
STM32 I2C通信实现SHT20温湿度采样并在OLED显示屏显示
一、开发板实例:STM32L431RCT6
开发板采用意法半导体(ST)公司的低功耗 Arm® Cortex®-M4 处理器STM32L431RCT6,其工作主频高达80MHz,并提供256KB Flash, 64KB SRAM存储空间。
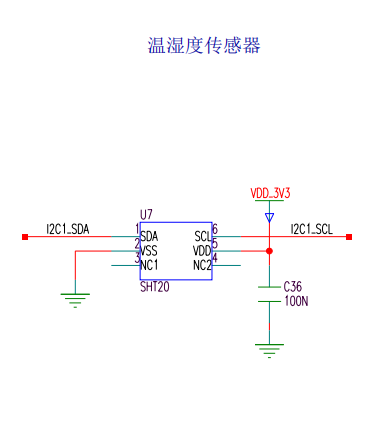
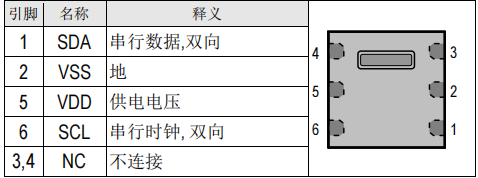
二、SHT20原理
技术参数:
- 工作电压:2.1~3.6VDC(请勿使用5V供电!)
- 信号输出:I2C数字输出
- 温度测量范围:-40~125°C 温度测量精度±0.3 °C
- 湿度测量范围:0~100%RH 湿度测量精度±3%
- 能耗:3.2uW(8位测量,1次/秒)
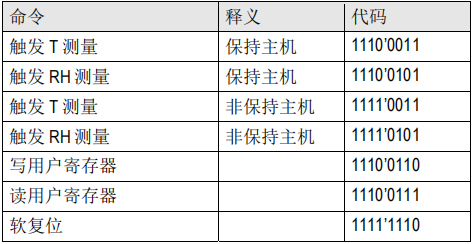
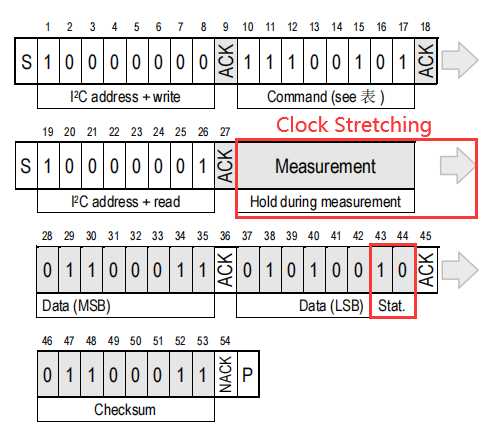
SHT20在采样时有两种工作模式:hold master模式和no hold master模式,具体采用哪种模式由命令决定。
其中,hold master模式(温度命令为0xE3,湿度命令为0xE5)将会使用Clock Stretching机制来与MCU通信,工作时序如下:
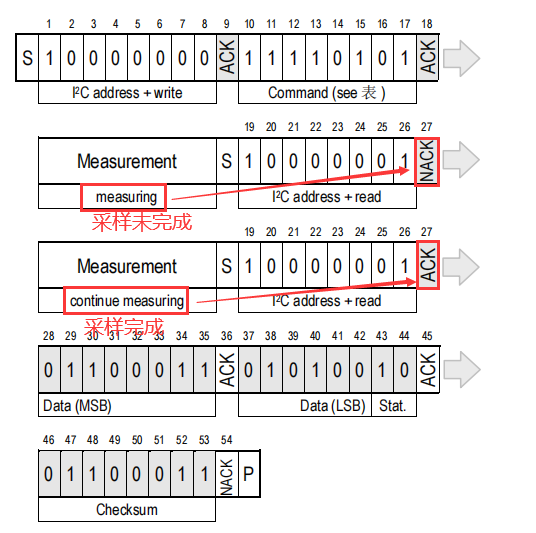
而no hold master模式(温度命令为0xF3,湿度命令为0xF5),工作时序如下:
三、采样
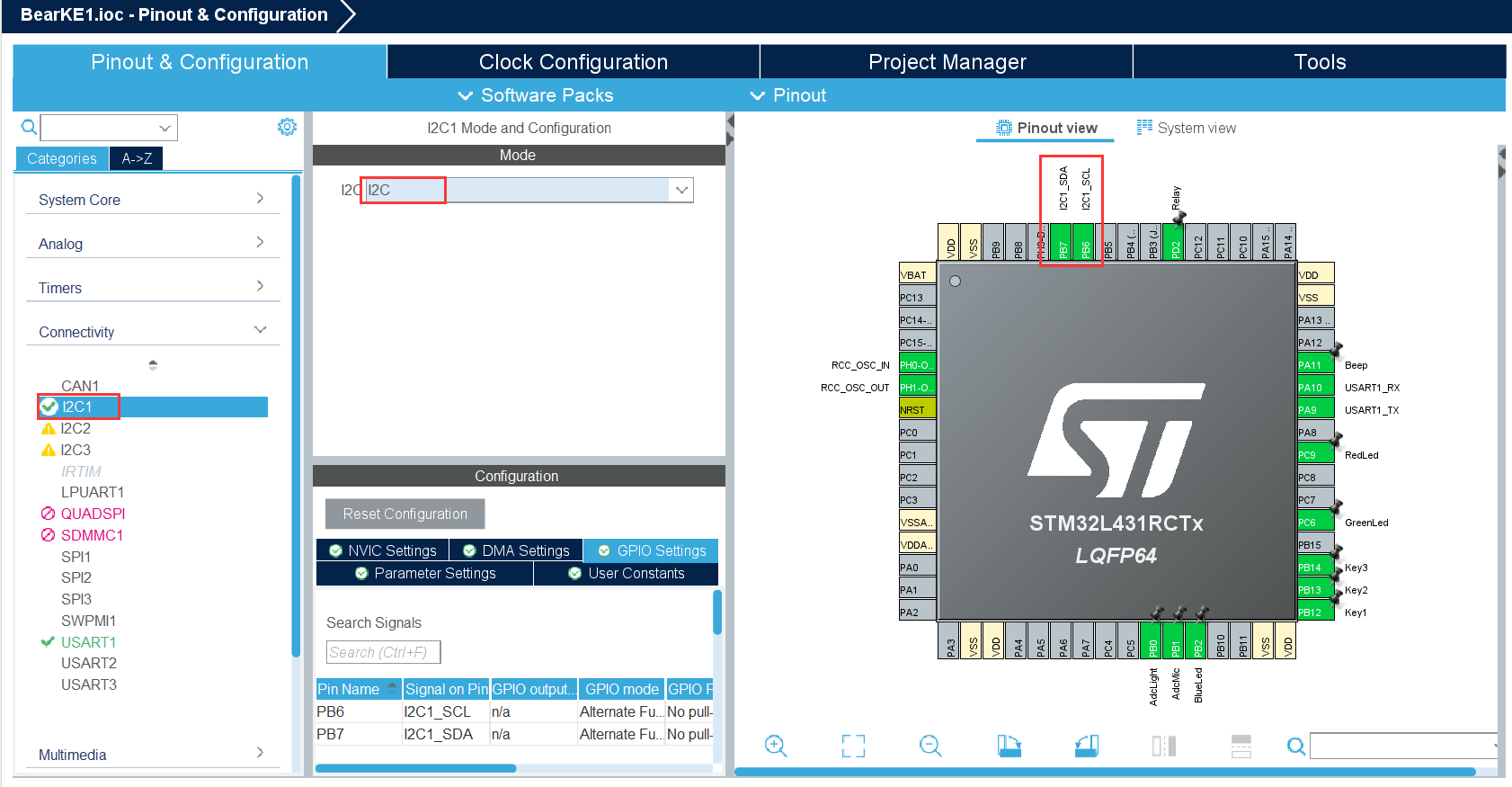
1、基于HAL库实现I2C采样
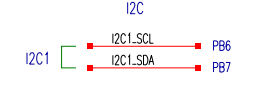
首先配置SHT20连接的PB6和PB7为I2C模式,Ctrl+S保存代码,会自动生成I2C总线初始化代码。
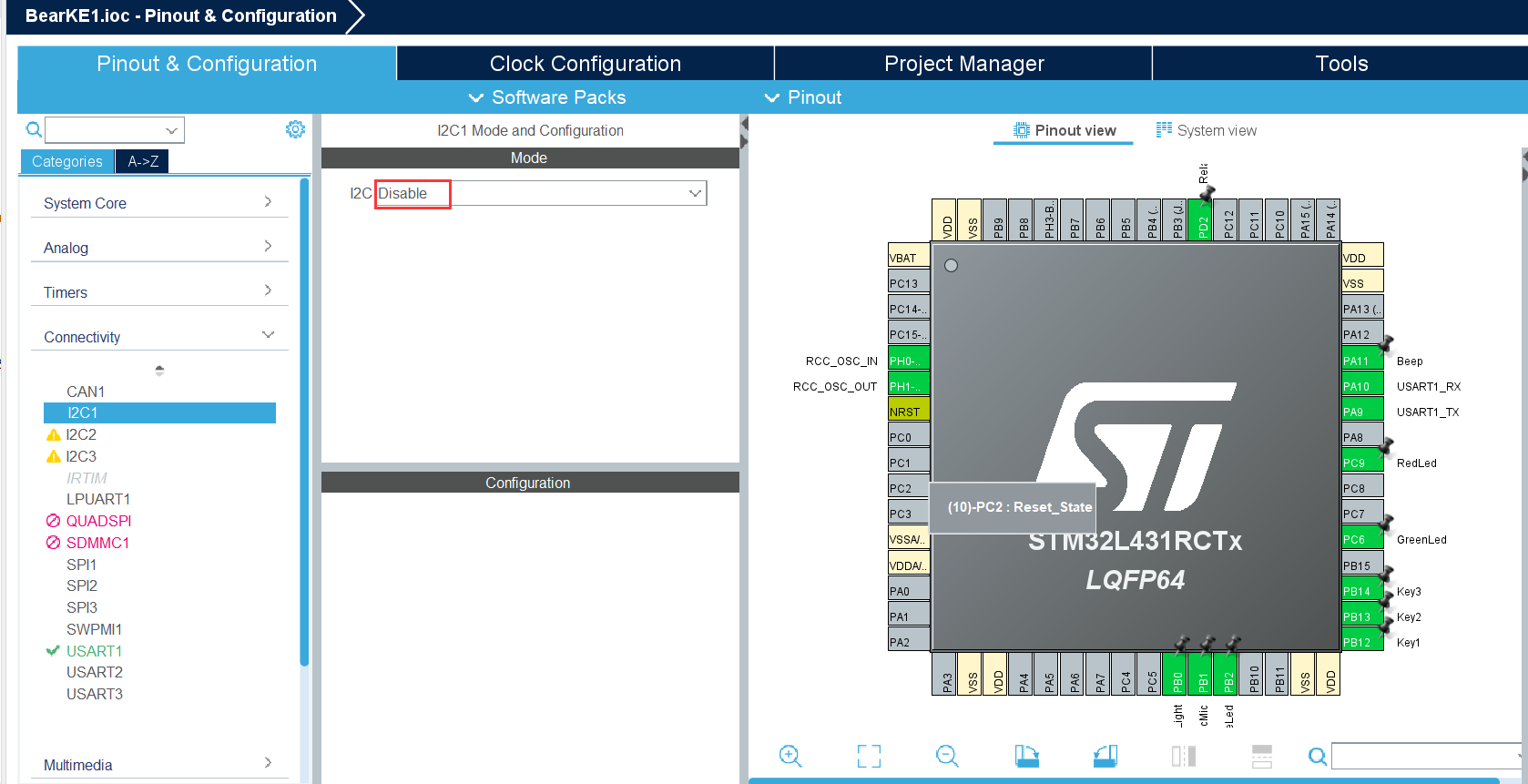
2、GPIO模拟I2C实现采样
一般CPU上的I2C总线个数有限制,很多引脚容易冲突导致没有I2C接口使用,此时我们可以直接拿两个GPIO口来模拟I2C总线。
3、代码实现
GPIO模拟I2C头文件gpio_i2c_sht20.h
/*
* gpio_i2c_sht20.h
*
* Created on: Aug 18, 2023
* Author: asus
*/
#ifndef INC_GPIO_I2C_SHT20_H_
#define INC_GPIO_I2C_SHT20_H_
enum{
NO_ERROR = 0x00, // no error
PARM_ERROR = 0x01, // parameter out of range error
ACK_ERROR = 0x02, // no acknowledgment error
CHECKSUM_ERROR = 0x04, // checksum mismatch error
TIMEOUT_ERROR = 0x08, // timeout error
BUS_ERROR = 0x10, // bus busy
};
enum{
ACK_NONE,
ACK,
NAK,
};
