论文阅读2020:Firefly: 多用户VR预渲染框架
Firefly: Untethered Multi-user VR for Commodity Mobile Devices
这篇发在系统领域USENIX ATC 2020的文章,通过预渲染和存储用户在空间里所有可能位置、所有可能角度上看到的图像,交互时根据VR设备实时的位姿将对应帧传输到VR客户端,最终可支持15个VR客户端以60FPS速度并发。不得不感叹,跨领域的文章,真的视角很独特,VR的渲染一直都是根据实时位姿实时刷新,从未想过可以事先存下来。
概念科普
在介绍这篇文章之前,介绍一些基本概念,为了将本文的方法和其他方法区分。
普通视频
我们日常看的电影电视,显示在二维屏幕上。拍摄的时候什么视角,播放就什么视角,无法控制视角。
立体视频Stereoscopic
一般所说的3D视频。一般包含红蓝3D或者偏振3D.电影院的3D电影主要是偏振3D,针对人的左右两眼送出略微不同的视频,制造视差,带来一些立体感。目前常规视频格式mp4等以普遍之前上下排列和左右排列的3D视频。
立体视频仍然无法控制视角。

360度全景视频
基本的VR视频,三个自由度3DOF旋转(yaw, pitch, roll),即人的位置不动,头可以360度旋转,无法走近或走远看。
Volumetric视频 (和这篇Paper没啥关系)
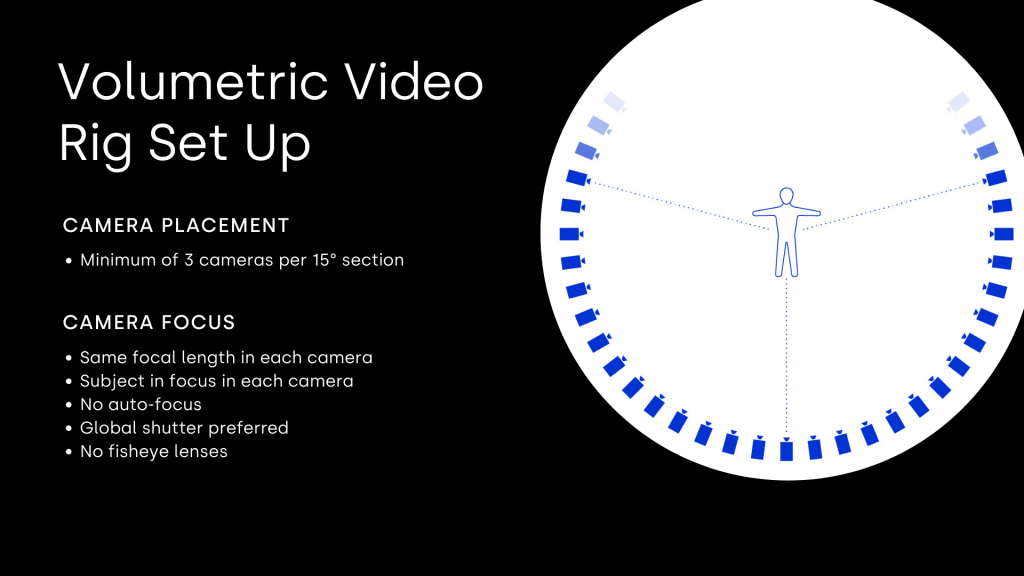
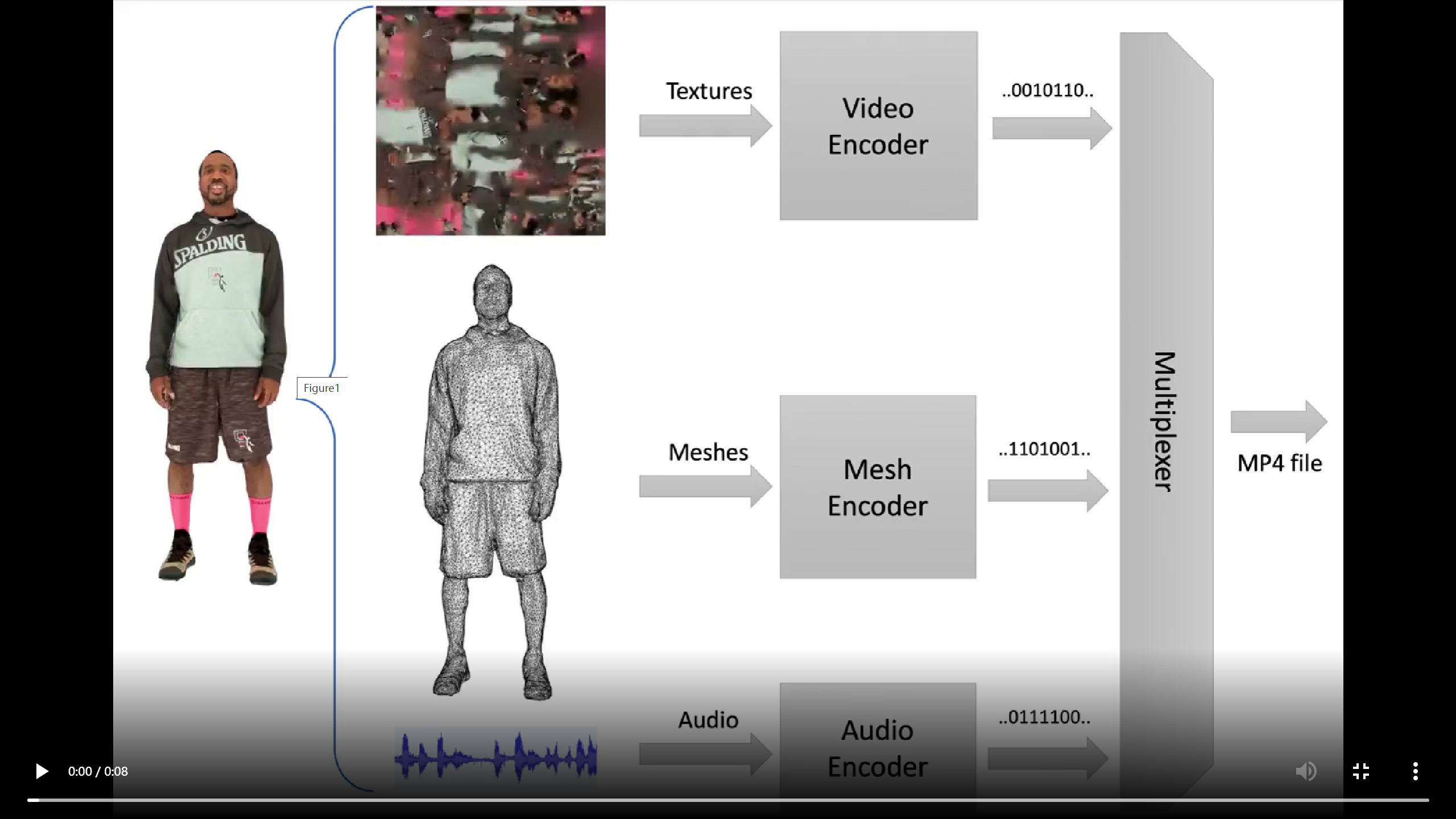
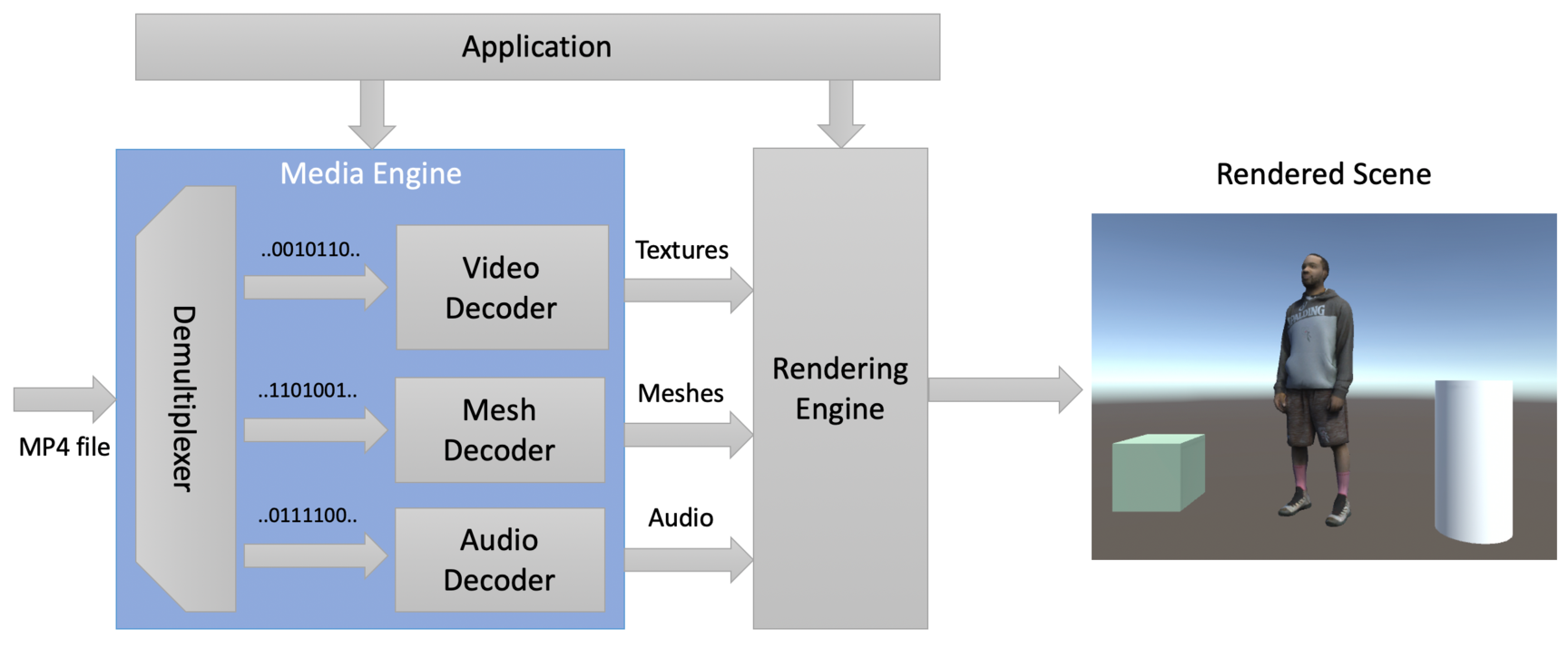
在360度全景视频基础上再增加三个自由度,6DOF,除了旋转外,还增加了位移动向量,可以走近走远。生产Volumetric视频 一般包含了基于网格和基于点云的两大类方法。下面三幅图分别给出了获取Volumetric视频的相机摆放、文件存储以及实时播放的过程。
