vivado(测试一)PS端通过串口输出helloword
创建工程:
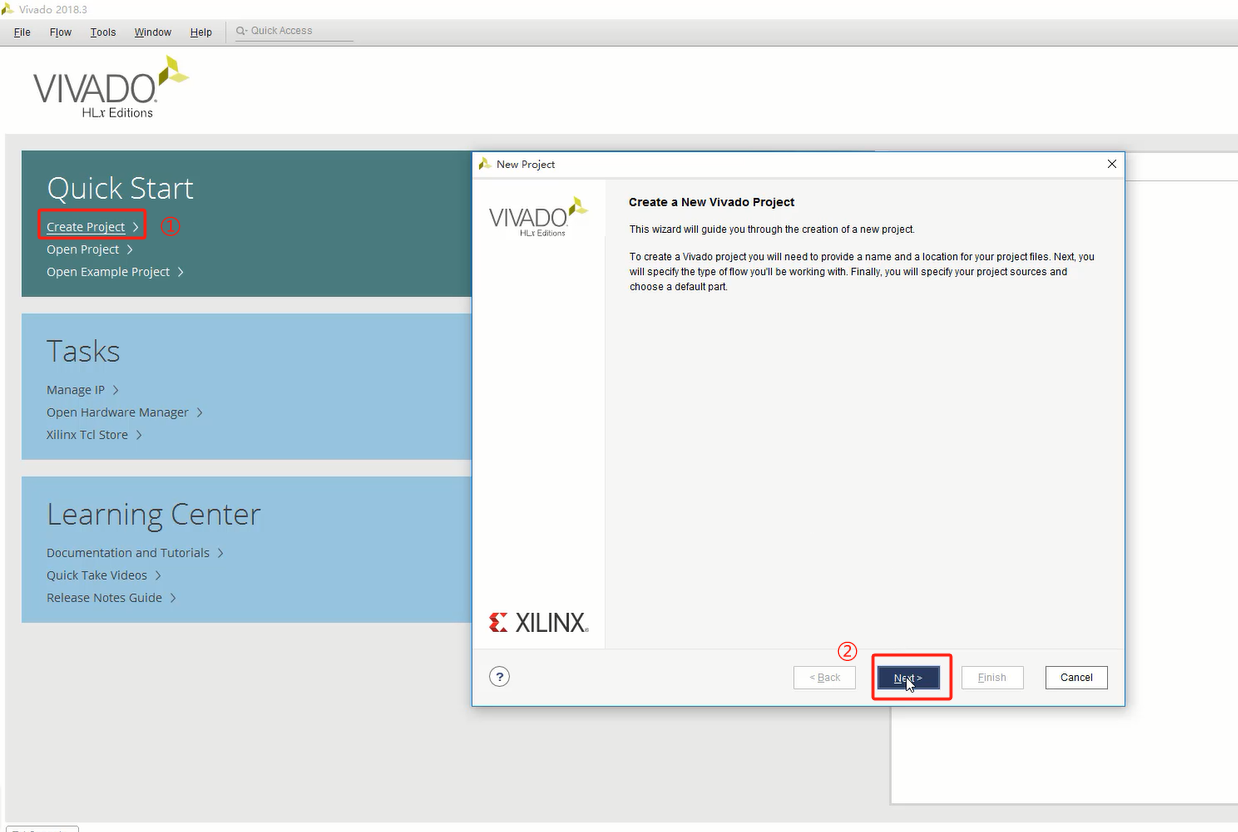
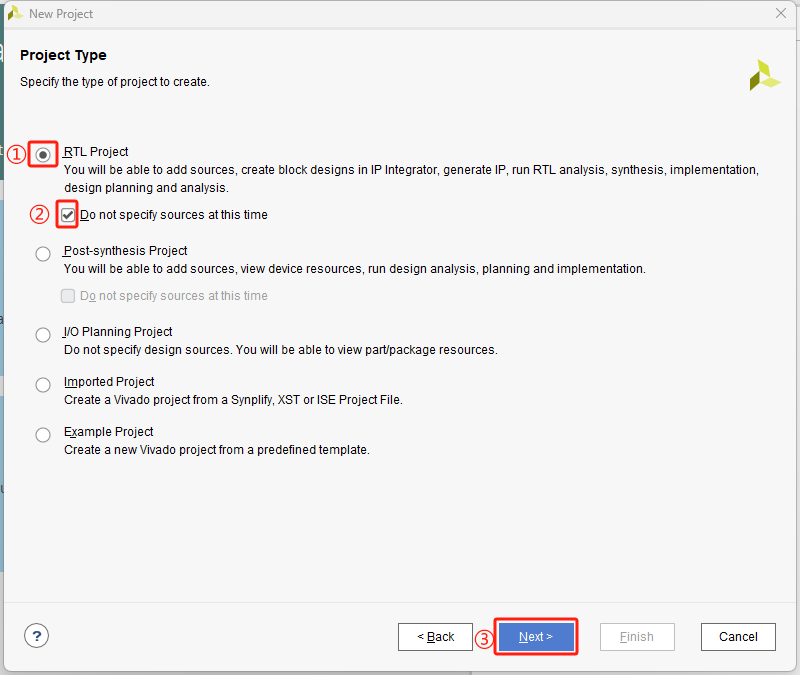