extern int I2C_Master_Receive(uint8_t addr, uint8_t *buf, int len);
extern int I2C_Master_Transmit(uint8_t addr, uint8_t *data, int bytes);
#endif /* INC_GPIO_I2C_SHT20_H_ */
GPIO模拟I2C源文件gpio_i2c_sht20.c
/*
* gpio_i2c_sht20.c
*
* Created on: Aug 18, 2023
* Author: asus
*/
#include <stdio.h>
#include "stm32l4xx_hal.h"
#include "tim.h"
#include "gpio.h"
#include "gpio_i2c_sht20.h"
#define I2C_CLK_STRETCH_TIMEOUT 50
#define CONFIG_GPIO_I2C_DEBUG
#ifdef CONFIG_GPIO_I2C_DEBUG
#define i2c_print(format,args...)printf(format,##args)
#else
#define i2c_print(format,args...)do{}while(0)
#endif
typedef struct i2c_gpio_s
{
GPIO_TypeDef *group;
uint16_t scl;
uint16_t sda;
}i2c_gpio_t;
static i2c_gpio_t i2c_pins = {GPIOB,GPIO_PIN_6,GPIO_PIN_7};
#define SDA_IN() do{GPIO_InitTypeDef GPIO_InitStruct = {0};\
GPIO_InitStruct.Pin = i2c_pins.sda;\
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;\
GPIO_InitStruct.Pull = GPIO_PULLUP;\
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;\
HAL_GPIO_Init(i2c_pins.group,&GPIO_InitStruct);\
}while(0)
#define SDA_OUT() do{GPIO_InitTypeDef GPIO_InitStruct = {0};\
GPIO_InitStruct.Pin = i2c_pins.sda;\
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;\
GPIO_InitStruct.Pull = GPIO_PULLUP;\
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;\
HAL_GPIO_Init(i2c_pins.group,&GPIO_InitStruct);\
}while(0)
#define SCL_OUT() do{GPIO_InitTypeDef GPIO_InitStruct = {0};\
GPIO_InitStruct.Pin = i2c_pins.scl;\
