

Image as Set of Points, ICLR2023 论文解读
 Context Cluster Block 结构分析
Context Cluster Block 结构分析
Image as Set of Points#
3. METHOD#
Context Clusters 放弃了流行的卷积或注意力,转而采用新颖的经典算法聚类来表示视觉学习。在本节中,我们首先描述上下文集群管道。然后彻底解释了所提出的用于特征提取的上下文聚类操作(如图 2 所示)。之后,我们设置了 Context Cluster 架构。最后,一些公开的讨论可能会帮助个人理解我们的工作并在我们的 Context Cluster 之后探索更多方向。
3.1 Context Clusters Pipline#
From Image to Set of Points
给定输入图像 ,我们首先使用每个像素 的二维坐标增强图像,其中每个像素的坐标表示为 。研究进一步的位置增强技术以潜在地提高性能是可行的。前面这种设计考虑到它的简单性和实用性。然后将增强图像转换为点(即像素)的集合 ,其中 是点的数量,每个点都包含特征(颜色)和位置(坐标)信息;因此,点集可能是无序和无组织的。(为啥要做这个?)
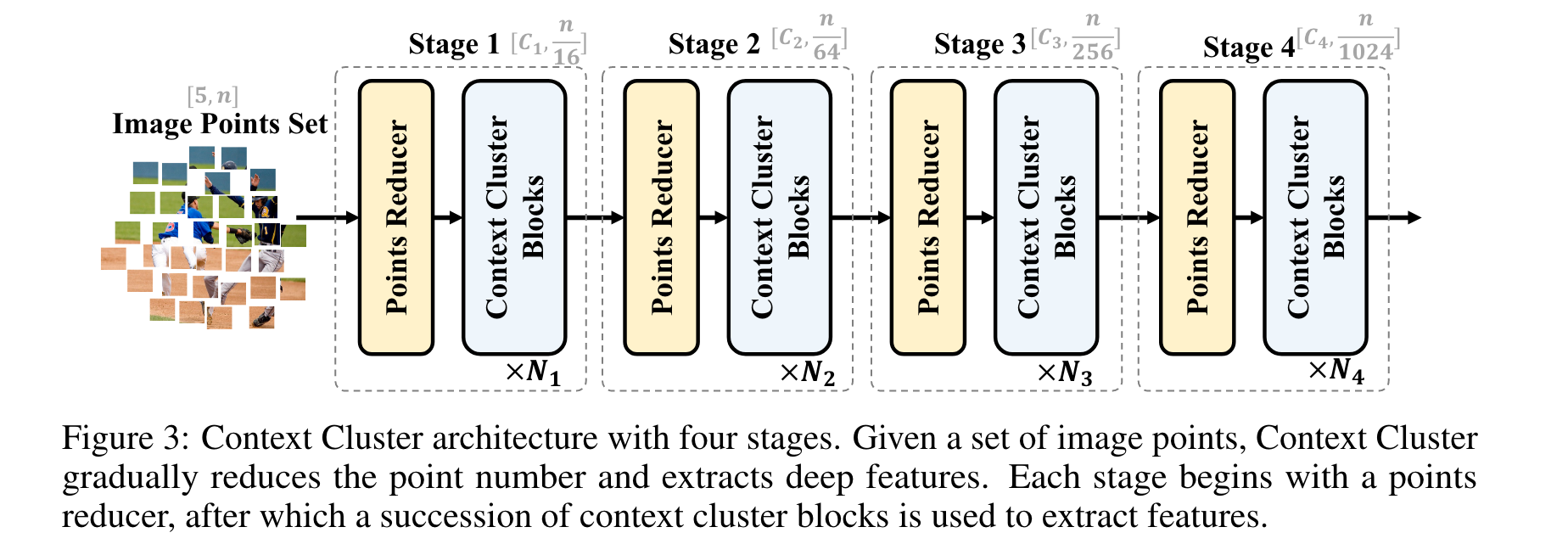
图 3:具有四个阶段的 Context Cluster 架构。给定一组图像点,Context Cluster 逐渐减少点数并提取深层特征。每个阶段都先过一个点缩减器,然后使用一系列 CoCs 来提取特征。
通过提供一个理解图像的全新视角,也就是图像点,我们获得了惊人的泛化能力。一组数据点可以被视为通用数据表示,因为大多数领域的数据可以作为特征和位置信息的组合(或两者之一)来给出。这启发我们将图像概念化为一组点。(和点云形式类似?)
