我这里用的Solidworks版本是2015的版本,导出操作跟之前的版本不一样,比如说官方网站上的文档就太适用。
首先,安装solidworks软件,具体的安装方法自行百度,安装完软件之后,就可以安装SW2URDF插件了,插件的下载地址为:http://wiki.ros.org/sw_urdf_exporter
下载完成后,双击默认安装即可;
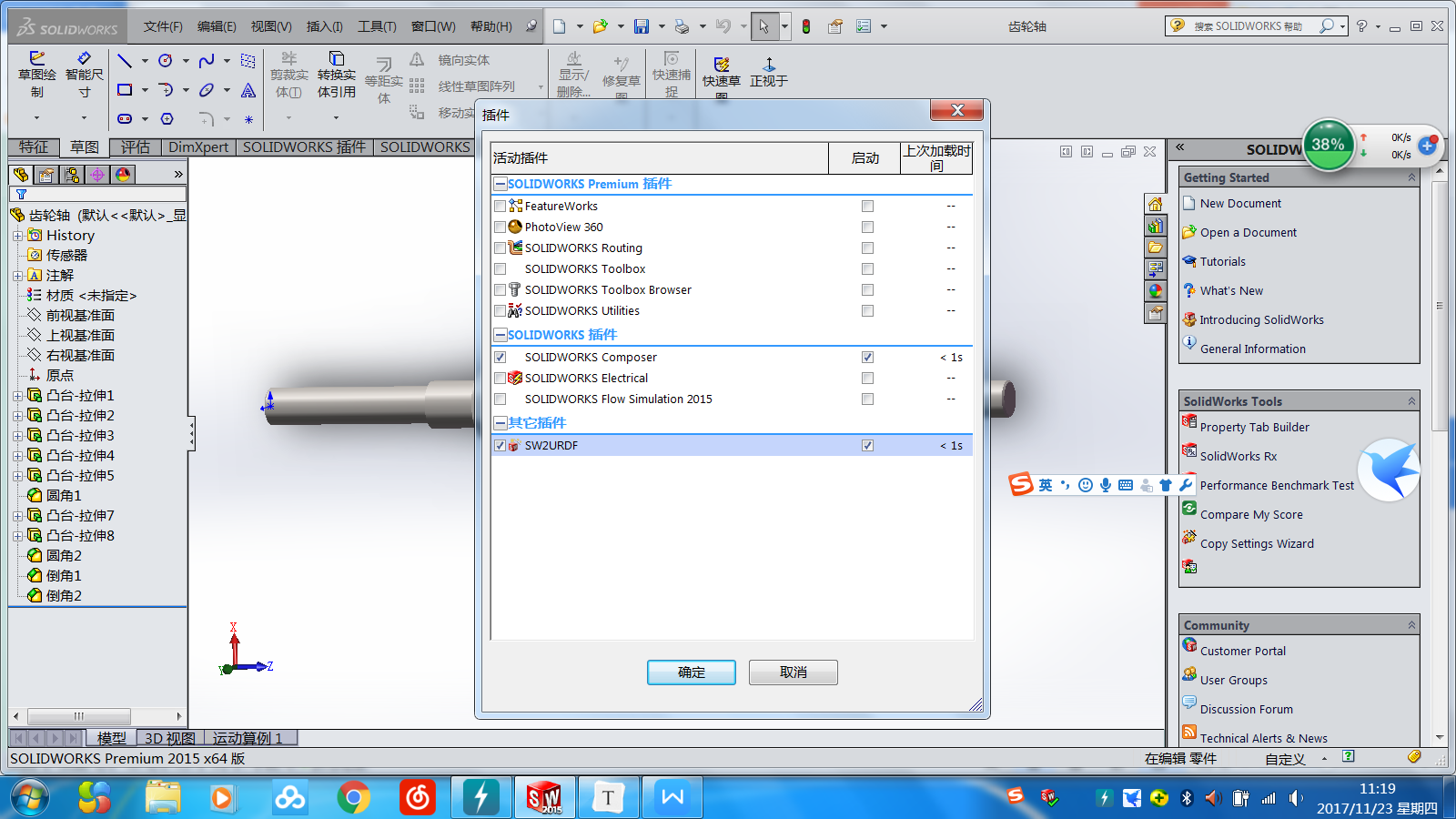
