

metavision预处理函数
metavision预处理函数
三种预处理函数
histo
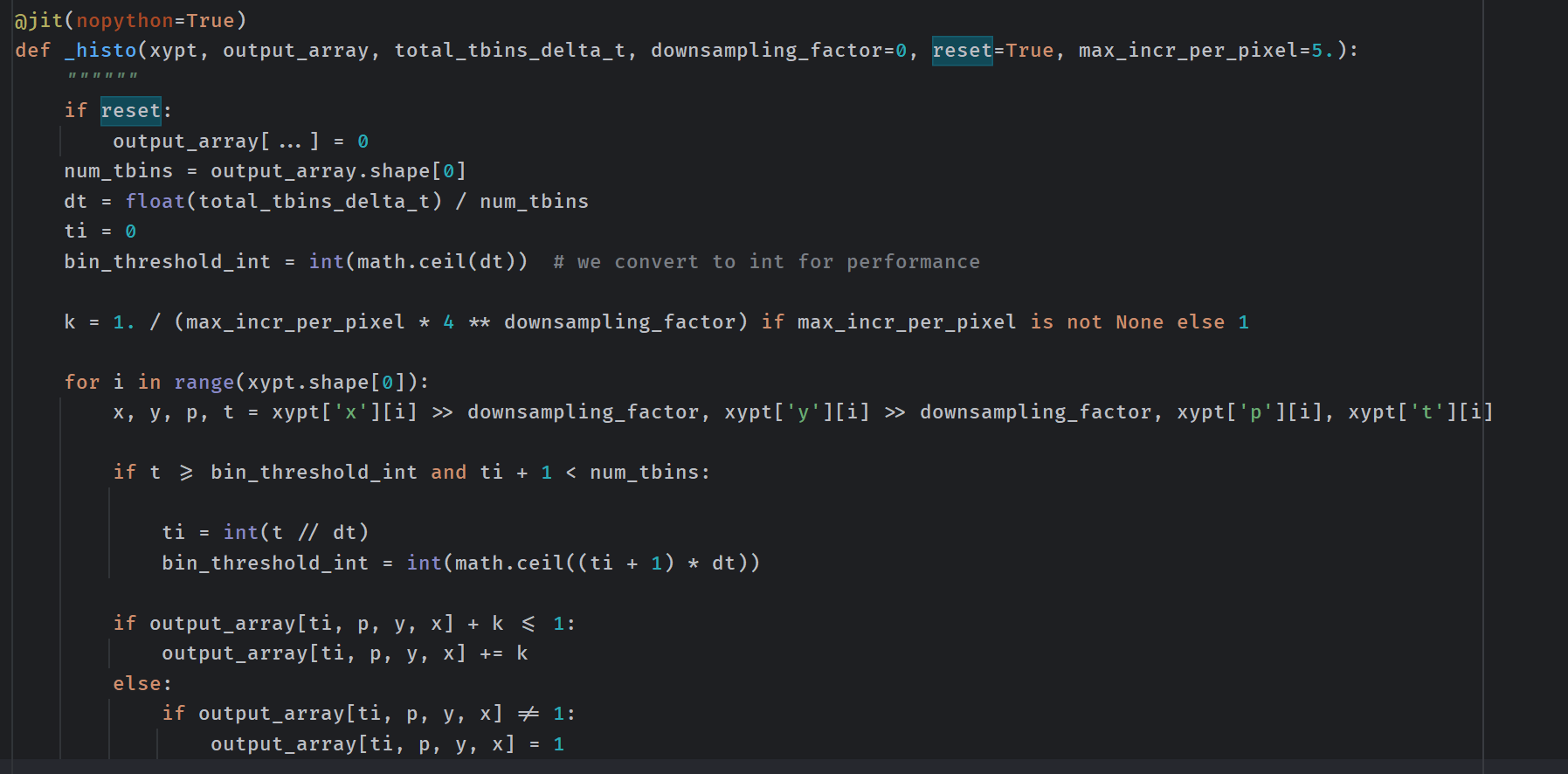
双通道
参数
-
xypt: event结构化数组(一般会分段读取,分段为delta_t) -
output_array: 输出保存数组(reset参数可以直接重置归0)一般output_array为(tbins, 2, height, width)
-
total_bins_delta_t: \(\Delta t\),分段时间长度,是加载时的delta_t -
max_incr_per_pixel: 用于限制数据点值的增加量 -
downsampling_factor: 降采样因子
输出(tbins, 2, height, width)中的2分别是 负极和正极 的k累计值(\(k*极变化次数\))
其中k是固定的,\(k*极变化次数 \leq 1\)
函数解释
这其中的$\Delta$是分段读取的时间长度
value仅和max_incr_per_pixel与downsampling_factor有关,与时间无关
diff函数
viz_histo可视化函数
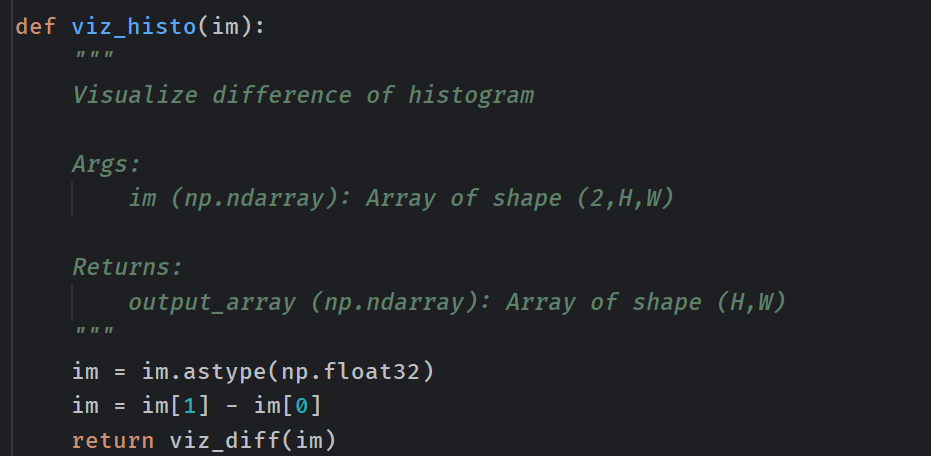
输入是形为(2, H, W)的np array
得到的是 正极-负极 k累计和 的可视图,颜色越深代表该像素 正极-负极k累计和 越大(段时间),越浅代表越小
viz_diff可视化函数
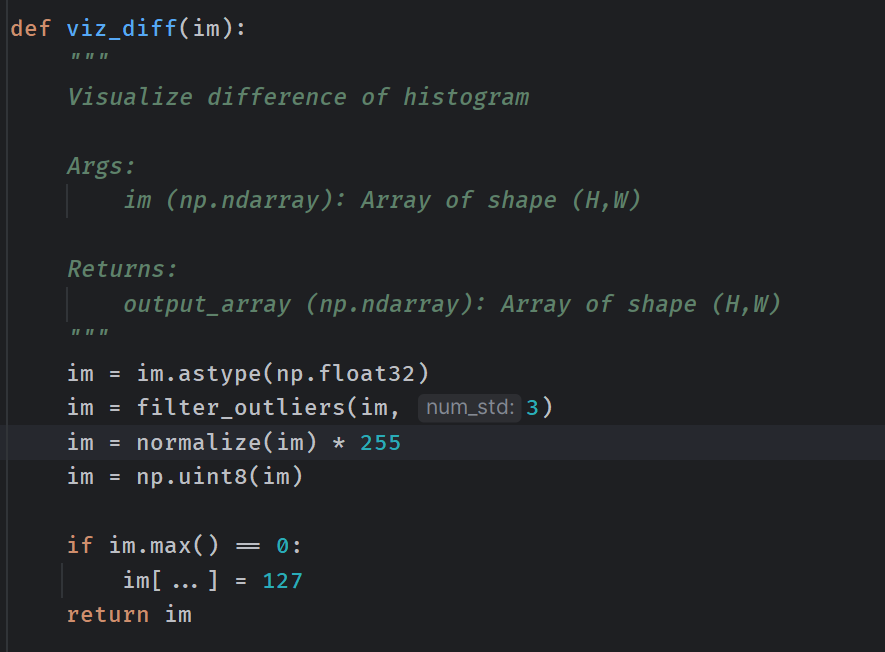
输入是形为(H, W)的np array
diff
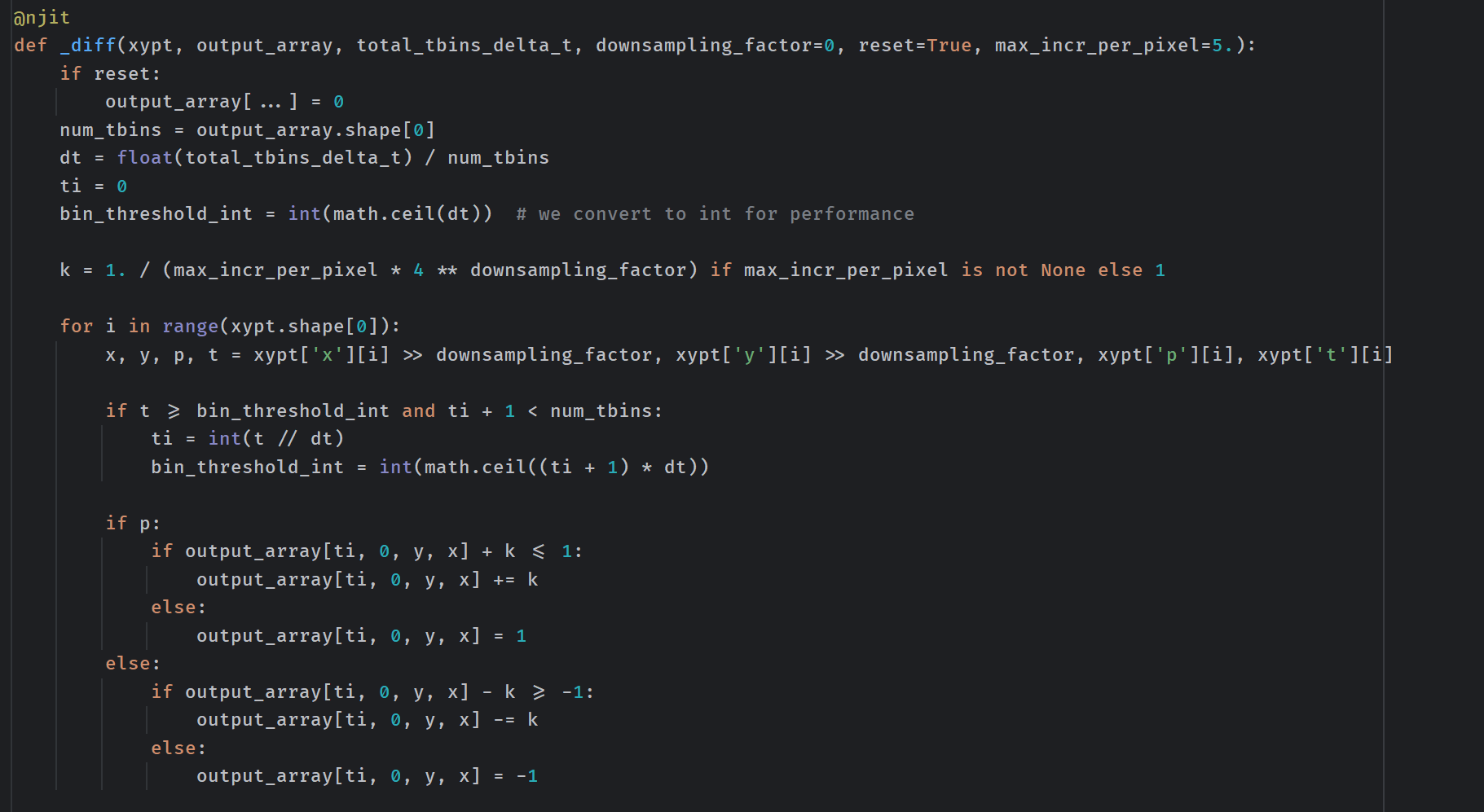
单通道
与极性相关,正极+k,负极-k,得到的是 正极+负极 的k累计值
timesurface
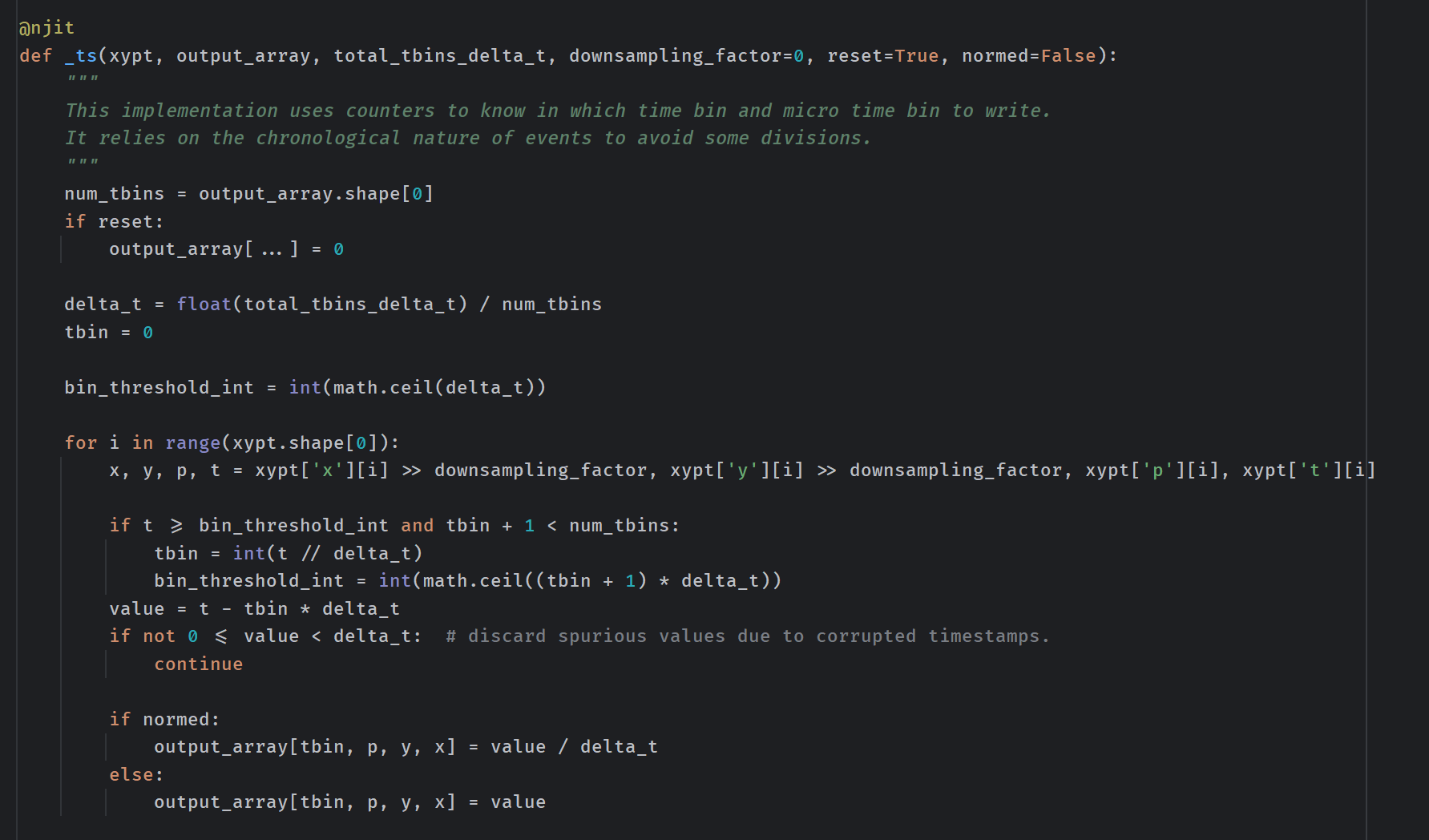
value是bin内相对时间,一个bin内时间越后,value越大
函数解释
输出(tbins, 2, height, width)中的2分别是 负极和正极 的value
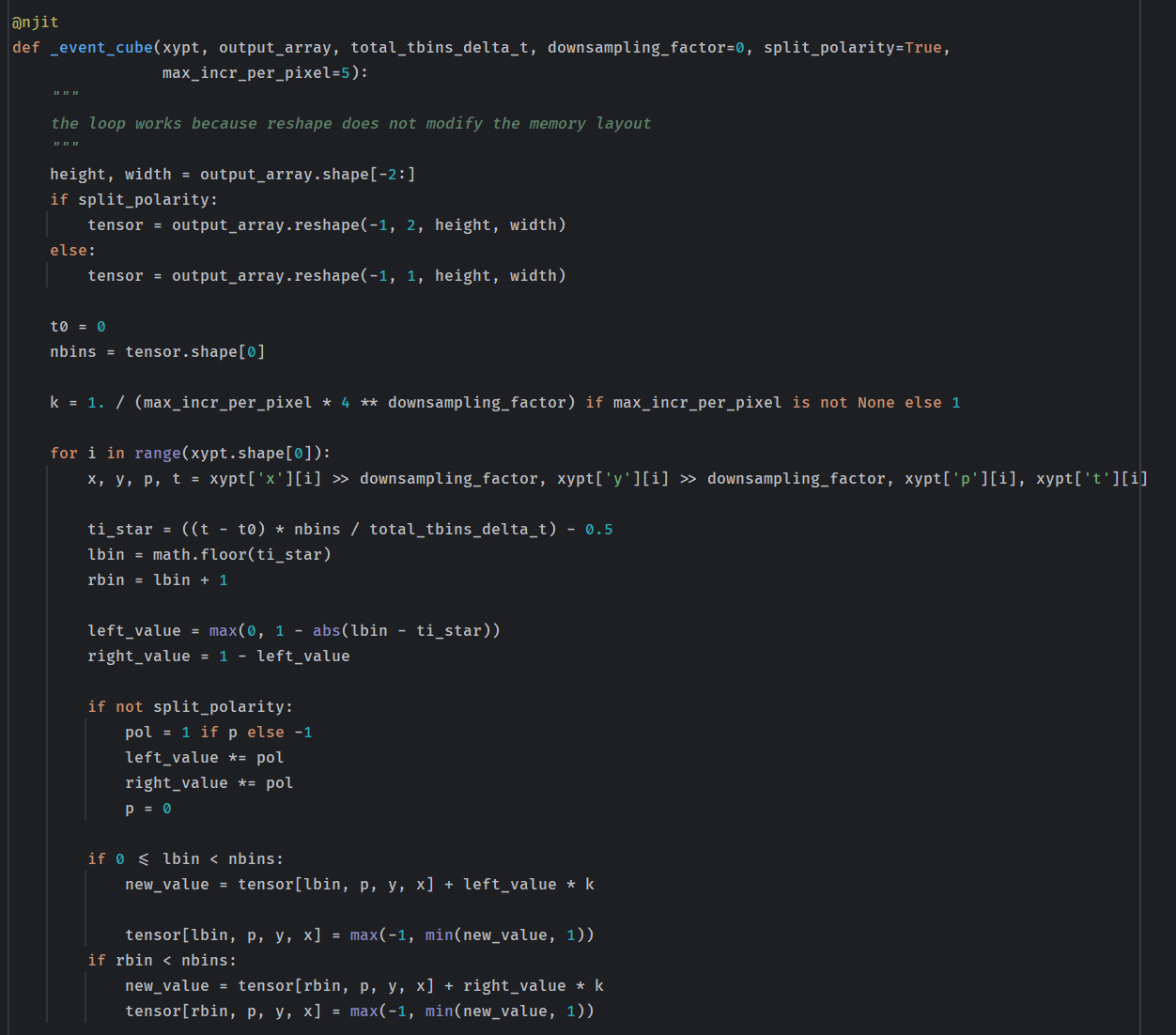
Event Cube
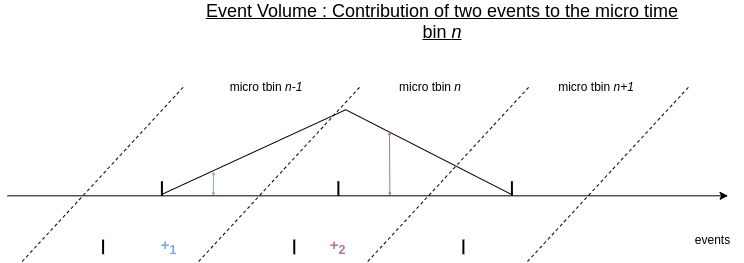
从本质上讲,事件立方算法是将每个事件的值分配到两个最近的时间箱内。
参数
output_array: 形为(num_tbins,num_utbins*2,H,W)
num_utbins为微时间箱数量(时间箱的进一步划分,会自适应参数split_polarity)
split_polarity: 是否划分极
viz_event_cube_rgb可视化函数
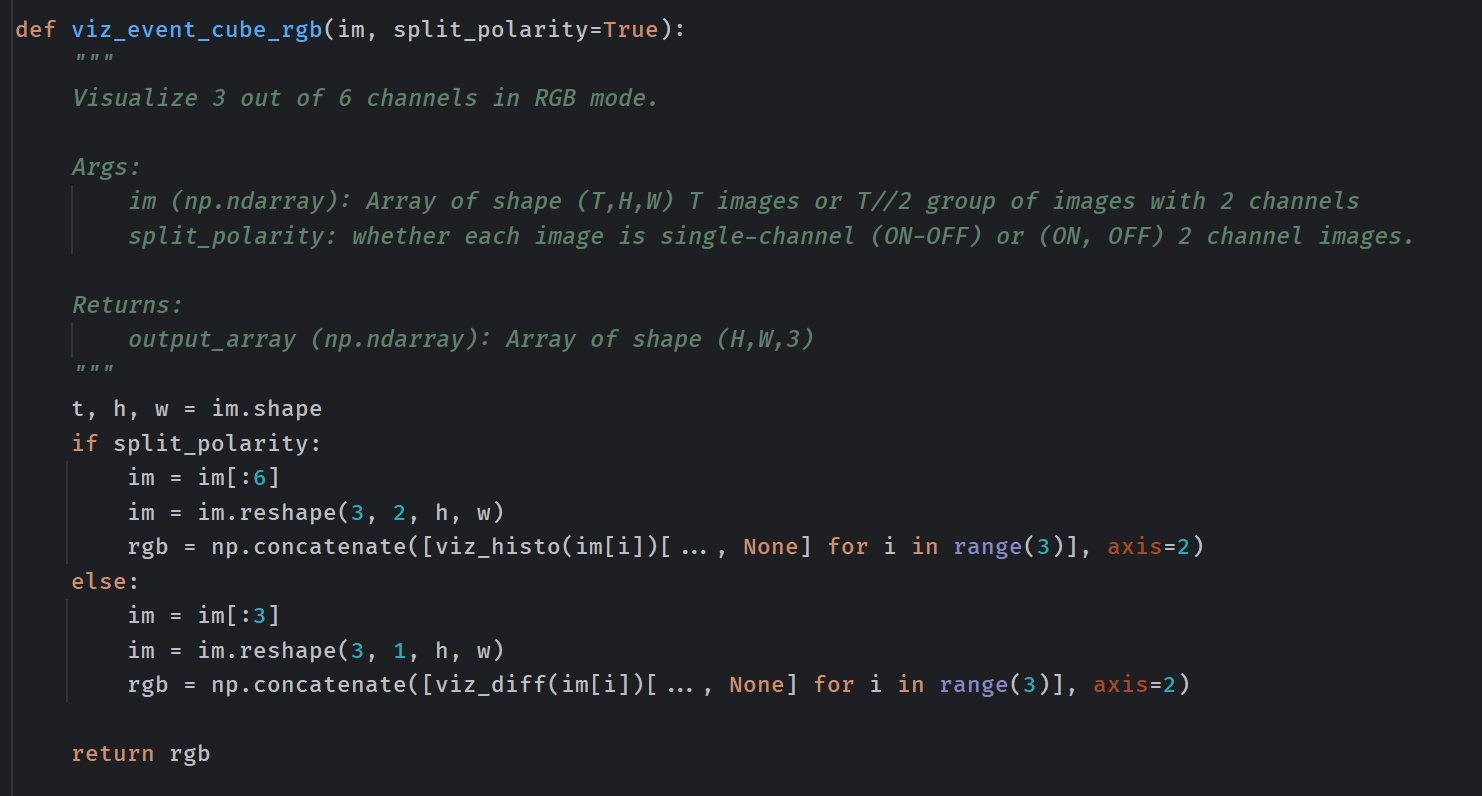
取3个rgb块,如果split_polarity=True,取前6个时间箱重塑成(3, 2, ...),调用viz_histo;如果为split_polarity=False,取前3个时间箱重塑成(3, 1, ...),调用viz_diff,塑成rgb。
