Mark Sweep GC
标记清除算法
GC 标记-清除算法是由标记阶段和清除阶段构成。标记阶段把所有活动的对象做上标记。清除阶段是吧没有标记的对象也就是非活动的对象进行回收。通过这两个阶段就可以对空间进行重新利用。
mark_sweep()函数
mark_sweep(){
mark_phase() //标记
sweep_phase() //清除
}
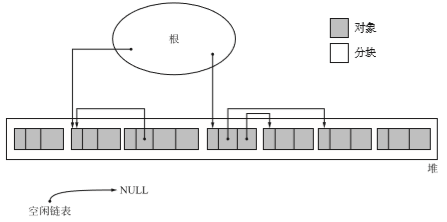
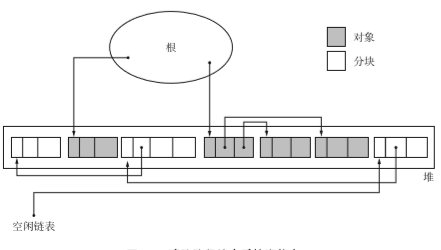
在执行GC前堆的状态
标记阶段
使用 mark_phase()函数进行处理。在标记阶段,collector会为堆里所有活动的对象打上标记。我们首先要通过根找到直接引用的对象进行标记,之后才能递归的访问到对象并把所有活着的对象进行标记。
mark_phase()
mark_phase(){
for(r:$roots)
mark(*r) //从根开始取它的孩子进行标记
}
mark(obj){
if(ob.mark == FALSE)
obj.mark = TRUE // 如果还是标记是FALSE则改为TRUE
for(child :children(obj)) // 再去递归的标记自己的孩子
mark(*child)
}
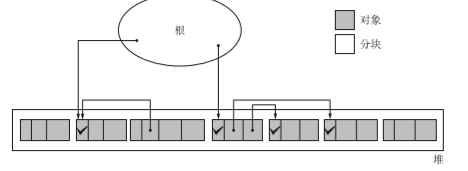
标记完所有对象后,标记活动就结束了。这时,状态如下图所示。
在标记阶段中,程序会标记所有活动对象,毫无疑问,对象越多需要的时间就越多。他们是正相关的。
深度优先于广度优先
这时一个老生常谈的问题了。应用很广,因为像这种类型可能没有其他方式遍历了,其使用的队列和递归也是非常常用的。
深度优先depth-first search 使用递归实现
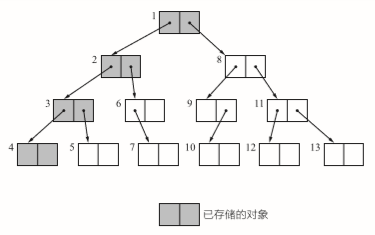
广度优先breadth-first search 使用队列实现
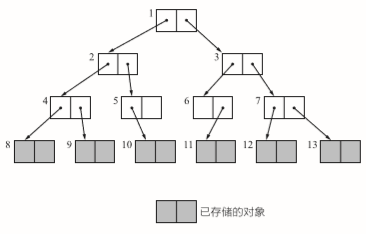
无论使用哪种方法,搜索的对象时不会变的。但是深度优先可以压低内存的使用量,因此我们经常实用深度优先。
清除阶段
在清除阶段,cllector会遍历整个堆。回收垃圾,使其能再次利用。此时出现了size的域这是存储对象大小的域,同mark一样我们在头中定义了它。简单的说,在块的头中现在有mark和size。mark表示时候有用,size表示块的大小。
sweep_phase()
sweep_phase(){
sweeping = $heap_start //堆头
while(sweeping < $heap_end) //现在为止在堆尾之前
if(sweeping.mark == TRUE)
SWEEPING.mark = FALSE //这里标记为false。因为如果以后不再使用了她就能被回收,否则就不能回收了。
else
sweeping.next = $free_list //初始化空链表
$free_list = sweeping // 连接到一个free链表上
sweeping += sweeping.size //可以看做是基址+偏移。拿到下一个块地址
}
通过上面的操作,我们拿到了free_list。之后我们针对它进行分配空间操作。下图就表现出gc后两个链表
清除阶段同理,会遍历所有块进行垃圾回收。时间和堆的大小成正相关。
分配
那么对于垃圾回收的再利用是怎么进行的呢?。当mutator申请分块时,怎样才能分呢?
