[香橙派开发系列]使用wiringPi控制26个引脚
前言
不管是对什么开发板来说,开发需要使用到一些包,像stm32就需要用到一些包,香橙派也是一样的,也是需要使用到一些软件包才能进行开发。
一、香橙派使用的包
香橙派这里使用的包是wiringOP,这个包有python版,所以用python进行开发要方便一点,但是呢,毕竟我是学嵌入式的,开发单片机都是使用C语言,让我使用python确实不太好,所以我昨天就研究了一下,在/usr/src/目录下有两个wiringOP文件夹

这有一个wiringOP和一个wiringOP-Python,有一个是C语言的,有一个是Python的,这里我看了一下wiringOP下的文件,发现它是由wiringPi这个包进行改写的,但是还是可以使用wiringPi中的函数进行开发

知道了这个就可以开始开发了,所以我花了点时间对wiringPi中的函数进行了一下学习,随便写了这篇文章。
二、使用wiringPi包的命令
学过树莓派的应该对这个包比较熟悉,没有学过的就跟着我一起来学习吧。
首先使用得先获得这个包,如果你是在香橙派官网中下载的ubuntu或者是其他系统的话,这个包是会在里面的,所以可以不用下载。如果你不是从官网上下载的,需要下载一下这个包。
1.下载wiringOP
首先需要更新一下软件包
sudo apt update
然后下载一下git
sudo apt install -y git
下载完成后就可以用git从github上拉取wiringOP软件包了
git clone https://github.com/orangepi-xunlong/wiringOP.git -b next
然后编译一下这个软件包,先到wiringOP这个目录
cd wiringOP
然后编译一下
sudo ./build clean
然后运行进行安装
sudo ./build
