python opencv3 矩形 圆形边框
git:https://github.com/linyi0604/Computer-Vision
# coding:utf8
import cv2
import numpy as np
# 读入图像
img = cv2.imread("../data/mm1.jpg", cv2.IMREAD_UNCHANGED)
# 转化为分别率更低的图像
img = cv2.pyrDown(img)
# 二值化, 黑白二值化
ret, thresh = cv2.threshold(
cv2.cvtColor(img.copy(), cv2.COLOR_BGR2GRAY), # 转换为灰度图像,
127, 255, # 大于127的改为255 否则改为0
cv2.THRESH_BINARY) # 黑白二值化
"""
ret, dst = cv2.threshold(src, thresh, value, type)
参数:
src: 原图像
thresh: 阈值
value: 新值 大于或小于阈值的值将赋新值
type: 方法类型,有如下取值:
cv2.THRESH_BINARY 黑白二值
cv2.THRESH_BINARY_INV 黑白二值翻转
cv2.THRESH_TRUNC 得到多像素值
cv2.THRESH_TOZERO
cv2.THRESH_TOZERO_INV
返回值:
ret: 得到的阈值值
dst: 阈值化后的图像
"""
# 搜索轮廓
image, contours, hierarchy = cv2.findContours(
thresh,
cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
"""
cv.findContours()
参数:
1 要寻找轮廓的图像 只能传入二值图像,不是灰度图像
2 轮廓的检索模式,有四种:
cv2.RETR_EXTERNAL表示只检测外轮廓
cv2.RETR_LIST检测的轮廓不建立等级关系
cv2.RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,
里面的一层为内孔的边界信息。
如果内孔内还有一个连通物体,这个物体的边界也在顶层
cv2.RETR_TREE建立一个等级树结构的轮廓
3 轮廓的近似办法
cv2.CHAIN_APPROX_NONE存储所有的轮廓点,
相邻的两个点的像素位置差不超过1,
即max(abs(x1-x2),abs(y2-y1))==1
cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,
只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
返回值:
contours:一个列表,每一项都是一个轮廓, 不会存储轮廓所有的点,只存储能描述轮廓的点
hierarchy:一个ndarray, 元素数量和轮廓数量一样,
每个轮廓contours[i]对应4个hierarchy元素hierarchy[i][0] ~hierarchy[i][3],
分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,则该值为负数
"""
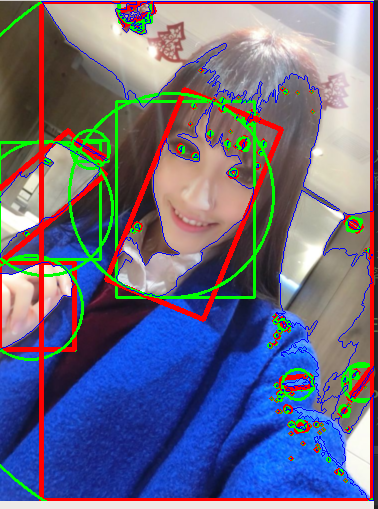
for c in contours:
x, y, w, h = cv2.boundingRect(c)
"""
传入一个轮廓图像,返回 x y 是左上角的点, w和h是矩形边框的宽度和高度
"""
cv2.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 2)
"""
画出矩形
img 是要画出轮廓的原图
(x, y) 是左上角点的坐标
(x+w, y+h) 是右下角的坐标
0,255,0)是画线对应的rgb颜色
2 是画出线的宽度
"""
# 获得最小的矩形轮廓 可能带旋转角度
rect = cv2.minAreaRect(c)
# 计算最小区域的坐标
box = cv2.boxPoints(rect)
# 坐标规范化为整数
box = np.int0(box)
# 画出轮廓
cv2.drawContours(img, [box], 0, (0, 0, 255), 3)
# 计算最小封闭圆形的中心和半径
(x, y), radius = cv2.minEnclosingCircle(c)
# 转换成整数
center = (int(x), int(y))
radius = int(radius)
# 画出圆形
img = cv2.circle(img, center, radius, (0, 255, 0), 2)
# 画出轮廓
cv2.drawContours(img, contours, -1, (255, 0, 0), 1)
cv2.imshow("contours", img)
cv2.waitKey()
cv2.destroyAllWindows()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号