我们使用nwe_obj函数来分配。
new_obj
nwe_obj(){
chunk = pickup_chunk(size, $free_list) // 我需要的大小size 和查找对象 free_list
if (chunk !=NULL)
return chunk //拿到了
else
allocation_fail() // 拿不到
}
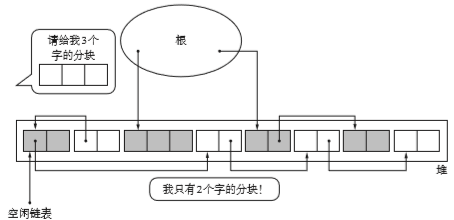
在分配的时候有几个点:不能分配比size小的,只能使用大于等于size的块去进行分配,如果大小合适再好不过,如果大了就需要去分割一个和size一样大小的块再分配,剩余部分返回空链表。
First-fit、Best-fit、Worst-fit三种分配策略
- First-fit:最初发现大于等于size的分块就进行操作。可能第一个就比size大,但是第二个就和size一样大。这样就直接分了第一个,碎片严重。
- Best-fit:遍历空链表,选择最合适的。性能低啊。
- Worst-fit:找出空闲链表中最大的块,分割成size和其他。也容易产生碎片,比第一个还容易,不推荐使用。
综上, 考虑到碎片和性能问题,选择First-fit还是比较明智的选择。
合并
根据分配策略会生成大量小块,但是如果小块是连续的我们其实可以将它连接起来成为一个大块。这就叫做合并coalescing
sweep_phase()
sweep_phase(){
sweeping = $heap_start //堆头
while(sweeping < $heap_end) //现在为止在堆尾之前
if(sweeping.mark == TRUE)
SWEEPING.mark = FALSE //这里标记为false。因为如果以后不再使用了她就能被回收,否则就不能回收了。
else
if(sweeping = $free_list+$free_list.size)// 先验证是不是相邻的。
$free_list.size +=sweeping.size //这样就连接起来了。
else
sweeping.next = $free_list //初始化空链表
$free_list = sweeping // 连接到一个free链表上
sweeping += sweeping.size //可以看做是基址+偏移。拿到下一个块地址
}
优点
实现简单
他其实就是用到了标识位,然后进行遍历。算法上难度很低。不像其他算法难度是比较大的。
与保守式GC算法兼容
在保守式GC中,对象时不能被移动的。例如复制算法他就是将数据复制过来,在复制过去,是移动的。而标记清除不移动对象,所以非常适合保守式GC算法。实际上很多采用保守式gc的程序中使用到了标记清除。
缺点
碎片化
算法使用过程中产生被细化的分块,在不久后就会散落在各处。我们将这种状况称为碎片化(fragmentation)。windows文件系统也会有这种现象。
如果发生了碎片化,及时空闲链表再大,也不能分配成功。为了解决这个问题可以采用压缩,但是本文中介绍了一下BIBOP法提供参考。
分配速度
标记清除算法中分块不是连续的,因此每次都需要遍历链表。在最糟糕的情况下是每次是链表的最后一块。因此速度非常慢,如果一个大型游戏采用这种方式后果可想而知。
后文叙述的多个空闲链表和BIBOP都是为了解决速度而采取的方案。
与写时复制技术不兼容
写时复制技术(copy-on-write)是在Linux等众多unix操作系统的虚拟存储中使用的高速化方案。例如在Linux复制进程使用fork()时,大部分空间都不会被复制。如果说为了复制进程就复制了所有空间这样内存怎么多也不够。因此写时复制技术就假装复制了内存空间实际上是共享内存空间。
当然我们对共享的空间写入时不能直接写它,因为它是别的。这时候就要将其复制到自己的私有空间然后进行重写。复制后之访问私有空间不访问共享空间。
但是标记清除算法,就算是没有重写,也会进行不断的复制。实际上我们还是希望它是用共享,而不是浪费内存。为了处理这个问题我们采用为图标记法bitmap marking。
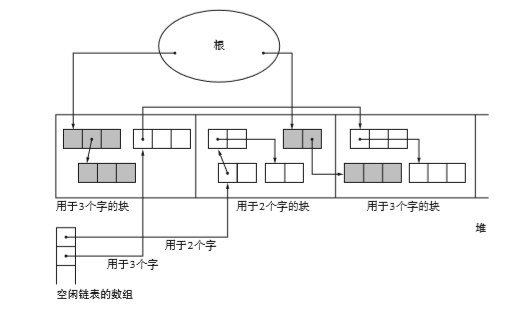
多个空闲链表