主体流程
区分前景和背景
区分背景和前景,前景指的是其他VR用户的Avarar或者实时变化的Control Panel。背景指的是比较固定不变,但非常复杂的场景。
预渲染
对于背景,进行预渲染。对VR活动的空间范围进行离散化,生成一个个grid。对每一个grid上,均多次渲染拼接,以及压缩成一个360度视频。

实验中,数据大小如下:
• Map size: 30 X 30 m
• Grid size: 5cm
• Size: 137GB vs. 99GB
一个场景上百GB,这个数据量还是相当大的,而且这样存储其实空间上也有很多冗余,作者以一句现代存储便宜不是什么问题带过。。。感觉还是有一些优化空间的。
存储
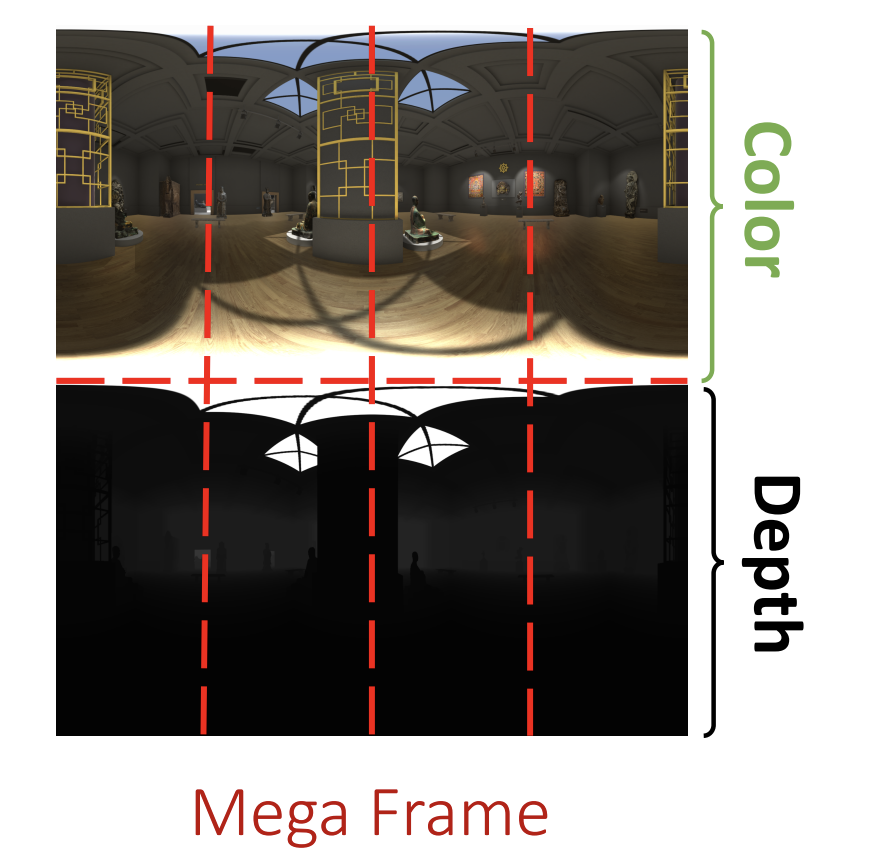
