


组会8-1
记录下组会收获:
PID的几种特殊情况:
1.积分分离。由于积分项取值不当通常会使系统产生较大振荡,使系统稳定性降低。但是积分项有着消除稳态误差的优点。想要保持优点,限制缺点。积分分离就是在控制量不太稳定时,不需要积分项的作用,只是在最后控制量稳定的时候加入积分项用于消除稳态误差。
2.遇限削弱。这个算法是考虑到实际执行器的输入信号是有限度的。比如阀门的开度可以接受4-20mA的电流。因此最好控制器的输出也不要超过限值。而积分环节导致的振荡就有可能使得超调量过大,大到超过限制。故遇限削弱的思想是在控制信号输出接近于饱和时,抑制积分器的作用,或者只进行有助于削弱饱和程度的积分运算。
3.不完全微分环节。传统PID中微分项对于高频噪声很敏感,故我们可以专门针对高频噪声,加一个低通滤波器,抵消微分项的影响。
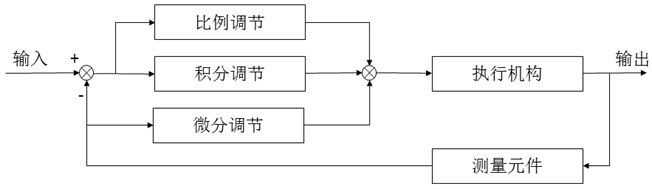
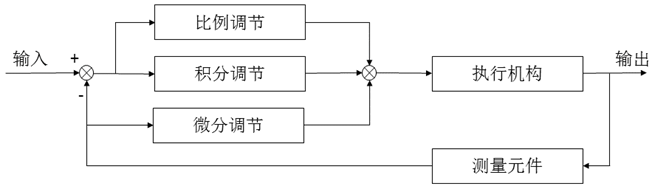
4.微分先行。如下图所示,可以看到微分环节不对偏差信号进行处理,而是跳过了输入信号,直接处理输出信号,因此微分先行适用于期望信号波动剧烈的情况
5.带死区的PID。在PID控制器前面加一个死区调节器。当系统的偏差小于一定范围时,就认为偏差为0,当系统偏差大于一定值时,再启用PID调节。
神经网络:
神经网络示意图如下:
上述神经元主要包括一个求和单元,将输入信号加权求和,属于线性计算,激活函数为一个非线性单元,两者结合。再加上多个神经元,可以模拟输出和输入的关系。我对于神经网络的理解为,就像多输入多输出系统,神经网络输入层和输出层可以看作系统多输入和多输出。神经网络里面的各种系数就相当状态矩阵里面的系数。优化神经网络的参数就像自适应确认状态矩阵的系数。具体的方法就是定义一个输出误差的损失函数。就像模型预测控制里面的目标函数一样。接着通过梯度下降法来快速确认合适的权重系数。当然这只是神经网络大致思想,具体的激活函数,隐层的选取还有很多学问。