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;\
GPIO_InitStruct.Pull = GPIO_PULLUP;\
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;\
HAL_GPIO_Init(i2c_pins.group,&GPIO_InitStruct);\
}while(0)
#define SCL_H() HAL_GPIO_WritePin(i2c_pins.group,i2c_pins.scl,GPIO_PIN_SET)
#define SCL_L() HAL_GPIO_WritePin(i2c_pins.group,i2c_pins.scl,GPIO_PIN_RESET)
#define SDA_H() HAL_GPIO_WritePin(i2c_pins.group,i2c_pins.sda,GPIO_PIN_SET)
#define SDA_L() HAL_GPIO_WritePin(i2c_pins.group,i2c_pins.sda,GPIO_PIN_RESET)
#define READ_SDA() HAL_GPIO_ReadPin(i2c_pins.group,i2c_pins.sda)
#define READ_SCL() HAL_GPIO_ReadPin(i2c_pins.group,i2c_pins.scl)
//使用时钟延伸
static inline uint8_t I2c_WaitWhileClockStretching(uint16_t timeout)
{
while(timeout-- > 0)
{
if(READ_SCL())
break;
delay_us(1);
}
return timeout ? NO_ERROR :BUS_ERROR;
}
//起始信号
uint8_t I2c_StartCondition()
{
uint8_t rv = NO_ERROR;
SDA_OUT();
SCL_OUT();
SDA_H();
delay_us(1);
SCL_H();
delay_us(1);
#ifdef I2C_CLK_STRETCH_TIMEOUT
rv = I2c_WaitWhileClockStretching(I2C_CLK_STRETCH_TIMEOUT);
if(rv)
{
i2c_print("ERROR:%s() I2C bus busy\n",__func__);
return rv;
}
#endif
SDA_L();//先于SCL先拉低
delay_us(2);
SCL_L();//拉低SCL便于之后的操作
delay_us(2);
return rv;
}
//终止信号
uint8_t I2c_StopCondition(void)
{
uint8_t rv = NO_ERROR;
SDA_OUT();
SCL_L();
SDA_L();
delay_us(2);
SCL_H();
delay_us(2);
#ifdef I2C_CLK_STRETCH_TIMEOUT
rv = I2c_WaitWhileClockStretching(I2C_CLK_STRETCH_TIMEOUT);
if(rv)
{
