有限元中等效结点力的一点理解
前段时间想给算例加一种边界条件,想着想着,发现写的有限元程序适配度不够高,得小小改动一下。
改着改着又发现关于等效结点力我好像一直没理解透,只知道有这个东西,但是不清楚具体来历,还是老老实实整理一下吧。
首先让我们请出有限元 [👏],考虑弹性力学平面问题的有限元推导,用的最小势(位)能原理,得到势能泛函:
其中,\([\epsilon]\) 为应变,\([D]\) 为弹性矩阵,\(t\) 为二维体厚度, \([u]\) 为位移,\([f]\) 为体积力,\([T]\) 为面力。对于有限元离散模型,系统的势能是各个单元势能之和,因此得到:
其中,\([a^e]\) 为单元结点位移向量 , \([B]\) 为单元应变矩阵,\([N]\) 为单元形函数列阵。这两公式摆出来有点劝退,😱,顶住。
我们暂时先忽略体积力哈,单元等效结点载荷列阵就藏在上边,我们把它揪出来:
为什么是说是等效呢?因为 \([a^e]^T[P^e]\) 的物理意义就是 【等效的】外载荷 \([T]\) 在边界位移 \([u]\) 下的势能。
【力*位移】得到的是关于能量的一个值嘛,前面也说了,\([a^e]\) 是结点位移,\([P^e]\) 是定义的等效结点力,作用在结点上(这里只是假设的,其实并没有一个这样的力存在)。
这样原本一个面上的面力(外载荷)在这个面的位移下的势能,写成了,面上每个结点的位移乘上对应的等效结点力,这便是等效结点力的物理意义了。
现在来到实操部分,理论有了,实际程序该怎么算呢?
书上有个关于三角形单元,一边均布面力的等效结点力计算,截图如下:

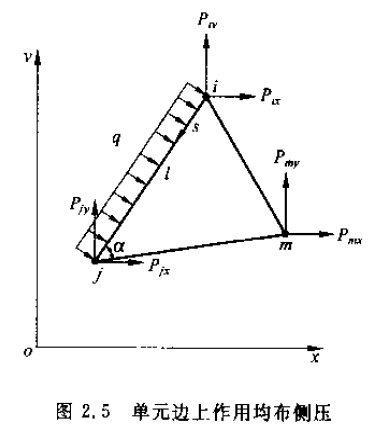
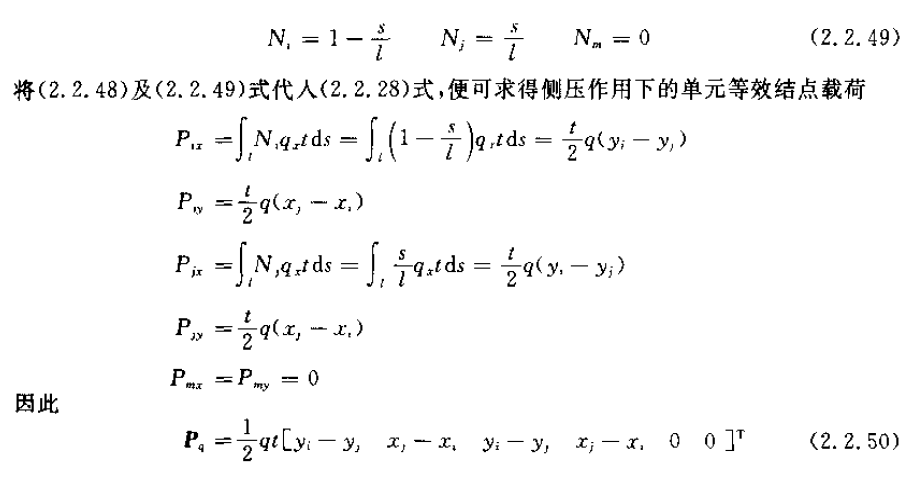
我们发现,原本好端端的形函数 \([N]\),这里怎么变身了呢?冷静,肯定有猫腻!
如 2.2.49 式,形函数已经转换到了局部坐标系,关于面力施加的那个面的一个坐标系,再仔细打量打量,咦,这不和两点线性插值公式一样嘛!
由以前所学的知识,我们知道,三角形单元是个常应变单元,位移模式是线性的,这里就把这个线性的概念用上,狠狠发挥了一波。
因此,在那条载荷边上,结点 \(i,j\) 位移已知的话,这边上的 x 方向位移就会是这样变化的:
好了,现在,这一切都可以解释通了。换一种思路,三角形单元 x 位移场写成如下:
当 \((x,y) \in \Gamma\) 时,
嗯,就是这样了,对于四边形单元,求等效结点力的时候考虑积分区间,结果很容易就计算出来了。
从这抄的
[1] 王勖成. 有限单元法, 清华大学出版社, 北京, 2003.

最后更新于 2021年1月25日 --- 最初发表于 2021年1月25日
原创作者:LitBro
关于作者:咕咕咕
本文链接: [https://www.cnblogs.com/LitBro/p/14326008.html]
版权声明:本文采用 BY-NC-SA协议,转载或引用请注明出处!
关于后续:碍于学业不精,如有描述不当,还请见谅并非常感谢指出

 浙公网安备 33010602011771号
浙公网安备 33010602011771号