安装好之后,可以通过如下截图的操作查看插件:
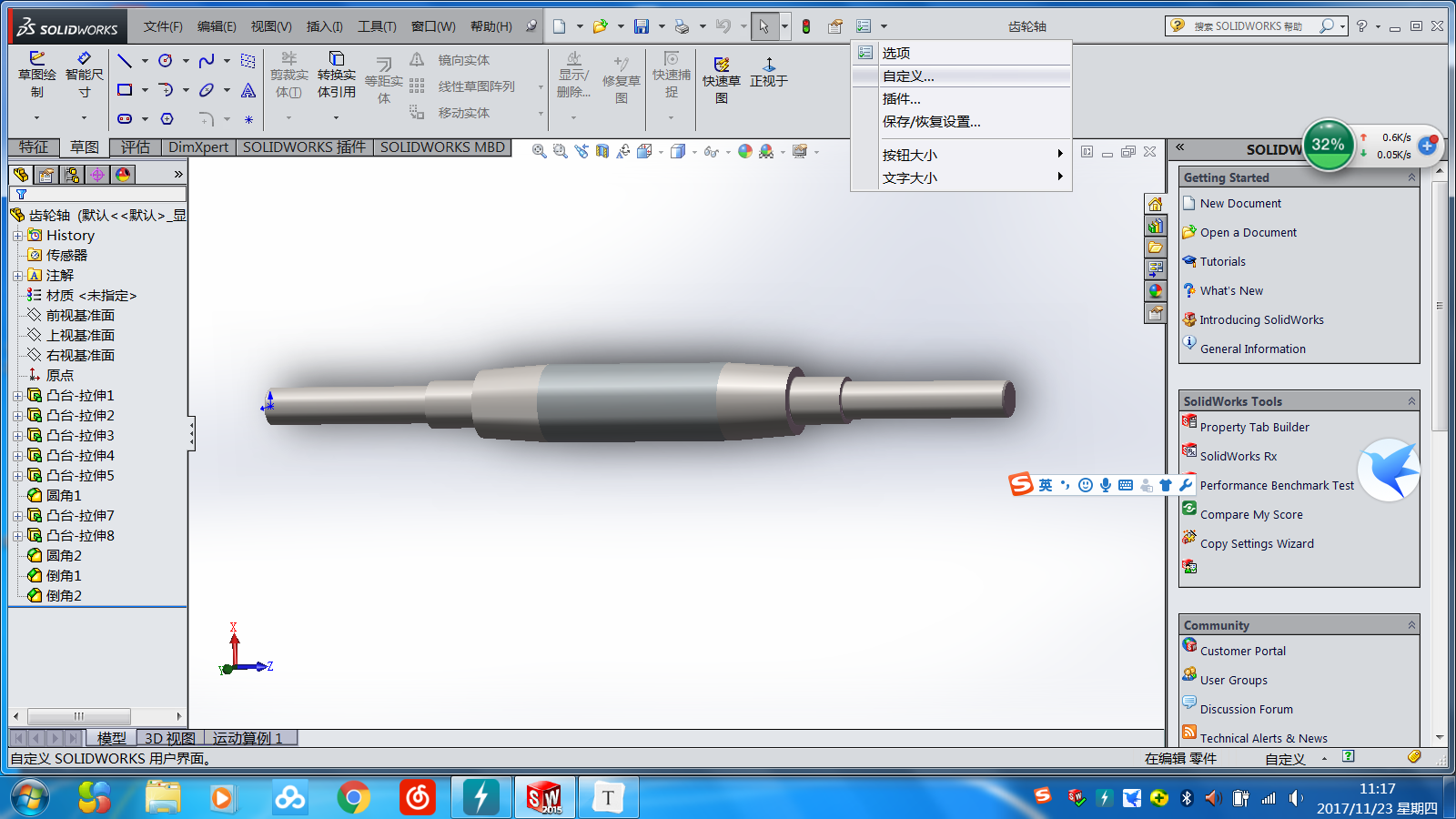
然后,打开需要导出的机器人模型,这里我随便打开一个零件;