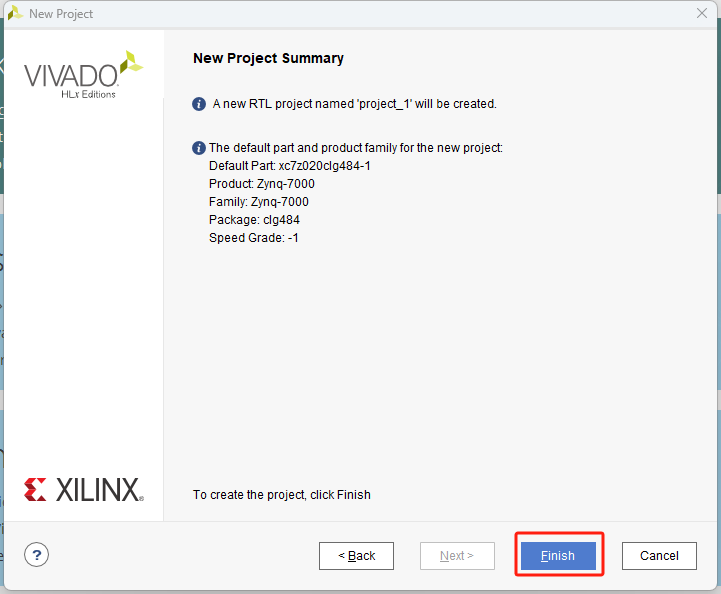
创建一个RTL工程:
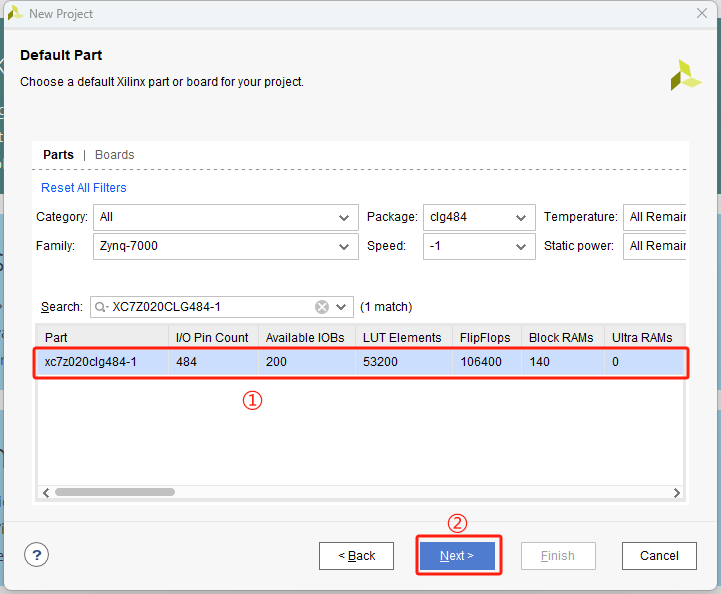