安装好后检查一下这个包是否安装成功,这里使用
gpio readall
进行查看,如果出现下面的界面就证明安装成功了
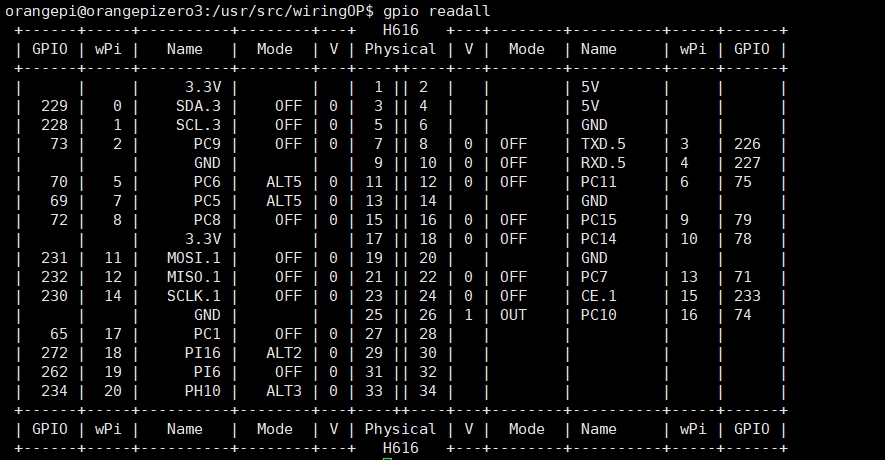
这个界面是可以查看你这个香橙派所对应的引脚和状态的界面。
2.gpio readall信息分析
这里可以看到有很多信息,首先就是芯片的型号H616,然后表格里面有GPIO、wPi、Name、Mode、V、Physical。下面我那个表给大家说明一下
| 名称 | 说明 |
|---|---|
| GPIO | 引脚在寄存器中的地址 |
| wPi | 在wiringPi中所对应的值 |
| Name | 引脚的名称 |
| Mode | 引脚的状态 |
| V | 改引脚的电平值 |
| Physical | 引脚的位置 |
这里的wPi是在后面会经常使用的一个值,这个需要经常查看一下。
Mode的状态可以看下面的表
| 状态 | 说明 |
|---|---|
| OFF | 关闭 |
| OUT | 输出 |
| IN | 输入/上拉输入/下拉输入 |
3.设置gpio的模式
学过32的应该知道,要对引脚操作首先需要打开时钟,然后配置引脚的模式,但是在香橙派中就不用这么麻烦,因为底层和用户层之间有一个HAL板件支持包,所以操作起来就非常的简单,只需要设置一下引脚模式即可,这里我设置一下PC10(因为这个引脚好插杜邦线),首先用命令的模式来进行设置。
这里先将PC10设置为输出模式out,首先找到PC10的wPi值,这里通过前面说的gpio readall就可以查找到,它的wPi值是16,就可以使用下面的命令来进行设置了
gpio mode 16 out
设置完成后可以用gpio readall查看一下状态
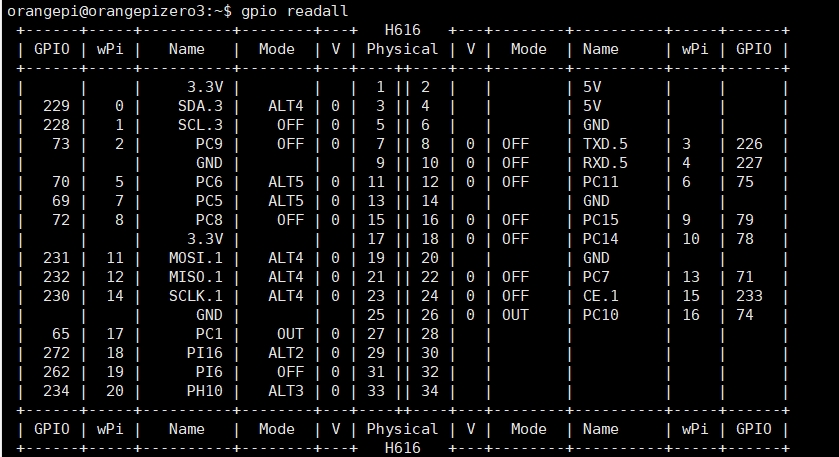
可以看到PC10的mode变成了OUT。
