线性方程组求解的投影方法介绍 - Projection Method
趁着还没忘,赶紧记录一下我对projection method的理解
考虑线性方程组
这里 \(A \in \mathbb{R}^{n \times n}\),\(x\) 为变量,\(b\) 为右端项(right hand side, RHS)。投影法的概念是从 \(\mathbb{R}^n\) 的(搜索)子空间\(\mathcal{K}\) (subspace of candidate approximate)中得到近似解,若该子空间的维度为\(m\),那么还得补充 \(m\) 个约束(可以想想约束的作用)。约束一般定义为与残差向量 \(b-Ax\) 正交的\(m\)个线性独立的向量。这些约束向量构成了维度为\(m\)的约束空间 \(\mathcal{L}\) (subspace of constraints)。
投影法分为正交(orthogonal)投影和斜(oblique)投影,区别在于解子空间 \(\mathcal{K}\) 和残差子空间 \(\mathcal{L}\) 的选取,正交投影: \(\mathcal{K}=\mathcal{L}\),斜投影中 \(\mathcal{K}\) 不等于 \(\mathcal{L}\),甚至毫无关系。
投影法的计算策略:
一般迭代求解的启动需要初始值\(x_0\),此时近似解在仿射空间\(x_0+\mathcal{K}\)中寻找,即:
假设近似解为 \(\hat{x} = x_0 + \delta\),初始残差向量为:
因此
换而言之
上述的正交条件用图解释为:
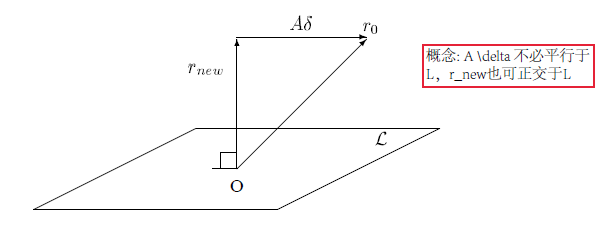
我的理解:对于定义的空间 \(\mathcal{K}\) 和 \(\mathcal{L}\),以及初始值 \(x_0\),初始值产生的残差向量为 \(b-Ax_0\),现在需要想办法将残差向量的长度(2-范数)降低到一定程度。在原解空间中搜索近似解过于复杂,转而在子空间 \(\mathcal{K}\) 得到校正值 \(\delta\),使得 \(\hat{x} = x_0 + \delta\) 产生的残差向量在空间 \(\mathcal{L}\) 上的投影长度为0,也相当于残差空间的某 \(m\) 个独立方向上的残差分量降为0。然后更新子空间 \(\mathcal{K}\) 和 \(\mathcal{L}\),消除另外 \(m\) 个方向上的残差,到达一定水平后结束搜索,最终近似解为:\(\widetilde{x} = x_0 + \delta_1 + \delta_2 + ... + \delta_n \ (\delta_i \in \mathcal{L}_i)\)
另,对于斜投影有结论:一次投影步骤完成后,残差向量的2-norm不会超出初始残差向量的2-norm,即
而正交投影的收敛性结论就不一样

最后更新于 2022年2月13日 --- 最初发表于 2022年2月13日
原创作者:LitBro
关于作者:天!2022年了!
本文链接: [https://www.cnblogs.com/LitBro/p/15890829.html]
版权声明:本文采用 BY-NC-SA协议,转载或引用请注明出处!
关于后续:碍于学业不精,如有描述不当,还请见谅并非常感谢指出

 浙公网安备 33010602011771号
浙公网安备 33010602011771号