之前的算法中使用的只有一个空闲链表,对大块和小块进行统一的处理。这样一来无论大小都要遍历很长的链。
因此我们对块进行分类。大的是一组,小的是一组。这样一来按照mutator所申请的空间大小选择合适的块就容易的多。
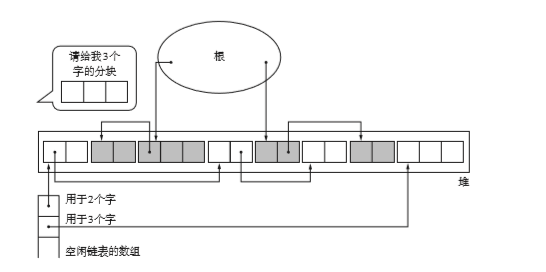
一般情况来说,mutator很少会申请非常大的分块。为了应对这种极少数情况,我们给分块设定一个上限。如果分块大于等于这个大小,就全部采用一个空链表。
利用多个空链表时,我们需要修正new_obj()以及sweep_phase()
new_obj
nwe_obj(){
index = size/(WORD_LENGTH/BYTE_LENGTH) //根据商来选择合适的建表
if (index <=100 ) //小于100字
if($free_list[index] !=NULL)
chunk = $free_list[index] // 获取链的索引,分给他一个index字链上的第一块
$free_list[index] = $free_list[index].next
return chunk
else //大于100字
chunk = pickup_chunk(size, $free_list[101]) // 我需要的大小size 和 查找对象 free_list
if (chunk !=NULL)
return chunk //拿到了
else
allocation_fail() // 拿不到
}
sweep_phase()
sweep_phase(){
for(i:2...101)
$free_list[1] = NULL
sweeping = $heap_start //堆头
while(sweeping < $heap_end) //现在为止在堆尾之前
if(sweeping.mark == TRUE)
SWEEPING.mark = FALSE //这里标记为false。因为如果以后不再使用了她就能被回收,否则就不能回收了。
else
index = size/(WORD_LENGTH/BYTE_LENGTH)
if(index <=100)
sweeping.next = $free_list[index]
$free_list[index] = sweeping
else
sweeping.next = $gree_list[101]
$free_list[101] = sweeping
sweeping += sweeping.size //可以看做是基址+偏移。拿到下一个块地址
}
BIBOP法
BiBOP是Big Bag Of Pages的缩写,就是将大小相近的对象整理成固定大小的块进行管理的做法。我们可以使用这个方法把堆分成固定大小的块,让每个块只能配置同样大小的对象这就是BiBOP算法。不觉得内存利用效率低吗?熊die。
如图所示,在多个分块中残留同样大小的对象反而会使堆的使用效率低下。
位图标记
在以前的标记清除算法中,标记是在对象头中的,这样造成了与写时复制技术的不兼容。对此收集头部标识表格化将标识与对象分开管理。这样的标记方法称为位图表格(bitmap table)。位图标记可以采用如散列表,树形结构等。为了简单起见我们使用数组。如下图。
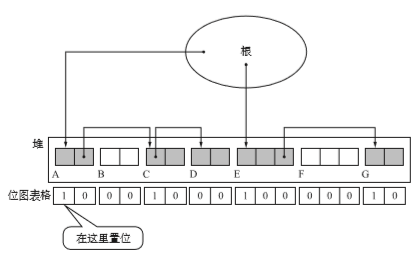
表中的位置和堆里的对象一一对应。一般来说堆中的一个字会分到一个位。
mark()
mark(obj){
obj_num = (obj-$heap_start)/WORD_LENGTH
index = obj_num / WORD_LENGTH
offset = obj_num % WORD_LENGTH
if (($bitmap_tbl[index]&(1<<offset))==0)
$bitmap_tbl[index] != (1<<offset)
for (child :children(obj))
mark(*child)
}
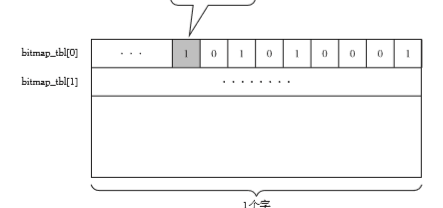
这里WORD_LENGTH 是个常量,表示各机器中1个字的位宽。obj_num指从位图表格前面数起,obj的标志位在第几个。例如上图中E,它的obj_num就是8.但是bitmap的图是从后往前的所以E的标志位应该从右往左数是第九个位。如下图