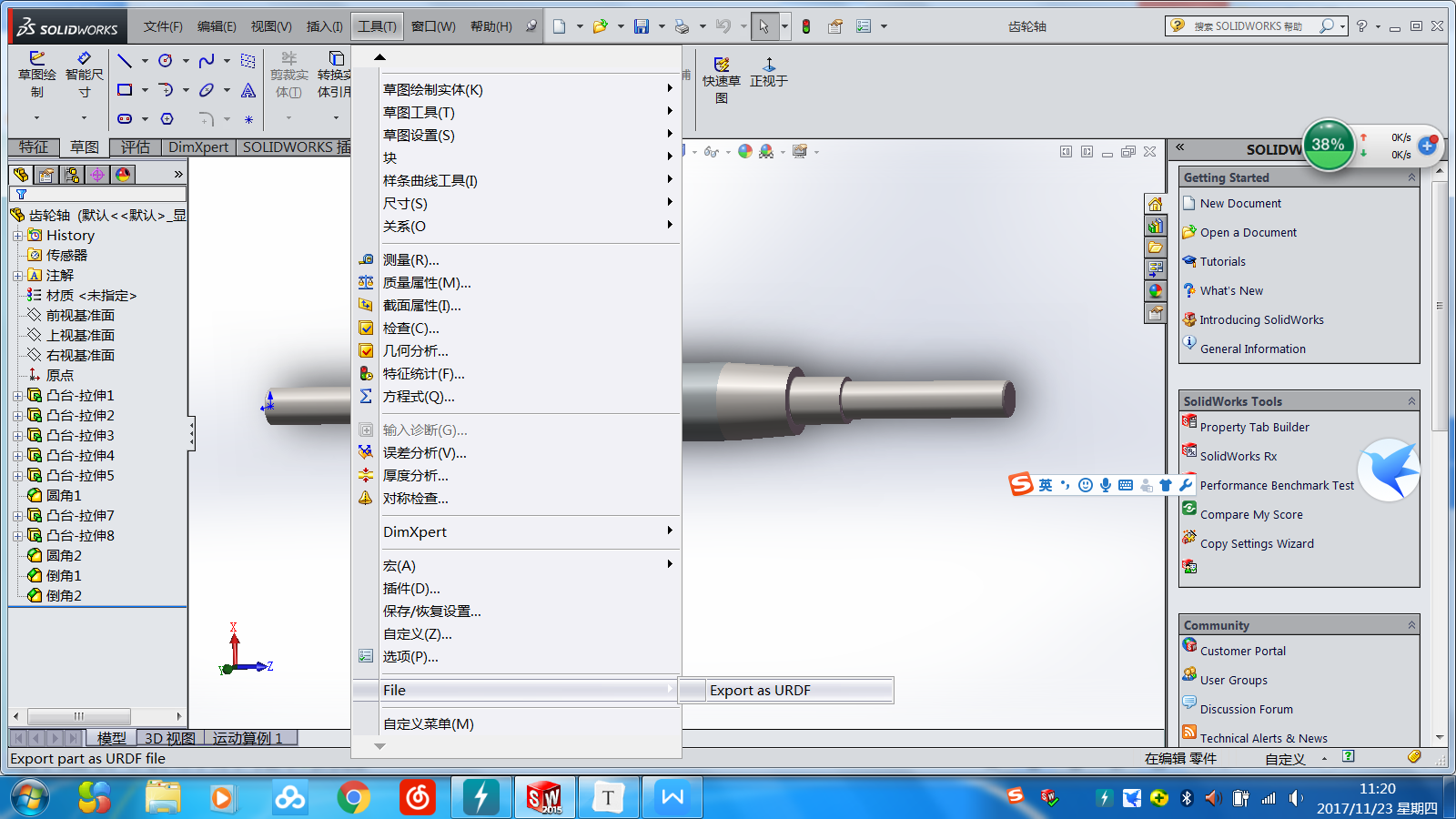
接着,通过“工具”——“File”——“Export as URDF”打开导出对话框;
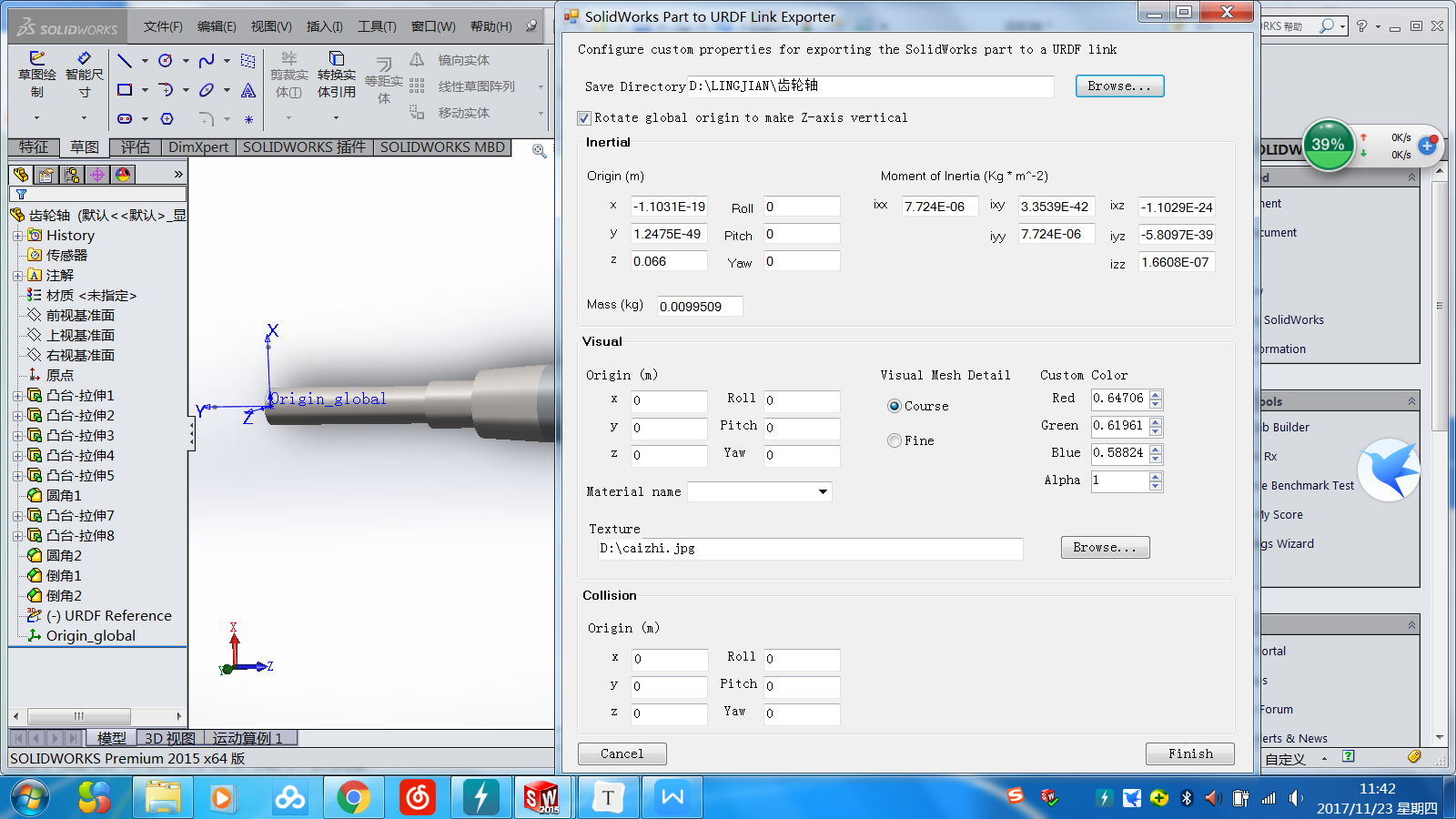