Feature Extraction with Image Set Points (讲特征提取的架构)
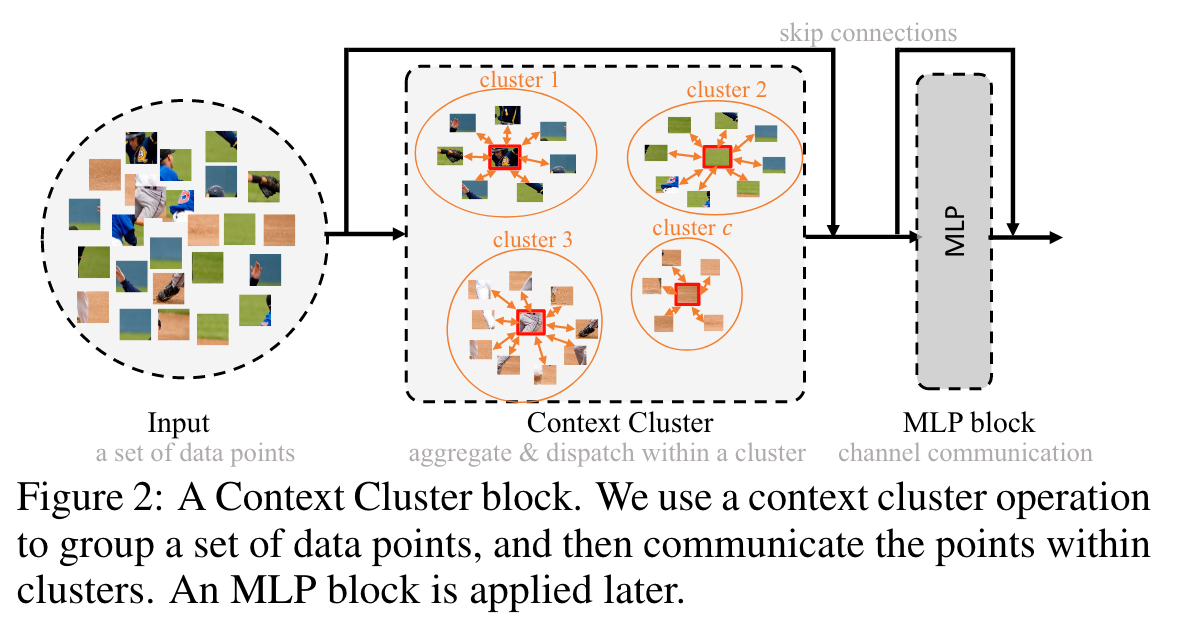
按照 ConvNets 方法,我们使用 CoCs 块(参见图 2 以供参考,参见第 3.2 节以进行解释)分层提取深层特征。图 3 显示了我们的 CoCs 架构。给定一组点 ,我们首先减少点数以提高计算效率,然后应用一系列 CoCs 块来提取特征。为了减少点数,我们在空间中均匀地选择(什么是均匀选择,更具体的,或者代码的表述?实际上,就是平分,可以参考后面的 class PointReducer)一些锚点,最近的 k 个点通过线性投影连接和融合。请注意,如果所有点都按顺序排列并且 k 设置正确(即 4 和 9),则可以通过卷积运算来实现这种降采样,就像在 ViT 中一样(Dosovitskiy 等人,2020)。为了清楚前面所述的中心和锚点(如何选择),我们强烈建议读者查看附录B。
附录B 解读:关于 CoCs 中心和锚点的解释
人们可能会对如何在我们的 point reducer 块中指定锚点和在我们的 CoCs 块中指定聚类中心感到困惑。我们在本节中提供了对它们的说明性和详尽的解释。
对于锚点和中心,它们在空间中均匀生成。为了更好地说明这一点,我们在下图中绘制了组织好的图像点。
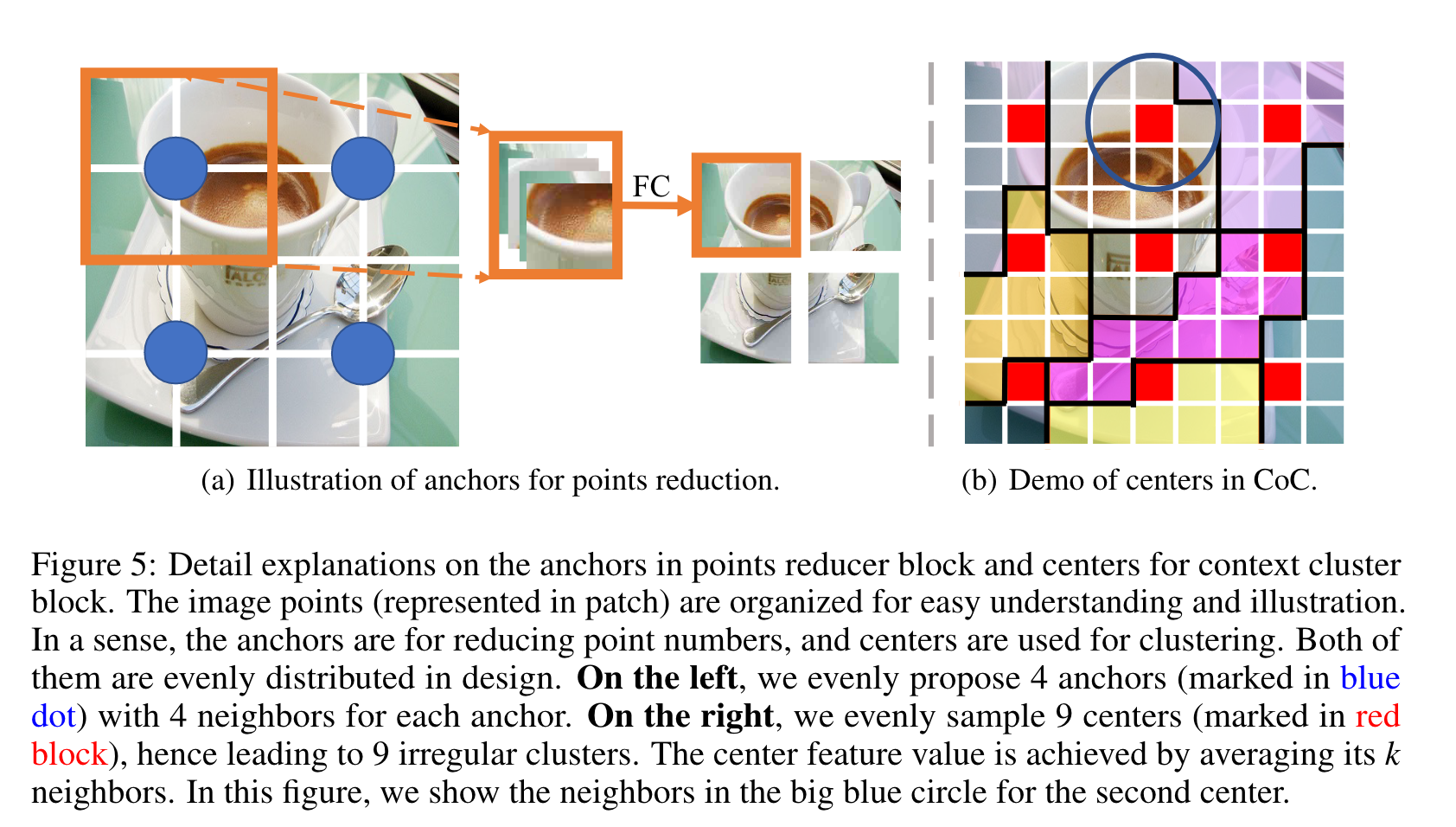
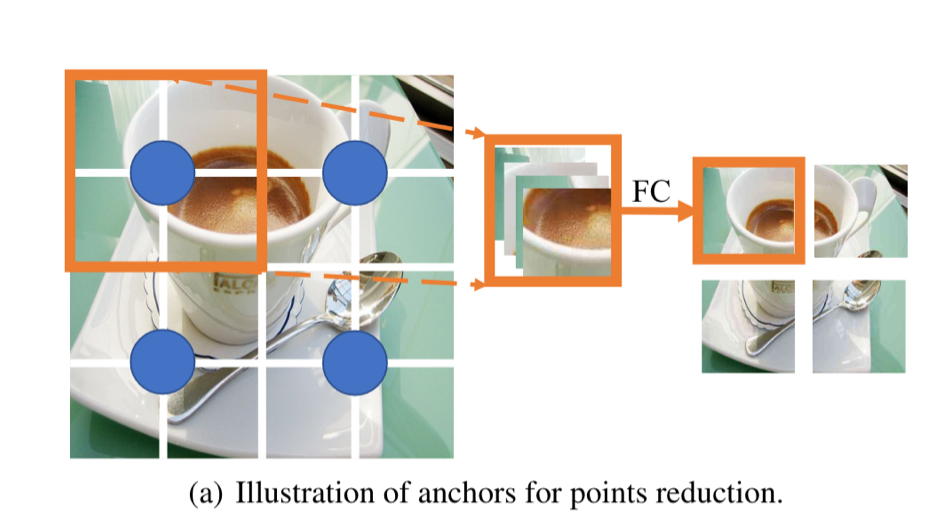
图像点(以小块表示)被组织(规整)起来以便于理解和说明。锚(anchors)是为了减少点数,而中心(centers)是用来聚类的。两者被设计为均匀分布。在左侧,我们均匀地提出 4 个锚点(用蓝点标记),每个锚点有 4 个邻居(可能是使用网格的坐标来计算距离)。在右侧,我们均匀地采样 9 个中心(以红色块标记),因此导致 9 个不规则簇。(具体是如何聚类的,如何度量距离,看后面 3.2)中心特征值是通过平均它的 k 个邻居来获得的。在此图中,我们在第二个中心的蓝色大圆圈中显示了邻居。
如左图,我们展示了16个图像块(点),和4个被设置的锚点,用于进行下采样,每个锚点都考虑它最近的 个邻居。然后,他们全部按 通道 维串联起来,然后通过 来降低维数并融合信息。在减少点的数量后,我们得到一个新的点集,该点集的数量和设置的锚点的数量相同。
右图中,我们展示了9个中心块,也就是红色的块以及对应的9个簇。其中,生成中心的特征由 个邻居的平均给出,例如图中第二个红色点的特征由蓝色圆圈中9个点来进行平均。