输出模式就是输出一些电平,比如说一开始电平V是0,那么变成了输出模式后这个引脚就会输出低电平。
4.设置gpio输出的电平
学过单片机的都知道,在单片机中输出的只有高电平和低电平,这个在程序中的表达是:1表示高电平,0表示低电平,所以我们可以通过程序来控制单片机引脚输出高电平和低电平。
控制操作也是比较简单,使用的是下面的指令:
gpio write wPi 电平
wPi不用多说了,电平是0和1来表示,比如说我让刚才的PC10变成高电平,使用的命令是
gpio write 16 1
执行完成后就会让PC10变成高电平了,这里还是使用gpio readall来进行查看
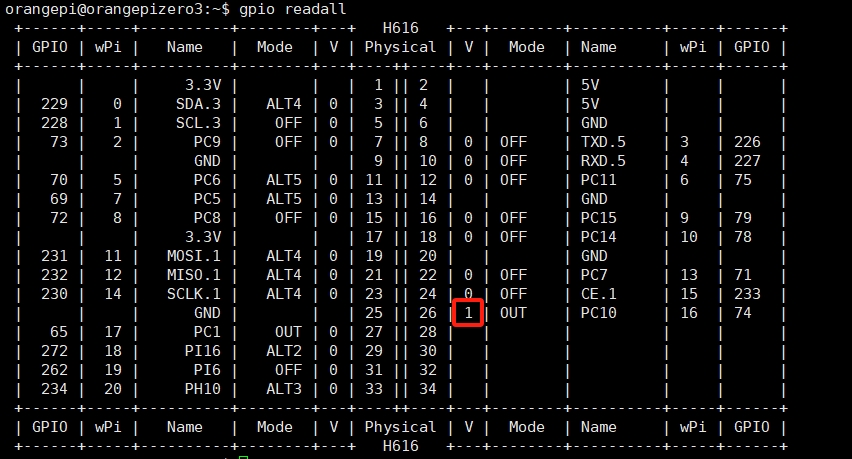
可以看到这个引脚的电平变成了高电平,如果对这个概念还是不明白的话,我用面包板搭建一个简单的电路展示一下
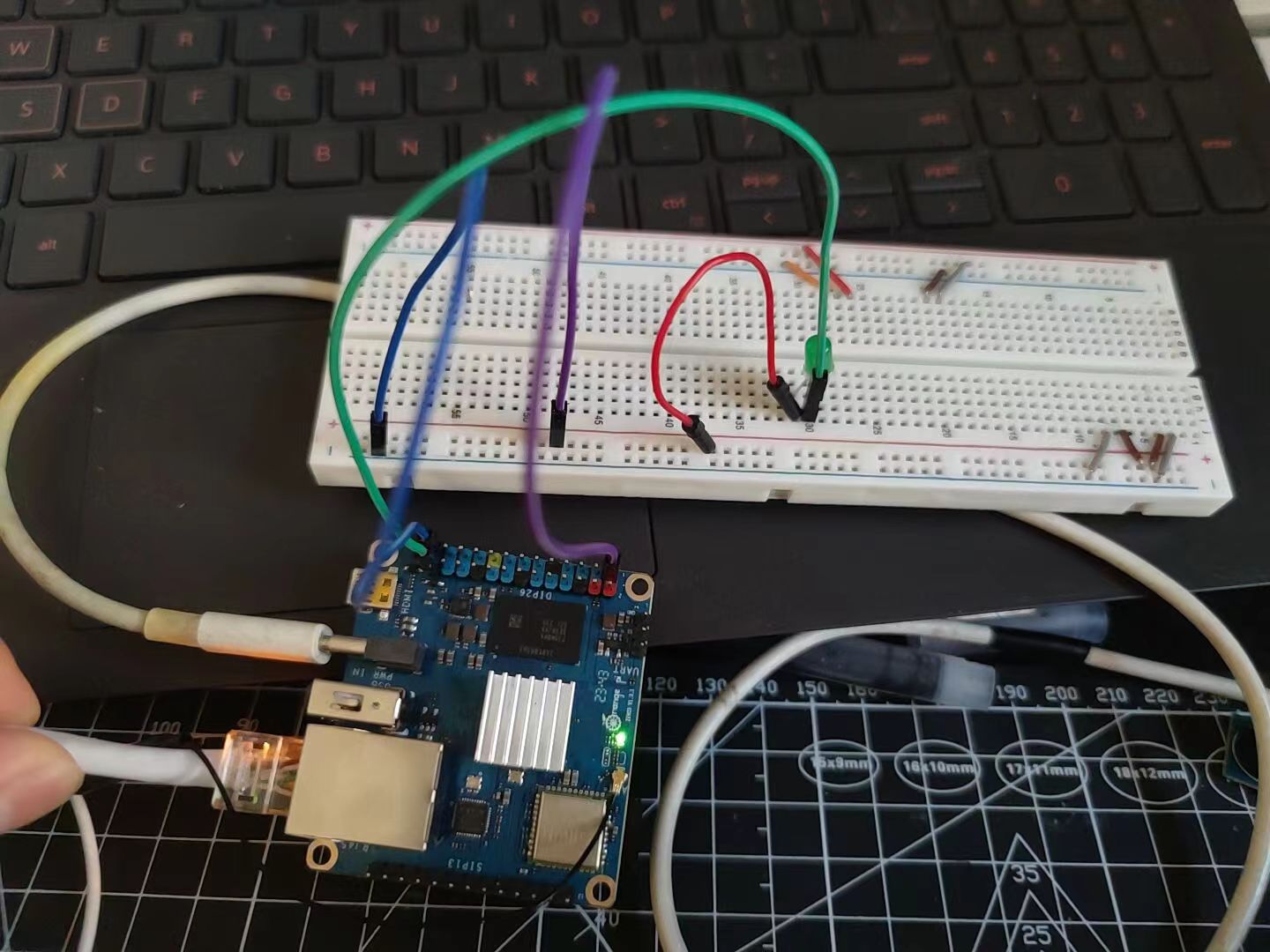
这里我将LED的负极连接到PC10这个引脚上,然后正极连接到单片机上的3.3V位置,可以看到现在的LED没有亮,是因为PC10这个引脚是高电平,两端都是高电平是不会通的。
现在我将PC10改成低电平再来看看效果
gpio write 16 0
效果如下
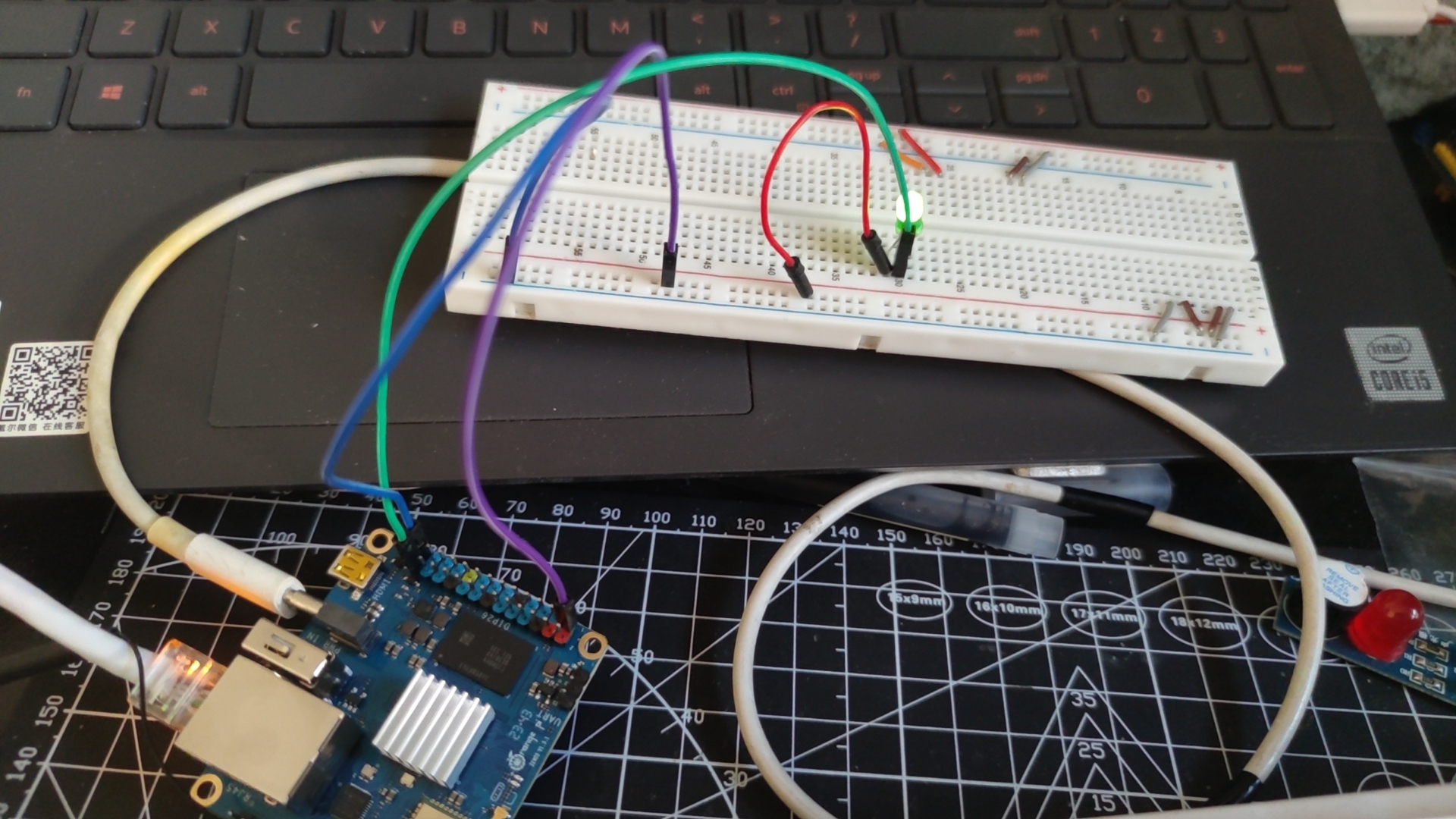
可以看到这个已经亮了,这个就是改变引脚的电平的指令,并且讲一下电平的概念。
三、wiringPi软件实现
前面讲的都是命令行的实现,但是咱不可能一直用命令来写一个复杂的功能,最重要的还是要落实在程序方面,所以现在来给大家介绍一下软件怎么写。
1.初始化函数
首先在软件中需要初始化一下引脚,使用的函数是
int wiringPiSetup (void) ;
