网络流概述
uptada 2023/11/7:局部重构。
算法
基础概念:
- 网络 : 一张有向图,其中每个边都有一个边权,被称为容量
- 流:可以类比水流,从源点流出流入汇点
- 源点和汇点:所有流流出的节点(S)和所有流流入的节点(T)
- 对于一条边
注意这里 流量
容量
网络中的每一条边满足以下三条限制:
-
即经过一条边的流量不超过它的容量,即容量限制。
-
一条边的流量与其反向边的流量之和为0,即斜对称性。
-
一个点总流入的流量 = 总流出的流量,即流量守恒。
一般来说我们认为源点流出的流是无限的。
EK算法
前置概念
- 增广路:一条从源点到汇点的路径,其所有边的残余容量都非负
- 残余网络:在任意时刻,网络中的所有节点和残余容量大于零的边构成的子图
解决最大流问题的一个基本做法是不断寻找增广路,这里不加证明的给出结论
增广路算法总能找到一张网络的最大流。
朴素的 dfs 实现是 FF 算法,复杂度和容量相关,而基于 bfs 增广的 EK 算法有着更优秀的复杂度。
算法原理
EK 的思想是朴素的:首先,找到一条从源点到汇点流量为 0 的路径一定是可行的,之后再把这条路径上的流量加大到不能加为止就找到了一条增广路,只要不断地寻找增广路就能找到最大流。
如果你模拟一下这个过程就会发现,这样做正确性似乎有些问题,比如下面这张图
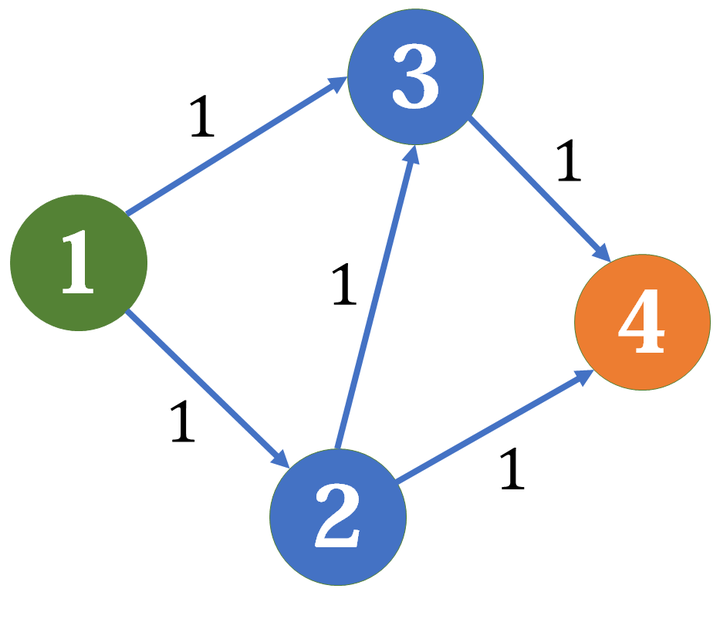
如果选择 1 -> 2 -> 3 -> 4 进行增广得到的最大流为 1
但是最大流显然是通过 (1 -> 3 -> 4) + (1 -> 2 -> 4) 得到的 2
为了解决这个问题,我们引入反向边的概念,给程序一个反悔的机会,具体来说,流经一条边和其反向边相当于并未流经这一条边。
反向边,顾名思义就是在每条正向边所连接的两个节点之间连一条相反的,边权为零的边,根据斜对称性,在每条边流过大小为 f 的流量时(表现在代码中就是边权减去 f),其反向边容量应该加上 f。
为了方便寻找反向边,我们采用成对变换的技巧,即把两点间的两条边存在 a 和 a+1 处,则 e[i] 和 e[i^1] 就表示两条边。
算法流程
- 找到一条增广路
- 找到这条增广路上的最小容量
- 增加最大流
- 重复第一步直到源点和汇点不连通
最后放上代码
点击查看代码
inline bool bfs( ){
memset( inq, 0, sizeof( inq ) );
while( !q.empty( ) ) q.pop( );
q.push( s ); inq[s] = 1;
while( !q.empty( ) ){
int x = q.front( ); q.pop( );
for( int i = head[x]; i; i = e[i].nxt ){
int y = e[i].v;
if( inq[y] or !e[i].w ) continue;
pre[y].v = x;
pre[y].e = i;
if( y == t ) return 1;
inq[y] = 1;
q.push( y );
}
}
return 0;
}
inline int EK( ){
int ans = 0;
while( bfs( ) ){
int mi = inf;
for( int i = t; i != s; i = pre[i].v )
mi = min( mi, e[pre[i].e].w );
for( int i = t; i != s; i = pre[i].v ){
int x = pre[i].e;
e[x].w -= mi;
e[x^1].w += mi;
}
ans += mi;
}
return ans;
}
EK算法时间复杂度上界是
dinic算法
在下面这张图中,EK算法暴露出一个致命的问题
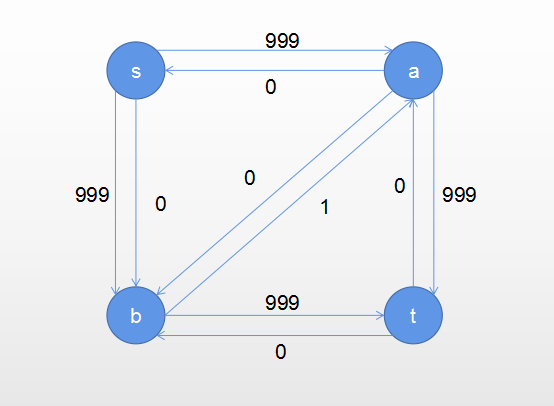
如果选择了 s->a->b->t 这条路径那么EK算法需要执行大量不必要的操作,运行时间直接爆炸,这是我们不能容忍的。
所以就需要请出 dinic 算法,一般来说在 oi 中大部分的网络流问题都是采用 dinic 解决的。国际法规定不能卡dinic。
算法原理
首先在残余网络上建立分层图(注意不是最短路的分层图),即对于一条边
算法流程
- 首先通过bfs对残余网络进行分层
- 然后寻找增广路并更新残余网络
- 最后累加最大流