优点
与写时复制技术兼容
以往标记位是对对象进行设置,而位图标记不对对象进行设置采用了映射或许可以理解为引用。所以自然不会发生无谓的复制。
清除操作更高效
利用位图表格的清除操作把所有对象的标志位集合到一处,可以快速定位。与一般的清除阶段相同,我们sweeping遍历整个堆,不过这里使用了index和offset两个变量,在遍历堆的同时也遍历位图表格。
sweep_phase
sweep_phase(){
sweeping = $heap_start
index = 0
offset = 0
while(sweeping <$heap_end)
if($bitmap_tb1[index] &(1<<offset) ==0)
sweeping.next = $free_list
$free_list = sweeping
index +=(offset + sweeping.size) /WORD_LENGTH
offset = (offset + sweeping.size) % WORD_LENGTH
sweeping += sweeping.size
for (i:0...(HEAP_SIZE/WORD_LENGTH-1))
$bitmap_tbl[i] = 0
}
注意
对象地址和位图表格对应。通过对象的地址求与其对应的位置标志,要进行位运算的。再有多个堆且地址不连续的情况下,必须采用多个表。即每个堆一个表。
延迟清除法
我们之前说过,清除花费的时间和堆的大小成正比。这样一来堆越大就越影响mutator。会越慢。
延迟清除(Lazy Sweep)是缩减因清除操作而导致的mutator最大暂停时间的方法。在标记操作结束后,不一并进行清除。通过延迟来防止mutator长时间暂停。
nwe_obj
nwe_obj(size){
chunk = lazy_sweep(size)
if (chunk!=NULL)
return chunk
mark_phase()
chunk = lazy_sweep(size)
if(chunk !=NULL)
return chunk
allocation_fail()
}
分配时调用lazy_sweep进行清除。如果他能用清除操作来分配块,就会返回分开,如果不能分配块就会执行标记操作。当lazy_sweep函数返回NULL时就是没有找到。那就在进行一遍此操作。如果还没能分得代表没有分块。mutator也就不需要进行下一步处理。
lazy_sweep
lazy_sweep(size){
while($sweeping <heap_end)
if($sweeping.mark == TRUE)
$sweeping.mark = FALSE
else if($sweeping.size >=size)
chunk = $sweeping
$sweeping +=$sweeping.size
return chunk
$sweeping += $sweeping.size
$sweeping = $heap_start
return NULL
}
次函数会一直遍历堆,知道找打大于等于所申请的空间。再找到时候会将其返回,但是$sweeping是全局变量,也就是说遍历开始位置谓语上一次清除操作中发现的分块右边。
当次函数没有找打分块时候会返回NULL。
此方法在分配时执行必要的遍历,因此可以压缩清除操作导致mutator暂停的时间,这就是延迟的意思。
只有延迟清除是不够的
虽然可以减少mutator的暂停时间。但是延迟清除的效果是不均匀的。打个比方如下图。

垃圾变成了垃圾堆,活动对象变成了活动对象堆。这种情况下,程序清除垃圾较多的部分时马上就能获得分块,随意能减少mutator的暂停时间。然鹅一旦程序开始清除活动对象周围就怎么也获得不了分块,这就增加了mutator的暂停时间。
至于有什么其他方法。后续会在其他文章里。
posted on 2018-11-13 04:49 Léon_The_Pro 阅读(442) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号