最后,在弹出的窗口中选择导出文件的存储路径和模型文件的材质贴图,如下图所示:
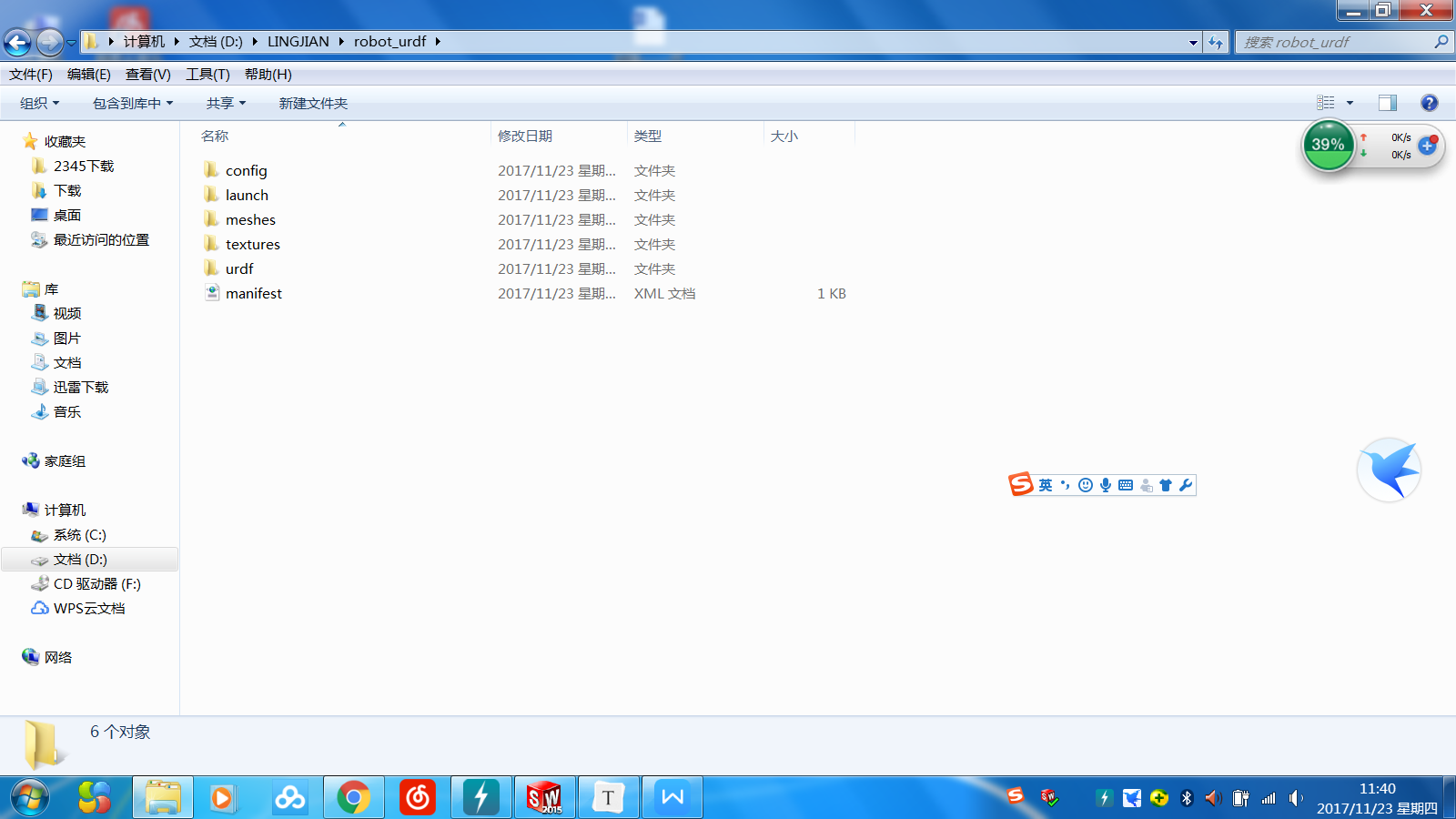
最终导出的模型文件如截图所示: