【原创】Linux cpufreq framework
背景
Read the fucking source code!--By 鲁迅A picture is worth a thousand words.--By 高尔基
说明:
- Kernel版本:4.14
- ARM64处理器
- 使用工具:Source Insight 3.5, Visio
1. 介绍
cpufreq子系统负责在运行时对CPU频率和电压的动态调整,以达到性能和功耗的平衡,它也叫DVFS(Dynamic Voltage Frequency Scaling)。DVFS原理:CMOS电路中功耗与电压的平方成正比,与频率也成正比。此外,频率越高,性能也越强,相应的能耗就增大了,所以Tradeoff依旧是一门艺术。cpufreq framework类似于cpuidle framework,提供机制(cpufreq driver)与策略(cpufreq governor),此外提供了cpufreq core来对机制和策略进行管理。
2. 框架
主要代码路径:
driver/cpufreq/cpufreq.c
include/linux/cpufreq.h
drivers/cpufreq/cpufreq_userspace.c
先上框架图:

粗一看与cpuidle framework的图很像,但是有些差别如下:
- 用户层与
cpufreq framework的交互,主要是通过sysfs,这个可以在/sys下看到很多文件,而Kernel Module也可以使用某些接口来回调它; - 系统只允许有一个Platform Drivers,为全局变量
cpufreq_driver,cpufreq core通过它去回调驱动; - 驱动与硬件的交互,通过如
set_clk_rate/regulator_set_voltage等接口去设置CPU的时钟和电压,而不再是cpu_ops; - 有一个全局的
governor链表cpufreq_governor_list,可以通过查找链表来选择合适的governor;
3. 数据结构
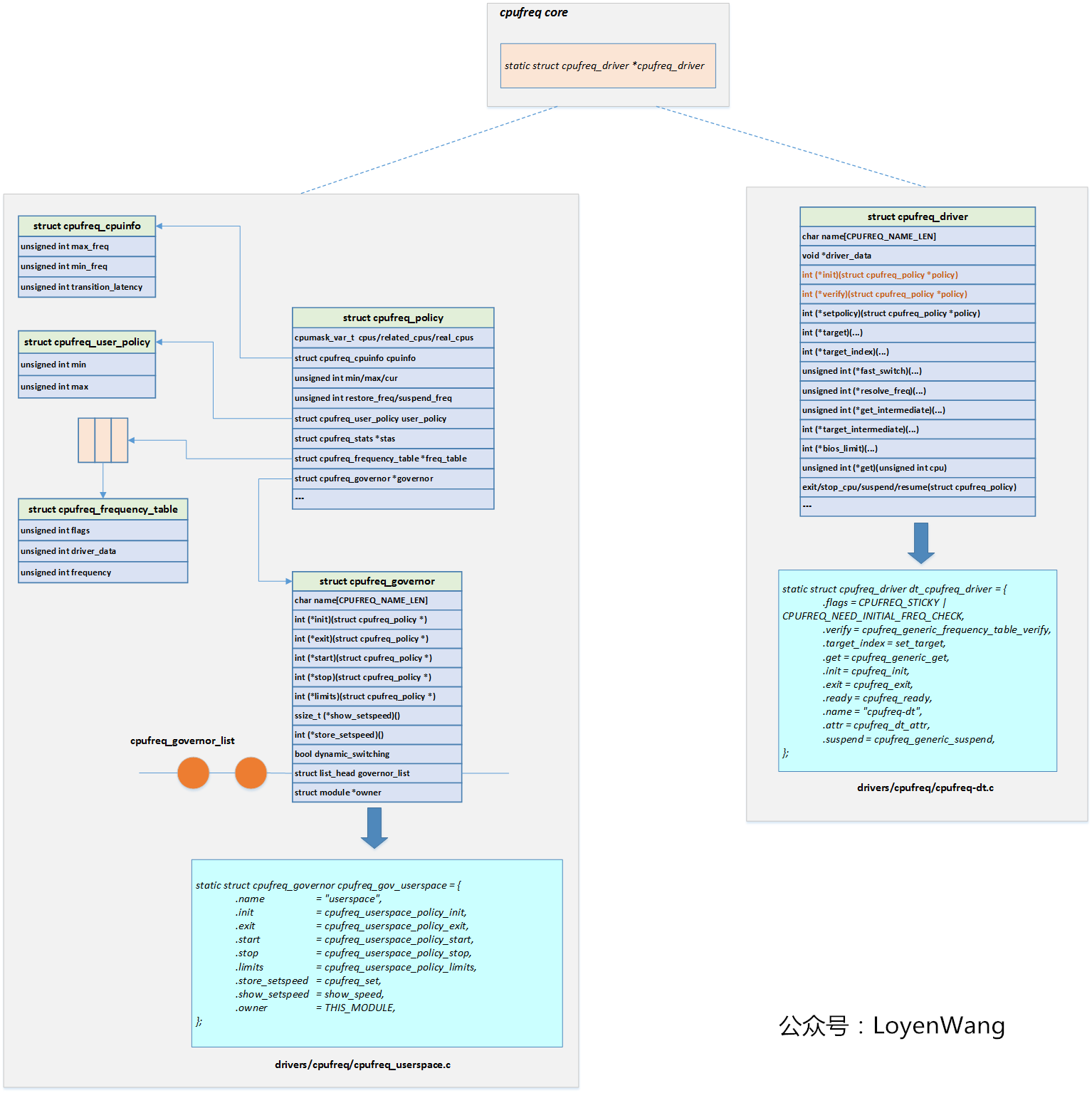
核心的数据结构有三个:
struct cpufreq_policy:用于描述不同的policy,涉及到频率表、cpuinfo等各种信息,并且每个policy都会指向某个governor;struct cpufreq_governor:用于对policy的管理;struct cpufreq_driver:用于描述具体的驱动程序;
如下图:
4. 流程
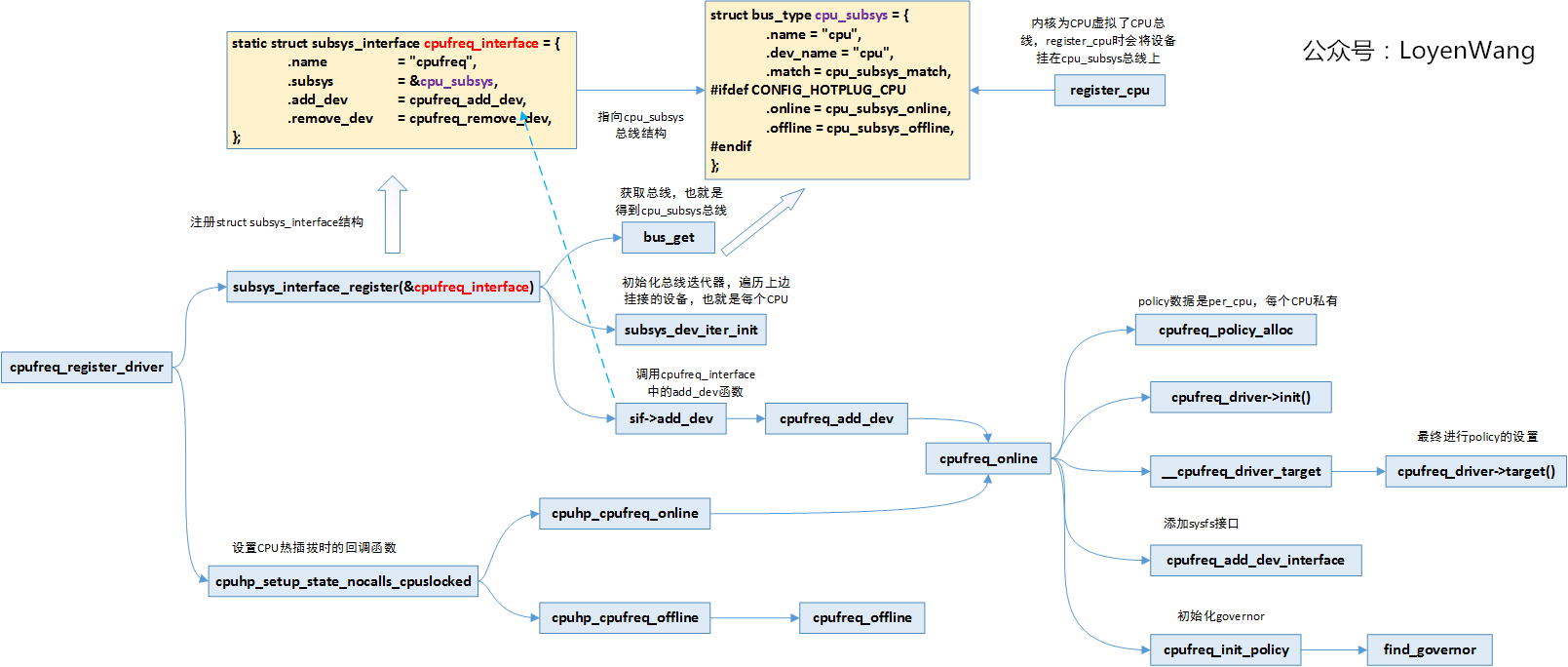
4.1 cpufreq_driver注册
仔细观察上图中struct cpufreq_driver结构体,你会发现它与传统的设备模型中的驱动结构不一致,它并没有内嵌struct bus_type或struct device_driver类型,这就决定了它不属于“device<--->bus<--->driver”这种模型。
事实上,cpufreq_driver是一个全局的变量,不属于任何一个拓扑的结构。它的注册从cpufreq_register_driver开始。
流程如下图:
4.2 governor注册
接口为:cpufreq_register_governor,这个操作实在是太简单了,添加到全局链表即可,完事!