i2c_print("ERROR:%s() I2C bus busy\n",__func__);
}
#endif
SDA_H();
delay_us(2);
return rv;
}
//写一个字节
uint8_t I2c_WriteByte(uint8_t byte)
{
uint8_t rv = NO_ERROR;
uint8_t mask;
SDA_OUT();
SCL_L();
for(mask=0x80;mask>0;mask>>=1)
{
if((mask & byte) == 0)
{
SDA_L();
}
else
{
SDA_H();
}
delay_us(5);
SCL_H();
delay_us(5);
#ifdef I2C_CLK_STRETCH_TIMEOUT
rv = I2c_WaitWhileClockStretching(I2C_CLK_STRETCH_TIMEOUT);
if(rv)
{
i2c_print("ERROR:%s() I2C bus busy\n",__func__);
goto OUT;
}
#endif
SCL_L();
delay_us(5);
}
SDA_IN();
SCL_H();
delay_us(5);
#ifdef I2C_CLK_STRETCH_TIMEOUT
rv = I2c_WaitWhileClockStretching(I2C_CLK_STRETCH_TIMEOUT);
if(rv)
{
i2c_print("ERROR:%s() I2C bus busy\n",__func__);
goto OUT;
}
#endif
if(READ_SDA())
rv = ACK_ERROR;
OUT:
SCL_L();
delay_us(20);
return rv;
}
//读一个字节
uint8_t I2c_ReadByte(uint8_t *byte,uint8_t ack)
{
uint8_t rv = NO_ERROR;
uint8_t mask;
*byte = 0x00;
SDA_IN();
for(mask = 0x80;mask > 0;mask >>= 1)
{
SCL_H();
delay_us(1);
#ifdef I2C_CLK_STRETCH_TIMEOUT
rv = I2c_WaitWhileClockStretching(I2C_CLK_STRETCH_TIMEOUT);
if(rv)
{
i2c_print("ERROR:%s() I2C bus busy\n",__func__);
goto OUT;
}
#endif
if(READ_SDA())
*byte |= mask;
SCL_L();
delay_us(2);
}
if(ack == ACK)
{
SDA_OUT();
SDA_L();
}
else if(ack ==NAK)
{
SDA_OUT();
SDA_H();
}
delay_us(1);
SCL_H();
delay_us(2);
#ifdef I2C_CLK_STRETCH_TIMEOUT
rv = I2c_WaitWhileClockStretching(I2C_CLK_STRETCH_TIMEOUT);
if(rv)
{
i2c_print("ERROR:%s() I2C bus busy\n",__func__);
}
#endif
OUT:
SCL_L();
delay_us(2);
return rv;
}
uint8_t I2c_SendAddress(uint8_t addr)
{
return I2c_WriteByte(addr);
}
//接收从机发来的信号
int I2C_Master_Receive(uint8_t addr,uint8_t *buf,int len)
{
int i;
int rv = NO_ERROR;
uint8_t byte;
I2c_StartCondition();
rv = I2c_WriteByte(addr);
if(rv)
{
i2c_print("Send I2C read address failure,rv=%d\n",rv);
goto OUT;
}
#ifdef I2C_CLK_STRETCH_TIMEOUT
rv = I2c_WaitWhileClockStretching(I2C_CLK_STRETCH_TIMEOUT);
if(rv)
{
i2c_print("ERROR:%s() I2C wait clock stretching failure,rv=%d\n",__func__,rv);
return rv;
}
#endif
for(i=0;i<len;i++)
{
if(!I2c_ReadByte(&byte,ACK))
buf[i] = byte;
else
goto OUT;
}
OUT:
I2c_StopCondition();
return rv;
}
//发送命令
int I2C_Master_Transmit(uint8_t addr, uint8_t *data, int bytes)
{
int i;
int rv = NO_ERROR;
if(!data)
{
return PARM_ERROR;
}
i2c_print("I2C Mastr start transimit [%d] bytes data to addr [0x%02x]\n", bytes, addr);
I2c_StartCondition();
rv = I2c_SendAddress(addr);
if(rv)
{
goto OUT;
}
for(i=0;i<bytes;i++)
{
if(NO_ERROR != (rv=I2c_WriteByte(data[i])))
break;
}
OUT:
I2c_StopCondition();
return rv;
}
SHT20的驱动源文件sht20.c
/*
* sht20.c
*
* Created on: Jul 21, 2023
* Author: asus
*/
#include <stdio.h>
#include "stm32l4xx_hal.h"
#include "sht20.h"
#include "tim.h"
/*通过该宏控制是使用HAL库里的I2C接口还是CPIO模拟串口的接口*/
#define CONFIG_GPIO_I2C
#ifdef CONFIG_GPIO_I2C
#include "gpio_i2c_sht20.h"
#else
#include "i2c.h"
#endif
//#define CONFIG_SHT20_DEBUG //用于调试,打开时由printf,发布产品时注释掉,printf语句会被替换成do{}while(0)
#ifdef CONFIG_SHT20_DEBUG
#define sht20_print(format,args...)printf(format,##args)
#else
#define sht20_print(format,args...)do{}while(0)
#endif
int SHT20_SampleData(uint8_t cmd,float *data)
{
uint8_t buf[2];
float sht20_data = 0.0;
int rv;
#ifdef CONFIG_GPIO_I2C
rv = I2C_Master_Transmit(0x80,&cmd,1); //GPIO模拟I2C采样
#else
rv = HAL_I2C_Master_Transmit(&hi2c1,SHT20_ADDR_WR,&cmd,1,0xFFFF);//基于HAL库实现I2C采样
#endif
if(0 != rv)
{
return -1;
}
if(cmd == 0xF3)
{
HAL_Delay(85);
}
else if(cmd == 0xF5)
{
HAL_Delay(29);
}
#ifdef CONFIG_GPIO_I2C
rv = I2C_Master_Receive(0x81,buf,2);
#else
rv = HAL_I2C_Master_Receive(&hi2c1,SHT20_ADDR_RD,buf,2,0xFFFF);
#endif
if(0 != rv)
{
return -1;
}
sht20_data = buf[0];
sht20_data=ldexp(sht20_data,8);
sht20_data += buf[1]&0xFC;
if(cmd == 0xF3)
{
*data = (-46.85+175.72*sht20_data/65536);
}
else if(cmd == 0xF5)
{
*data = (-6+125*sht20_data/65536);
}
return *data;
}
SHT20的驱动头文件sht20.h
/*
* sht20.h
*
* Created on: Jul 21, 2023
* Author: asus
*/
#ifndef INC_SHT20_H_
#define INC_SHT20_H_
#include "stm32l4xx_hal.h"
#define SHT20_ADDR 0x40
#define SHT20_ADDR_WR (SHT20_ADDR<<1) //写地址
#define SHT20_ADDR_RD ((SHT20_ADDR<<1) | 0x01) //读地址
#define SOFT_RESET_CMD 0xFE //复位
#define TEMP_CMD 0xE3
#define RH_CMD 0xE5
extern int SHT20_SampleData(uint8_t cmd,float *data);
#endif /* INC_SHT20_H_ */
修改main.c文件
int report_tempRH_json(void)
{
char buf[128],temp[20],humd[20];
