TM1652入门学习手册
TM1652入门学习手册
1. TM1650概述
TM1652 是一款LED(发光二极管、数码管、点阵屏)驱动控制专用芯片,内部集成了数字通讯电路、解码电路、数据锁存器、震荡器、LED驱动电路。通讯方式采用异步串口通信(UART)协议,因芯片只接收单片机发来的数据,仅需要单片机的一个TX端口发送数据给芯片即可,实现单线通讯;在显示驱动方面,芯片采用动态扫描方式,两种显示模式可选,8级段驱动电流可调,16级位占空比可调;TM1652内置消隐处理优化电路。
本产品应用在各种消费类电子产品上,用途非常广泛,如:空调面板、洗衣机面板、DVD 显示面板、机顶盒显示等。本产品性能优良,质量可靠。
2. 特性说明
- 采用功率CMOS工艺
- 典型工作电压:5V
- 支持共阴数码管显示
- 两种显示模式(7段×6位,8段×5位)
- 辉度调节电路(位占空比16级可调、段驱动电流8级可调)
- 串行接口(SDA),兼容串口通信(UART)协议,支持波特率19200bps
- 内置 OSC 频率 2.5M
- 内置上电复位电路
- 内置针对暗亮问题的优化电路
- 封装形式:SOP16
3. 管脚定义:
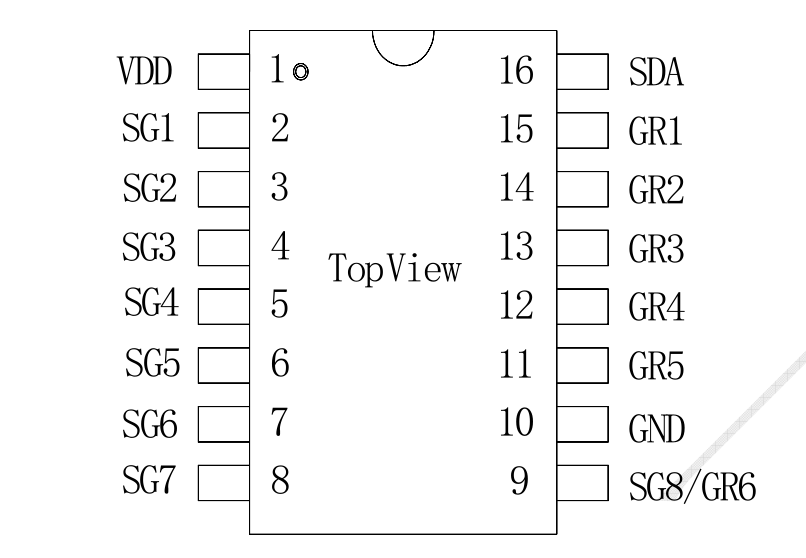
4. 管脚功能定义:

5. 通信协议
本芯片采用异步串口通信(UART)协议,工作原理是将传输数据的每个字符以串行方式一位接一位
的传输。下图给出了其工作模式:

TM1652 每一位的时间为:52us。
其中每一位(bit)的意义如下:
▲起始位:为由高变低,低电平时间为一位的时间,表示传输字符的开始。
▲数据位:紧跟起始位之后,D0-D7,低位先发。
▲校验位:为一位的时间,如果 8 位数据位中 1 的个数为奇数,该位设为 0(置低电平),否则为 1(置
高电平)。
▲停止位:置高。时间为一位的时间,它是发送完一个字符数据的结束标志。
▲空闲位:置高。如果空闲位置高的时间大于 3ms,TM1652 就认为本次数据帧结束,本次数据从暂存器
打入相应寄存器开始控制芯片输出。如果一帧数据传输没有结束,那么建议设置空闲位时间范围在
0-0.5ms 以内。
TM1652 的一帧数据包括以下两种形式:
⑴ 显示地址命令+显示数据;
⑵ 显示控制命令+显示控制调节命令。
波特率:是衡量数据传输速率的指针。表示为每秒钟传送的二进制位数(bit 数)。例如资料传送速率
为 120 字符/秒,而每一个字符为 11 位,则其传送的波特率为 11×120=1320 bit/秒=1320
波特。TM1652 支持波特率范围为:17500bps~21200bps,这里我们建议用 19200bps 即每位的时间为:1s(秒)/19200≈52us(微秒)。所以 TM1652 支持的每位的时间范围为:47us~57us。
在用 IO 模拟 UART 通讯时候,SDA 数据的位宽应该满足提供的位宽范围。
6.数据包传输方式:地址自动加1模式
使用地址自动加1模式,设置地址实际上是设置传送的数据流存放的起始地址。起始地址命令字发
送完毕,紧跟着发送数据,最多6BYTE,数据发送完毕后置高数据线。

Command1:选择显示地址命令(0x08)
Data1~Data n:发送显示数据(最多6bytes)
Time:数据线置高时间(最小时间为3ms)
CommandX:选择显示控制命令(0x18)
CommandY:发送显示控制调节命令(包括位占空比、段驱动电流以及显示模式设置)
实例1 Eg1_TM1652——【基于STM32F103】
本节我们目标是实现TM1652点亮5位共阴极数码管,显示“0~99999”计数;
1 硬件设计
GPIO初始化配置 SDA(PB0),推挽输出,通过IO模拟驱动UART的TX驱动TM1652,波特率19200
2 软件设计
首先是TM1652初始化TM1640_GPIO_INIT,设置为推挽输出,如下:
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
/*Configure GPIO pin : PB0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
接着设置TM1652,并写入段码
void TM_Digtal_Display(u16 num)
{
tm1652_send_data(0x08);
tm1652_send_data(CODE[num/10000]);//"0"
tm1652_send_data(CODE[num%10000/1000]);//"0"
tm1652_send_data(CODE[num%1000/100]);//"0"
tm1652_send_data(CODE[num%100/10]);//"0"
tm1652_send_data(CODE[num%10]);//"0"
delay_ms(5);
tm1652_send_data(0x18);
tm1652_send_data(0x1C);//设置位占空比为 15/16,设置段驱动电流为 8/8,最大亮度
}
3 下载验证
显示"0~99999";


 浙公网安备 33010602011771号
浙公网安备 33010602011771号