这个函数会初始化一下引脚,但是你调用这个函数的话,在执行的时候需要提升一下权限或者使用root才可以执行,当然这个初始化函数有一个替代的函数,这个替代的函数不需要提权
int wiringPiSetupSys (void)
这个函数不是使用操作系统来进行初始化,而是使用/sys/class/gpio接口来进行初始化的,在此种模式下的管脚号是 Broadcom 的 GPIO 管脚号,这种方法我们不考虑。
我们首先用一下第一个函数来进行一下初始化
#include <wiringPi.h>
#include <stdio.h>
int main(){
wiringPiSetup();
return 0;
}
这样就可以进行一下初始化的操作,然后就可以进行后面的操作了。
2.设置gpio的模式
这里使用的是
void pinMode (int pin, int mode)
这个函数需要配合上面说的wiringPiSetup函数进行初始化,否则使用不了

第一个参数是wPi的值,第二个参数是设置的模式,可以有下面的几种模式:
| 模式 | 说明 |
|---|---|
| OUTPUT | 输出模式 |
| INPUT | 输入模式 |
| PWM_OUTPUT | 脉冲输出 |
| GPIO_CLOCK | GPIO时钟 |
这些模式都是用宏定义定义了的,直接写即可。
然后我们将PC10的模式设置为输出模式
#include <wiringPi.h>
#include <stdio.h>
int main(){
wiringPiSetup(); // 记得初始化
pinMode(16, OUTPUT);
return 0;
}
这样就可以将PC10设置为输出模式了。
3.输出电平
然后我们就可以通过代码来输出电平了,这里我们可以按照32的写法,写一个死循环,但是毕竟这个是高级的单片机,所以我们就不写死循环了,毕竟你一个香橙派不止可以跑一个程序,所以这里直接写到循环外面。
使用的函数是