放代码(无优化)
点击查看代码
bool bfs( ){
while( !q.empty( ) ) q.pop( );
for( int i = 1; i <= (n << 2); i++ ){
dis[i] = 0;
}
dis[s] = 1;
q.push( s );
while( !q.empty( ) ){
int x = q.front( ); q.pop( );
for( int i = head[x]; i; i = e[i].nxt ){
int y = e[i].v;
if( dis[y] or !e[i].w ) continue;
dis[y] = dis[x] + 1;
q.push( y );
}
}
if( dis[t] ) return 1;
return 0;
}
int dfs( int x, int low ){
int rlow = 0, used = 0;
if( x == t ){
ans += low;
return low;
}
for( int i = head[x]; i; i = e[i].nxt ){
int y = e[i].v;
if( dis[y] == dis[x] + 1 and e[i].w ){
rlow = dfs( y, min( low - used, e[i].w ) );
if( rlow ){
used += rlow;
e[i].w -= rlow;
e[i^1].w += rlow;
if( used == low ) break;
}
}
}
return used;
}
void dinic( ){
while( bfs( ) ){
dfs( s, inf );
}
}
这里直接在 dfs 中累加了最大流。
dinic 还有一个非常有用的优化,当前弧优化,通过它可以不访问那些不可能到达汇点的边,从而大大加快算法效率。
代码也很简单,只需要在代码里加上两行
for( int i = 1; i <= (n << 2); i++ ) cur[i] = head[i];
for( int &i = cur[x]; i; i = e[i].nxt )
完整代码如下
点击查看代码
bool bfs( ){
while( !q.empty( ) ) q.pop( );
for( int i = 1; i <= (n << 2); i++ ){
cur[i] = head[i];
dis[i] = 0;
}
dis[s] = 1;
q.push( s );
while( !q.empty( ) ){
int x = q.front( ); q.pop( );
for( int i = head[x]; i; i = e[i].nxt ){
int y = e[i].v;
if( dis[y] or !e[i].w ) continue;
dis[y] = dis[x] + 1;
q.push( y );
}
}
if( dis[t] ) return 1;
return 0;
}
int dfs( int x, int low ){
int rlow = 0, used = 0;
if( x == t ){
ans += low;
return low;
}
for( int &i = cur[x]; i; i = e[i].nxt ){
int y = e[i].v;
if( dis[y] == dis[x] + 1 and e[i].w ){
rlow = dfs( y, min( low - used, e[i].w ) );
if( rlow ){
used += rlow;
e[i].w -= rlow;
e[i^1].w += rlow;
if( used == low ) break;
}
}
}
return used;
}
void dinic( ){
while( bfs( ) ){
dfs( s, inf );
}
}
}
dinic算法时间复杂度是
费用流
现在给每个边加上一维费用表示每单位的流量会产生这么多的代价,要求求出最小费用/最大费用最大流。
只需要把最大流中的 bfs 换成 spfa 即可。
点击查看代码
namespace mcmf{
const int N = 2e4 + 10;
struct edge{
int u, v, f, w, nxt;
} e[N];