聚类时的邻居的数量可以是任何数值。我们将其设定为 或 (整数的幂),原因有三:
- 首先,我们遵循 ConvNets 和 pyramid ViTs 的设计,以确保点的集合可以被重组为一个矩形的特征图。
- 其次,这种策略通过采用卷积或池化操作(前文说了)可以简化我们的代码(就是方便写 KNN)。
- 最后,大多数检测和分割方法都需要一个矩形的特征图。(这里其实不理解,但是实际上可能是恰当的 方便后面做上采样)。
附录看完后,还是有一点问题,没有理解它是如何聚类的,用什么进行度量。|在后文 3.2 中提到
Task-Specific Applications.
对于分类,我们对最后一个块输出的所有点进行一个池化(平均),并使用 FC 层进行分类。
对于检测和分割等下游密集预测任务,我们需要在每个阶段后按位置重新排列输出点,以满足大多数检测和分割头的需求(例如 Mask-RCNN)。换句话说,Context Cluster 在分类任务中提供了显著的灵活性,但限于密集预测任务的要求和我们的模型配置之间的妥协。我们希望创新的检测和分割头(如DETR(Carion等人,2020))能与我们的方法无缝整合。
3.2 Context Cluster Operation#
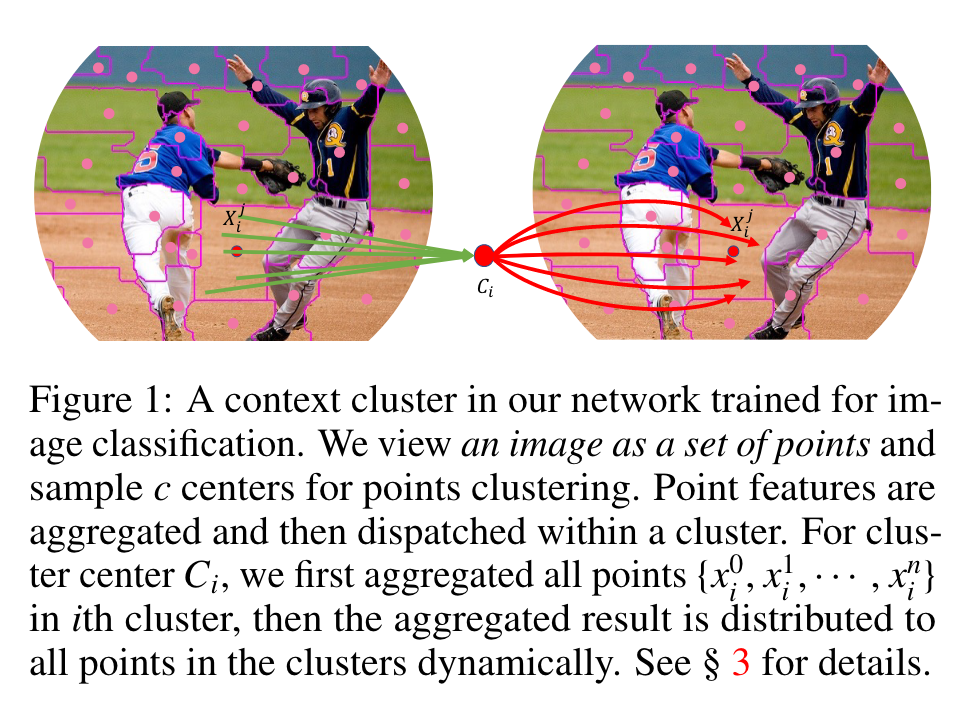
在本小节中,我们将介绍我们工作中的关键贡献,Context Cluster 操作。整体上,我们首先将特征点分组为簇;然后,每个簇中的特征点将被聚合,然后 dispatched 回来,如图 1 所示。
Context Clustering 给定一组特征点 ,我们根据相似性将所有点分为几组,每个点单独分配给一个簇。我们首先将 P 线性投影(理解成 可以)到 以进行相似度计算。遵循传统的 SuperPixel 方法 SLIC ,我们在空间中均匀地提出 个中心,中心特征是通过对其 个最近点求平均来计算的。然后我们计算 和中心点集之间的余弦相似度矩阵 。由于每个点都包含特征和位置信息,在计算相似度时,我们隐式地突出了点的距离(局部性)以及特征相似度(没搞懂)。之后,我们将每个点分配到最相似的中心,从而产生 个簇。值得注意的是,每个集群可能有不同数量的点。在极端情况下,一些集群可能有零点,在这种情况下它们是冗余的。
