文版权归作者和博客园共有
转载:欢迎转载,但未经作者同意,必须保留此段声明;必须在文章中给出原文连接;否则必究法律责任