void digitalWrite (int pin, int value)
这个函数的参数和上面的一样,只不过要说一下value,这个就是电平值
| 值 | 说明 |
|---|---|
| 1 | 高电平 |
| 0 | 低电平 |
然后添加进去
#include <wiringPi.h>
#include <stdio.h>
int main(){
wiringPiSetup(); // 记得初始化
pinMode(16, OUTPUT);
digitalWrite(16, 0);
return 0;
}
写完后我们就可以执行一下这个代码了。
4.执行代码
这里执行代码需要先进行一下编译,编译使用gcc这个工具,没有这个工具的可以下载一下
sudo apt install gcc
然后就可以开始编译了,这里不写Makefile文件,直接用命令进行编译,命令如下:
gcc -o 编译出来的文件名 需要编译的文件.c -lwiringPi
这里如果不写-o和编译出来的文件名,编译出来的可执行文件是a.out。
需要注意一下,最后的-lwiringPi是必须要加上的,如果不加上就会出现下面的问题

这个就像你用pthread线程一样,在编译的时候不加-pthread,所以需要加上。
编译完成后如果没有出问题就可以用
./a.out
来执行了。
如果你用-o来规定了

可以使用
./别名
来运行,我这是openLED,所以是
./openLED
执行了LED灯就会亮了。
最后
学会了如何操作gpio后就可以控制一些传感器或者元器件了,所以先得把gpio的操作学好就可以控制一些复杂的东西了,后面香橙派还有很多功能我还没有研究完成,等需要用到什么就使用什么即可。
下一章我会介绍一下输入模式,毕竟在读传感器的时候不能只输出,还得输入呢

 浙公网安备 33010602011771号
浙公网安备 33010602011771号