对于grid上每一个位置(5cm间隔),都存储一个360视频的帧,文章里定义为Mega Frame,Mega Frame包含相匹配的颜色和深度buffer,存储深度为了和前景有正确的深度关系。为了访存时的效率,对于360度视频的某一帧,又做了分块处理,分成四列的原因主要是25个测试者VR交互时基本都是水平移动,很少上下打量,因此切成列效率更高。Mega
Frame又做了LOD,为后面AQC(Adaptive Quality Control)提供可能。这些Mega Frame按照位置和Tile ID存入数据库。
VR移动预测和Frame访存
VR Client根据用户实时的位姿,访存对应质量的Mega Frame,解压缩和进行图像显示。
作为系统类的文章,这里写了很多移动预测和AQC。我没有细看,大致是通过机器学习的方法预测下一步VR位姿,提前加载到VR端的存储里,VR的存储分为硬盘-内存-显存三级,分别存储未解压的Tile文件,未解压的Tile文件,解压的Tile文件。
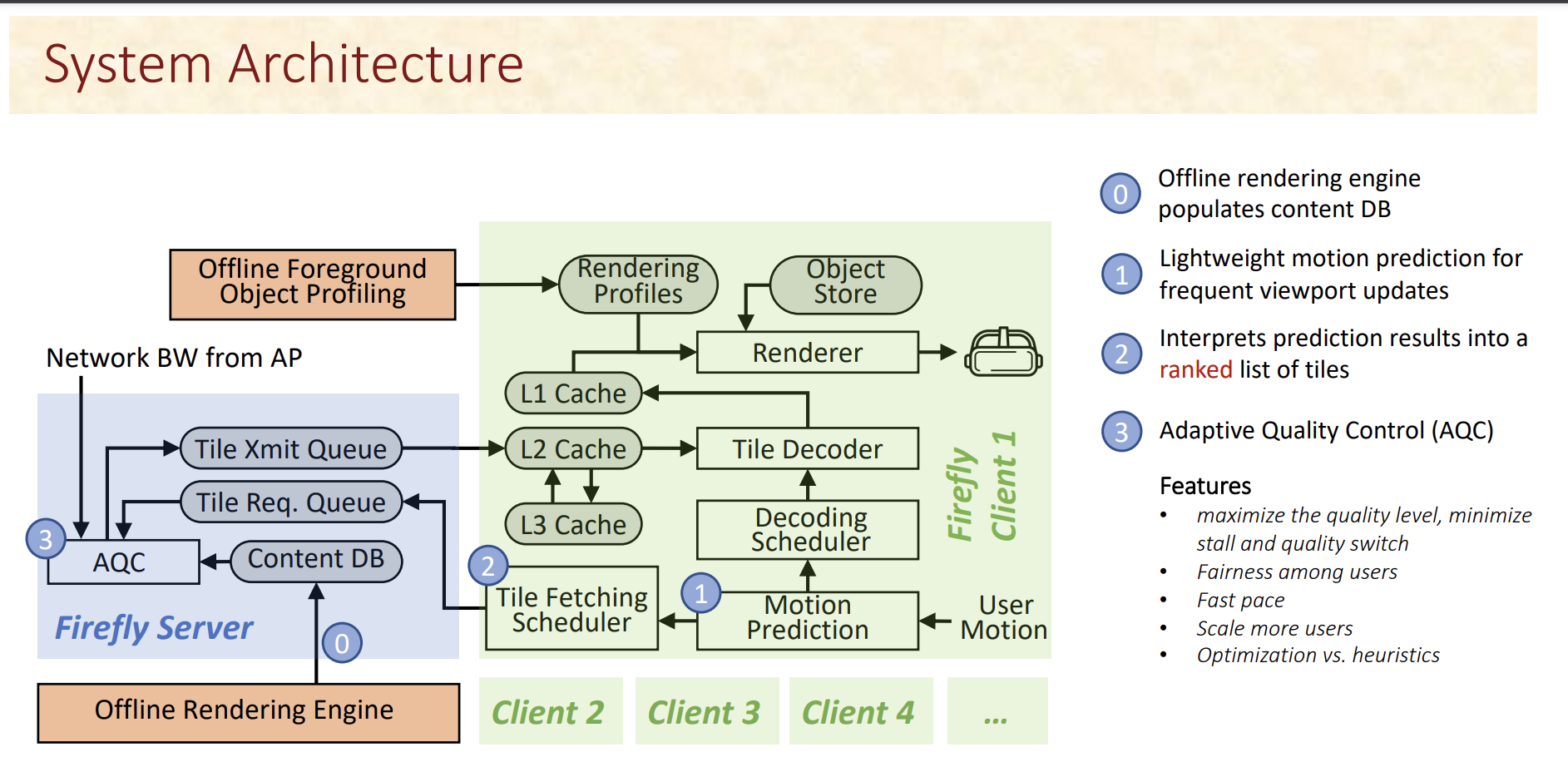
系统架构
整体系统架构如下图。值得说明的是这里的L1~L3 Cache不是真正的Cache,L3 Cache是VR client的硬盘,L2是VR Client的内存,L1是VR Client的显存Frame Buffer。
实验
硬件
VR Client是简易的手机配Cardboard的形式,手机是几款三星从2017到2019发布的Android 9手机。Server是一个桌面PC,配置如下:octa-core CPU @ 3.6GHz, 16 GB memory, 1TB disk, and Ubuntu 16.04,server无需渲染,只需要存储预渲染的结果,因此都不需要有GPU.