float temperature,humidity;
SHT20_SampleData(0xF3,&temperature);//温度
SHT20_SampleData(0xF5,&humidity);//湿度
memset(buf,0,sizeof(buf));
snprintf(buf,sizeof(buf),"{\"Temperature\":\"%.2f\",\"Humidity\":\"%.2f\"}",temperature,humidity);
//转换为字符串形式打印出来
HAL_UART_Transmit(&huart1,(uint8_t *)buf,strlen(buf),0xFFFF);
return 0;
}
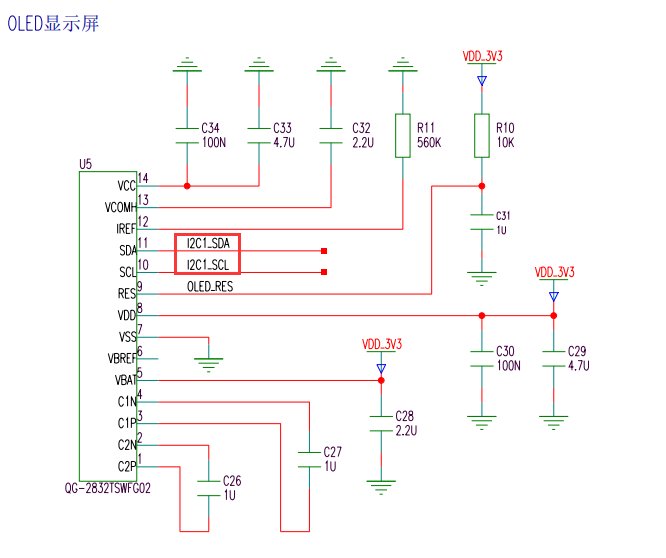
四、OLED显示
1、OLED显示屏介绍
开发板上配备的OLED显示屏通过I2C接口连接到单片机的PB6,PB7管脚上。
2、添加OLED驱动文件
修改main.c文件
OLED_Init();//初始化
int report_tempRH_json(void)
{
char buf[128],temp[20],humd[20];
float temperature,humidity;
SHT20_SampleData(0xF3,&temperature);
SHT20_SampleData(0xF5,&humidity);
memset(buf,0,sizeof(buf));
snprintf(buf,sizeof(buf),"{\"Temperature\":\"%.2f\",\"Humidity\":\"%.2f\"}",temperature,humidity);
/*将温度和湿度转为字符串形式*/
memset(temp,0,sizeof(temp));
snprintf(temp,sizeof(temp),"%.2f",temperature);
memset(humd,0,sizeof(humd));
snprintf(humd,sizeof(humd),"%.2f",humidity);
/*调用函数在OLED显示屏上显示*/
// OLED_ShowString(0,0,"Temperature:",16);//显示英文字符
OLED_ShowChinese(&Hzk_Temp,0,0,0);//显示汉语
OLED_ShowChinese(&Hzk_Temp,32,0,1);
OLED_ShowString(48,0,":",16);
OLED_ShowString(72,0,temp,16);//显示温度
// OLED_ShowString(0,2,"Humidity:",16);
OLED_ShowChinese(&Hzk_Humd,0,2,0);
OLED_ShowChinese(&Hzk_Humd,32,2,1);
OLED_ShowString(48,2,":",16);
OLED_ShowString(72,2,humd,16);
HAL_UART_Transmit(&huart1,(uint8_t *)buf,strlen(buf),0xFFFF);
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号