顺带提一句吧,还有一个接口cpufreq_register_notifier,这个用于通知机制,具体不再深入分析了。
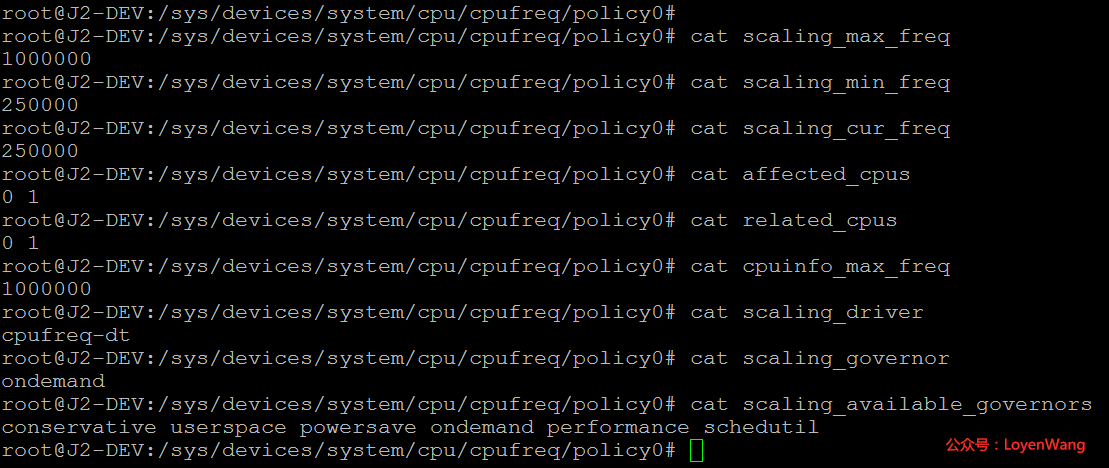
4.3 sysfs访问
cpufreq core会在/sys目录下创建相应的节点,如下图所示:

用户态可以通过cat/echo命令来读取/设置相应的值。
对应结构体如下:
static struct attribute *default_attrs[] = {
&cpuinfo_min_freq.attr,
&cpuinfo_max_freq.attr,
&cpuinfo_transition_latency.attr,
&scaling_min_freq.attr,
&scaling_max_freq.attr,
&affected_cpus.attr,
&related_cpus.attr,
&scaling_governor.attr,
&scaling_driver.attr,
&scaling_available_governors.attr,
&scaling_setspeed.attr,
NULL
};
各个字段含义如下:
affected_cpus:需要软件调整频率的cpu列表;related_cpus:需要软件或硬件来调整频率的cpu列表;cpuinfo_max_freq:CPU能够支持的最高频率(khz);cpuinfo_min_freq:CPU能够支持的最小频率(khz);cpuinfo_transition_latency:CPU频率切换时的时间开销(ns);scaling_available_governors:内核中支持的governor;scaling_driver:硬件驱动,比如cpufreq-dt;scaling_cur_freq:CPU工作频率;scaling_max_freq:当前policy的频率上限;scaling_min_freq:当前policy的频率下限;scaling_governor:CPU调频策略,可以修改;scaling_setspeed:设置CPU运行频率;
如下图:
sysfs回调下来后,会进入xxx_store/xxx_show函数来进行具体的设置,至于设置的流程大体与cpufreq_driver注册图中类似,不再深入分析了。
驱动的实现变成了实现struct cpufreq_driver函数指针中的函数,并注册即可。目前的驱动开发大抵如此,变成了一道填空题,当然我们也需要去了解背后的原理。
作者:LoyenWang
出处:https://www.cnblogs.com/LoyenWang/
公众号:LoyenWang
版权:本文版权归作者和博客园共有
转载:欢迎转载,但未经作者同意,必须保留此段声明;必须在文章中给出原文连接;否则必究法律责任
出处:https://www.cnblogs.com/LoyenWang/
公众号:LoyenWang
版权:本文版权归作者和博客园共有
转载:欢迎转载,但未经作者同意,必须保留此段声明;必须在文章中给出原文连接;否则必究法律责任