int head[N], cnt = 1;
int s, t, cst, fl;
int flow[N], pre[N], dis[N], inq[N], prew[N];
void add(int u, int v, int f, int w){
e[++cnt] = (edge){u, v, f, w, head[u]};
head[u] = cnt;
e[++cnt] = (edge){v, u, 0, -w, head[v]};
head[v] = cnt;
}
queue<int> q;
bool spfa( ){
memset(dis, 0x3f, sizeof(dis));
flow[s] = inf; dis[s] = 0; pre[t] = -1;
q.push(s); inq[s] = 1;
while(!q.empty( )){
int x = q.front( ); q.pop( ); inq[x] = 0;
for(int i = head[x]; i; i = e[i].nxt){
int y = e[i].v;
if(dis[x] + e[i].w < dis[y] and e[i].f){
dis[y] = dis[x] + e[i].w;
pre[y] = x; prew[y] = i;
flow[y] = min(flow[x], e[i].f);
if(!inq[y]) q.push(y), inq[y] = 1;
}
}
}
return pre[t] != -1;
}
int EK( ){
cst = fl = 0;
while(spfa( )){
int now = t;
fl += flow[now];
cst += dis[now] * flow[now];
while(now != s){
e[prew[now]].f -= flow[t];
e[prew[now] ^ 1].f += flow[t];
now = pre[now];
}
}
return cst;
}
};
最小割
求选出一个边集使得源汇不连通的总权值和最小的边集,有一个非常重要的定理是最大流等于最小割。
证明很简单,如果你会线性规划的话你会发现最大流和最小割实际上是对偶问题,从残量网络上来理解的话,最终的残量网络上源汇是不连通的,而这时候求出的最大流就刚好对应使得源汇不连通的边权和。
建模
网络流的题目大多都是考察建模能力的,上面的算法熟练掌握板子就差不多了。
problem1 【练手题】
对每个人和座位分别建点,源点连向每个人,每个人连向他们想要的座位,每个座位连向汇点,边权为2,因为每个座位上可以坐两个人。

problem2【三分图匹配】
考虑限制,每个人可以选择 文/理,可以考虑用二分图,选特定集合的人有额外收益,考虑新建一个节点表示选择这个节点相连的所有节点。
最终建图:每个点拆成两个表示文理,源点向文连边,汇点向理连边,容量为选文/理的价值,文理之间连inf,源点连向虚拟节点连边,容量为same,虚拟节点向对应的相邻节点连边,容量为 inf,汇点同理。
这样割断了源点和对应节点的边代表放弃了选文的收益,如果要获得相邻的人全选文的收益就要割掉所有选理的边,也可以直接放弃这个收益。

problem3【最小边数最小割】
题意是求边数最小的最小割,二维费用首先想到费用流,但是很遗憾这题需要求最小割。观察一下代价的性质,最小割边数不超过 n,由此引发出一个清奇的思路,把原来每条边的容量设成
problem4【优化建图】
考虑把点按 popcount 奇偶性分类,按题中规则连边,点数
problem5【集合划分模型】
一种非常重要的最小割模型,考虑一个集合里的作物的共同代价要么不选,要么就得全放到一个集合里,等价于全不能放在另一个集合里,非常符合最小割的定义。建图:每个点向源汇点分别连容量为放入A/B代价的边,建新点连向源点容量全为放入A的代价,连向在此集合中的点,容量为 inf。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 单线程的Redis速度为什么快?
· 展开说说关于C#中ORM框架的用法!
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· Pantheons:用 TypeScript 打造主流大模型对话的一站式集成库
· SQL Server 2025 AI相关能力初探