Feature Aggregating 我们根据与中心点的相似性,动态地聚合一个聚类中的所有点。假设一个簇包含 个点( 中的一个子集), 个点和中心点的相似度为 ( 中的一个子集),我们将这些点映射到一个值空间(怎么映射的?如何确定 ),得到 ,其中 是值空间的维度。我们也像聚类中心的一样在值空间中提出一个中心 。聚合的特征 由以下方式给出:
-
这里 和 是可学习的标量, 用于缩放和移动。
-
是 Sigmoid 函数, 用于重新缩放相似度到 。 为什么不用
Softmax呢? [1] -
表示 中的第 个点。
从经验上看, 这种策略比直接应用原始相似度的结果要好得多, 因为不涉及负值。我们将价值中心 纳入公式用于数值稳定性[2] 以及进一步强调局部性。为了控制幅度,引入特征因子 进行归一化。
Feature Dispatching 然后,聚合的特征 根据相似性自适应地分配到聚类中的每个点。通过这样做,点之间可以相互通信,并共享来自 Cluster 中所有点的特征(如图1所示)方法如下:
这里,作者遵循和式相似的做法来处理相似性,并应用一个全连接 (FC) 层来匹配特征维度 (从值空间维度 到原始维度 )。
Multi-Head Computing 考虑到 ViT 中使用的多头注意力机制,作者在上下文聚类模块中使用了类似的做法,也使用了 ℎ 个 head,且多头操作的输出由 FC 层融合,发现多头机制也使得模型效果更好。 Multi-headed Self-attention(多头自注意力)机制介绍
关键代码介绍#
class PointReducer#
官方 GitHub 居然有一个 typo (Reducer打错了),感觉可以提 PR。
class PointReducer(nn.Module):
"""
Point Reducer is implemented by a layer of conv since it is mathmatically equal.
Input: tensor in shape [B, C, H, W]
Output: tensor in shape [B, C, H/stride, W/stride]
"""
def __init__(self, patch_size=16, stride=16, padding=0,
in_chans=3, embed_dim=768, norm_layer=None):
super().__init__()
# to_2tuple(x): (x, x)
patch_size = to_2tuple(patch_size)
stride = to_2tuple(stride)
padding = to_2tuple(padding)
# proj: 投影,把分 patch 和 FC 操作合并了,所有 kernel_size = stride
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size,
stride=stride, padding=padding)
self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity()
def forward(self, x):
x = self.proj(x)
x = self.norm(x)
return
这段代码本质上是用于图像处理的自注意力机制的实现,这里用作 PointReduce,其中self.proj是一个卷积层对象,用于将图像的每个局部区域(patch)映射到一个低维的特征空间中。
具体来说,这个卷积层的输入通道数为in_chans,表示输入图像的通道数,输出通道数为embed_dim,表示每个局部区域映射到特征空间中的维度数。卷积核的大小为kernel_size,表示每个局部区域的大小,stride和padding分别表示卷积的步长和填充。
但是这里,我们实际上做的是上图的工作,所以我们把 设置为和 相同就可以直接一步实现了。
#
Softmax is not considered since the points do not contradict with one another. ↩︎
If there were no involved and no points are grouped into the cluster coincidentally, would be zero, and the network cannot be optimized. In our research, this conundrum occurs frequently. Adding a small value like does not help and would lead to the problem of vanishing gradients. ↩︎


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· AI与.NET技术实操系列(五):向量存储与相似性搜索在 .NET 中的实现
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人