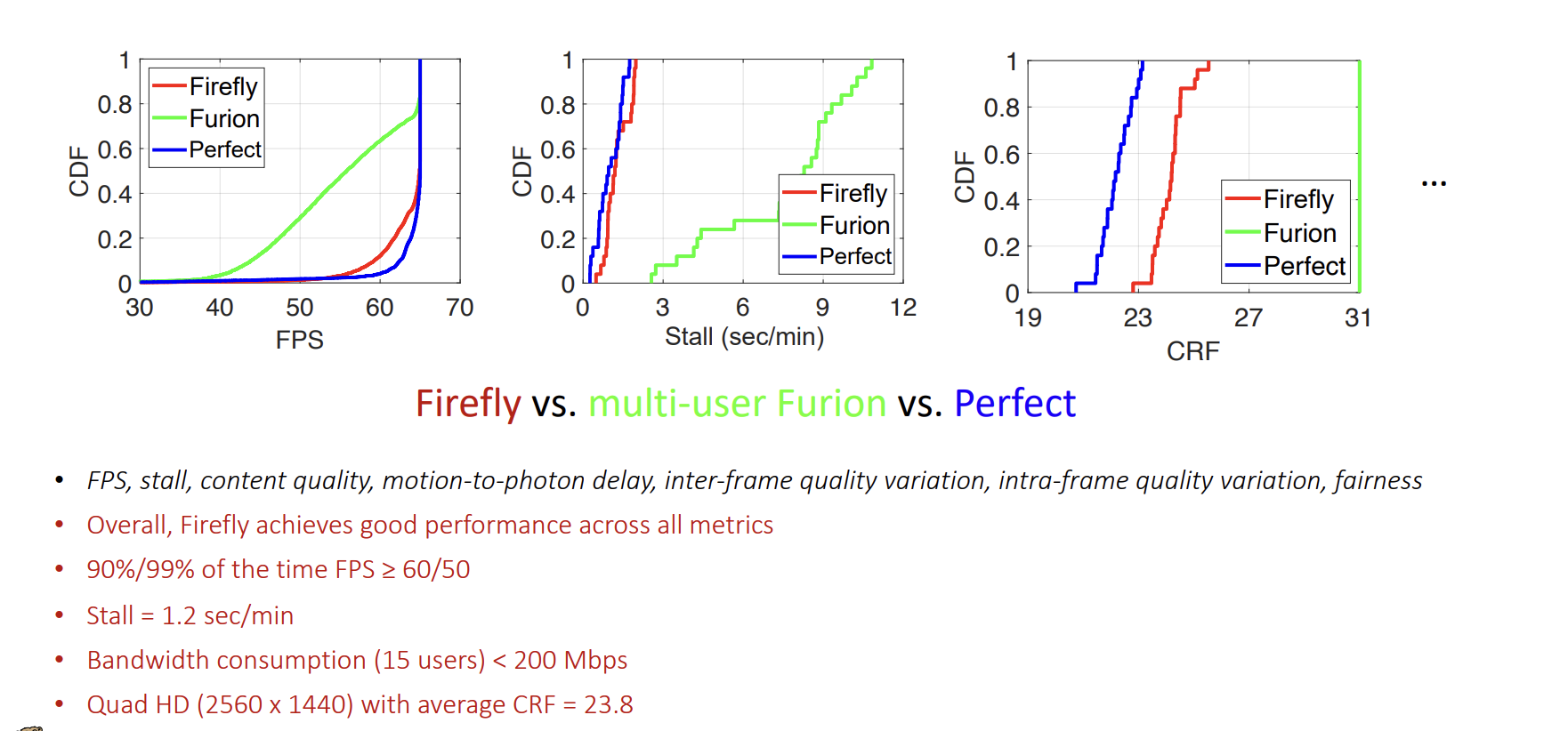
性能
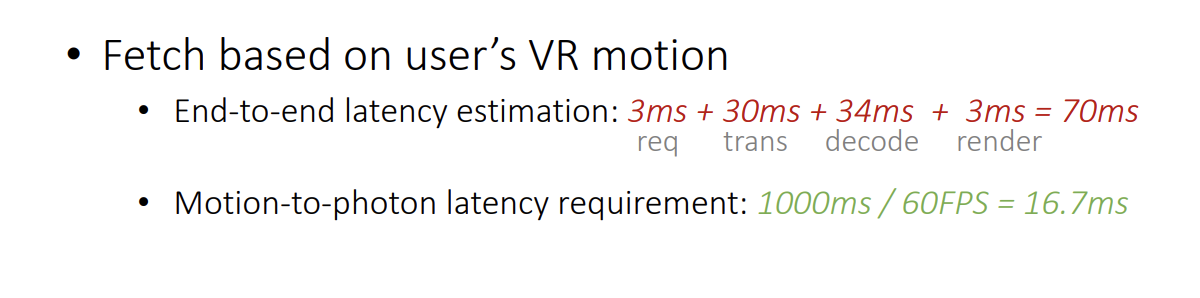
延迟
总结
这篇文章默认背景是固定的,不能有动态变化,例如动态灯光等等,这里有比较大的局限性,同时一个场景的存储百G级别也是比较大的。感觉对于多人体验的展会场景(场景单一,多人操作系统对硬件维护成本小),以及建筑、风光TOUR这类的情况,有一定的适用性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号