选择器件:
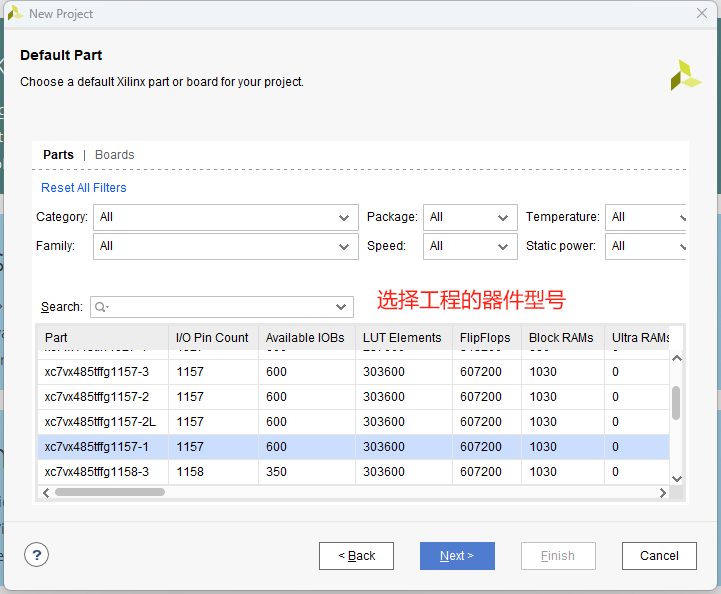
而我用的zedboard的SOC型号:XC7Z020CLG484-1
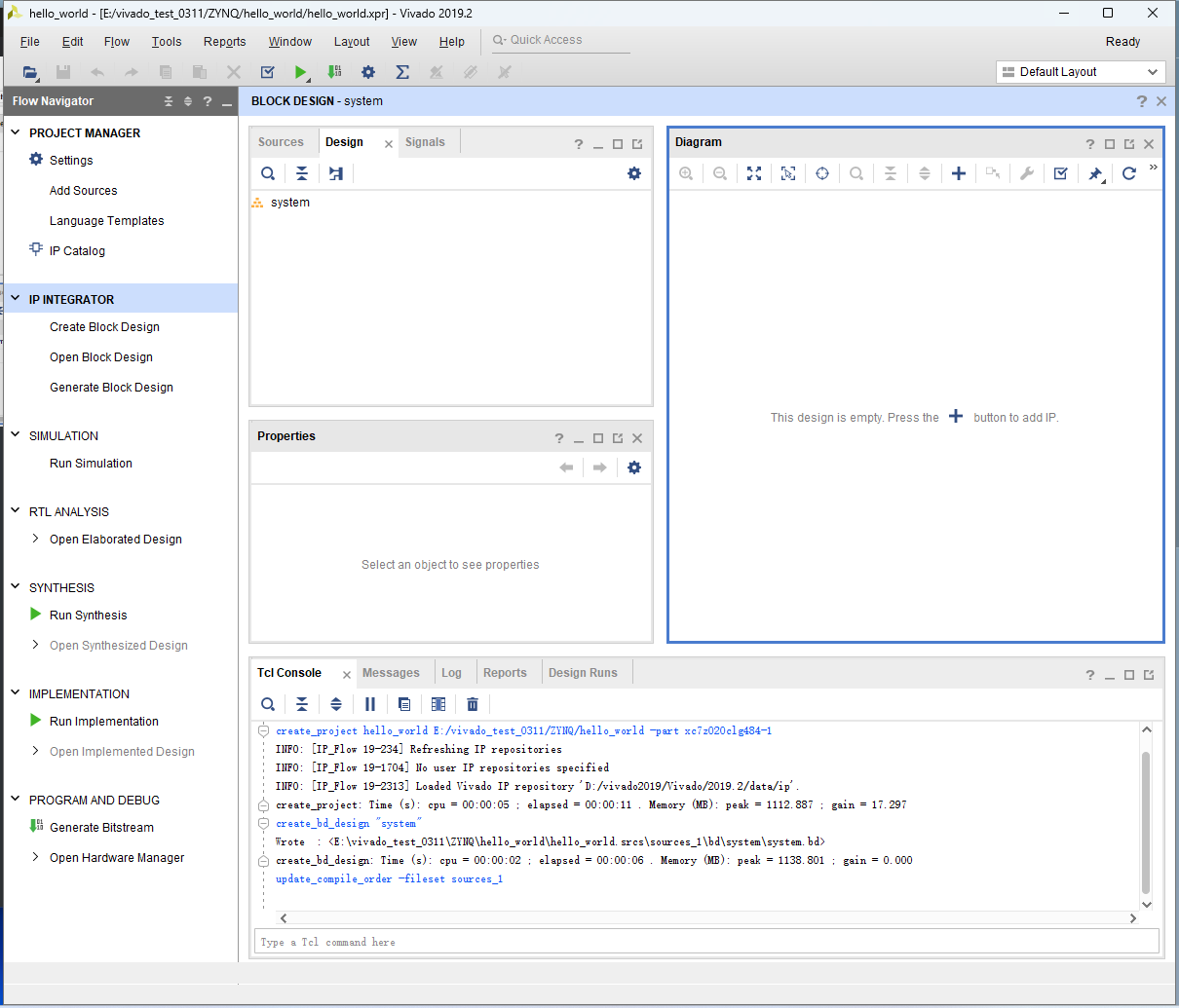
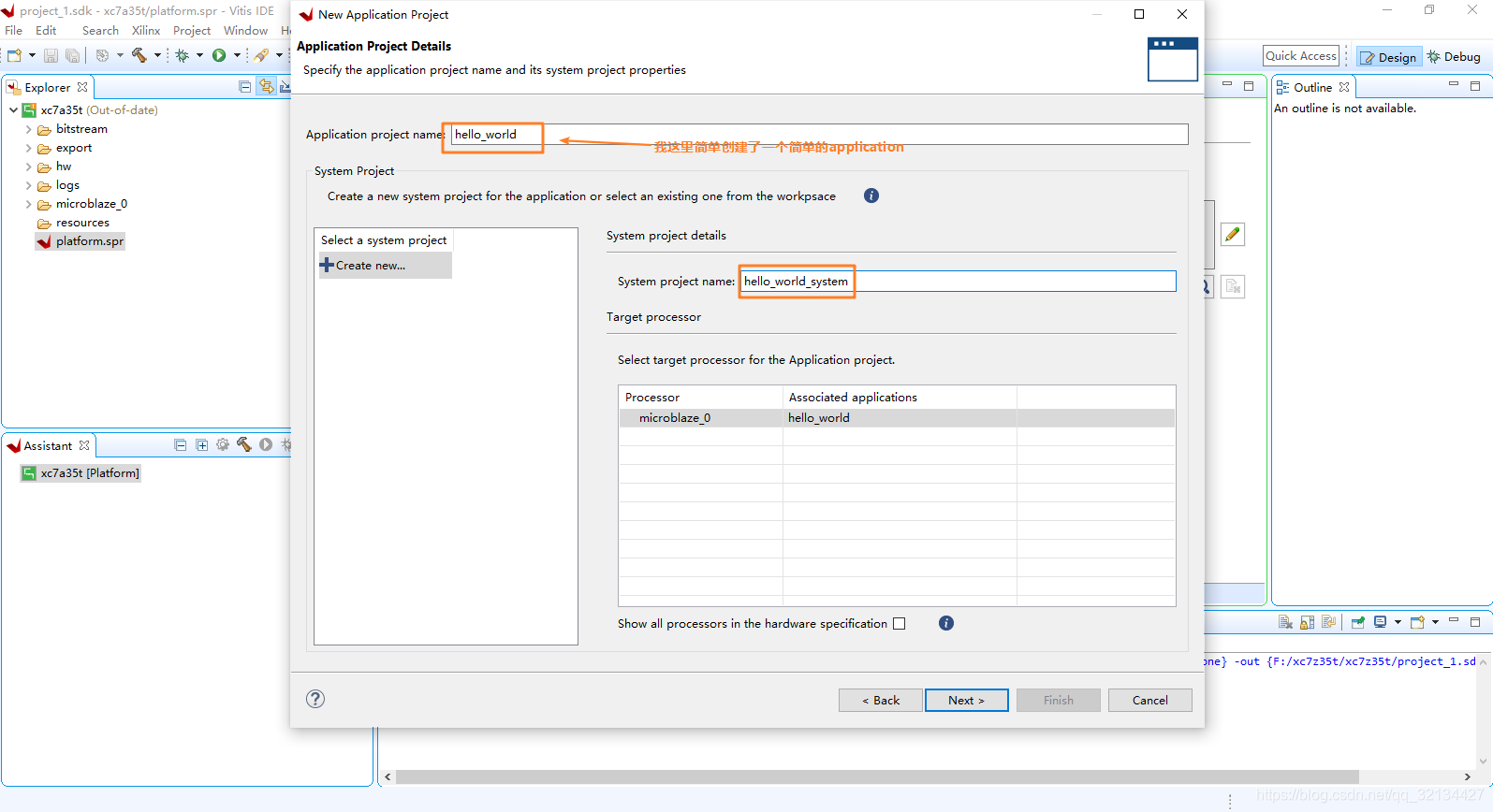
创建PS工程:
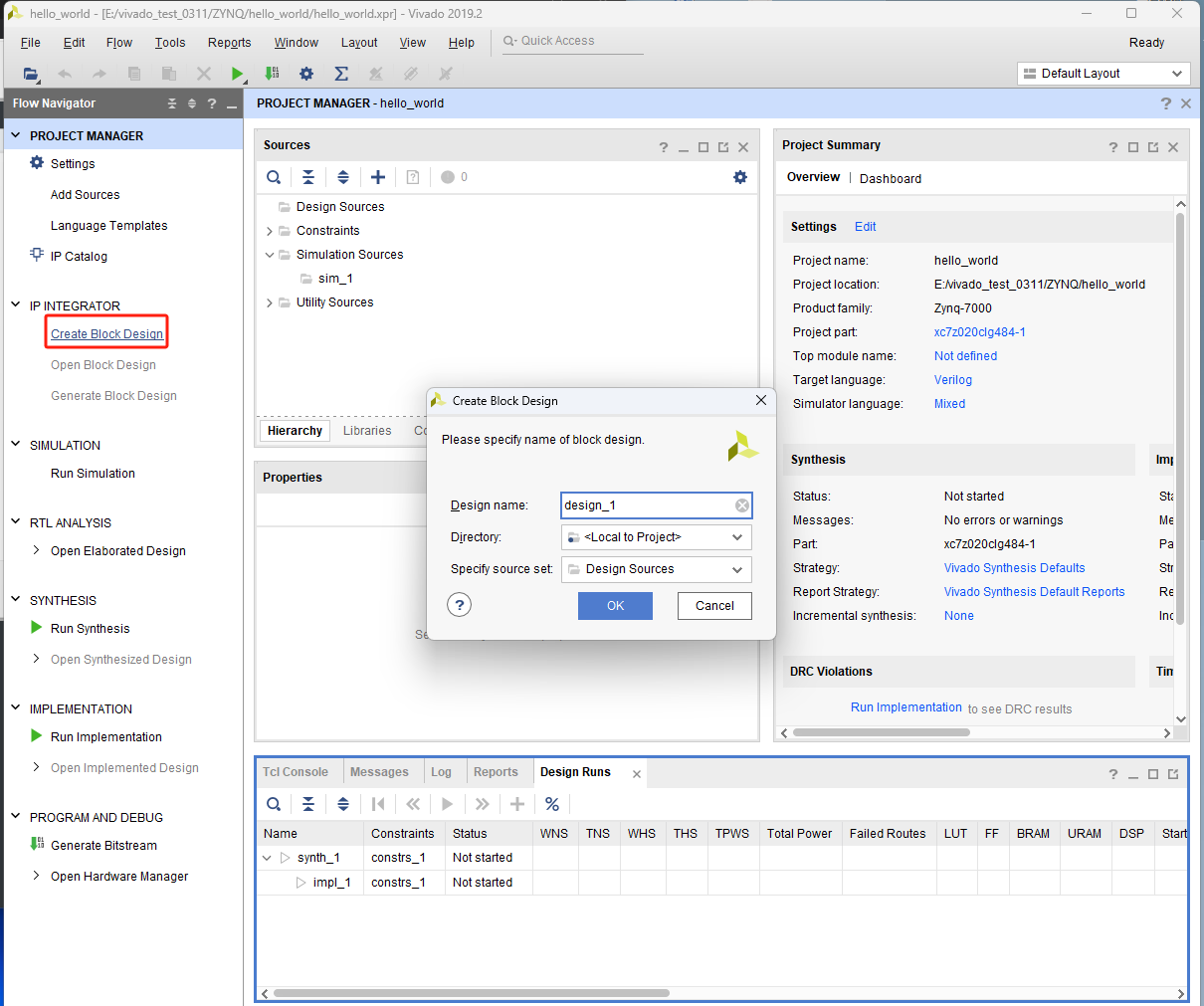
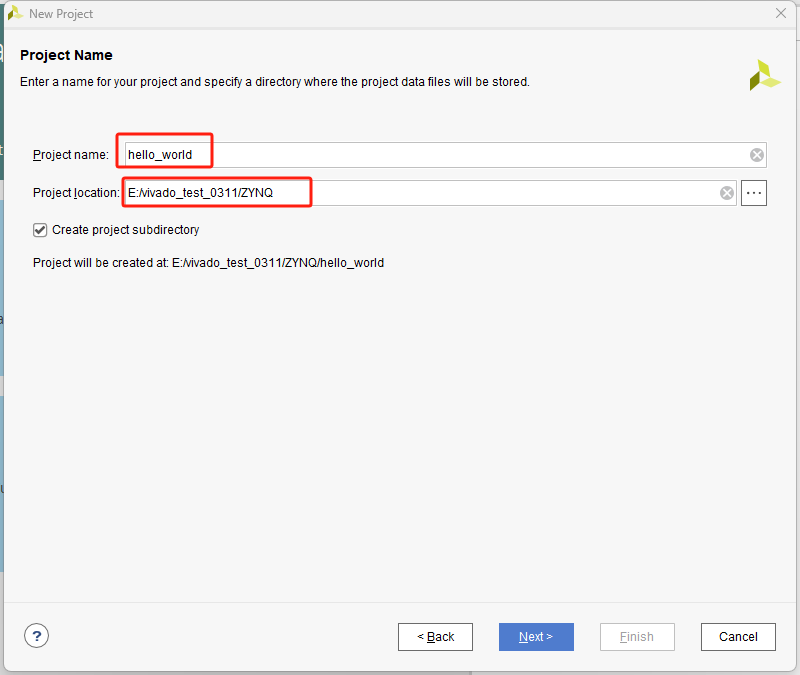
第1步:对设计进行命名:
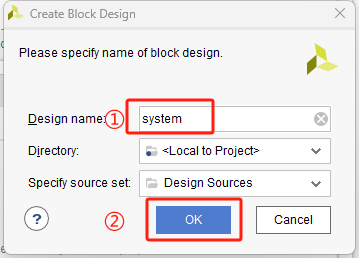
等待一会后出现如下的界面:
第2步:选择sources
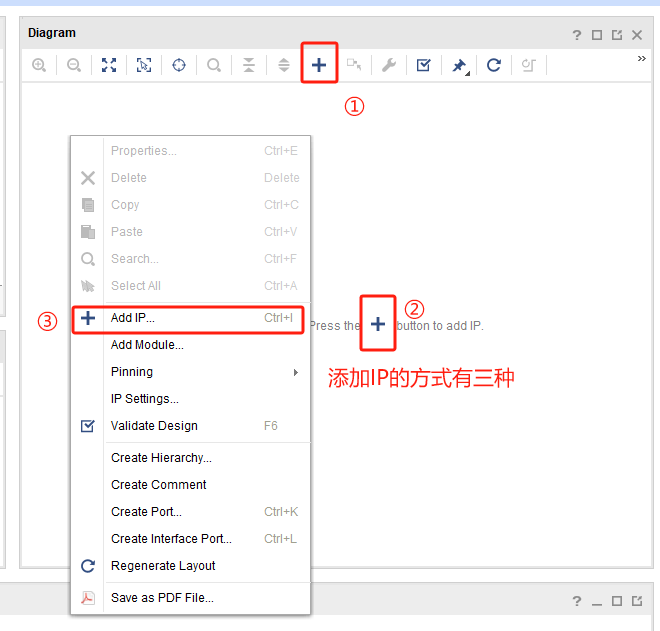
第3步:添加IP:
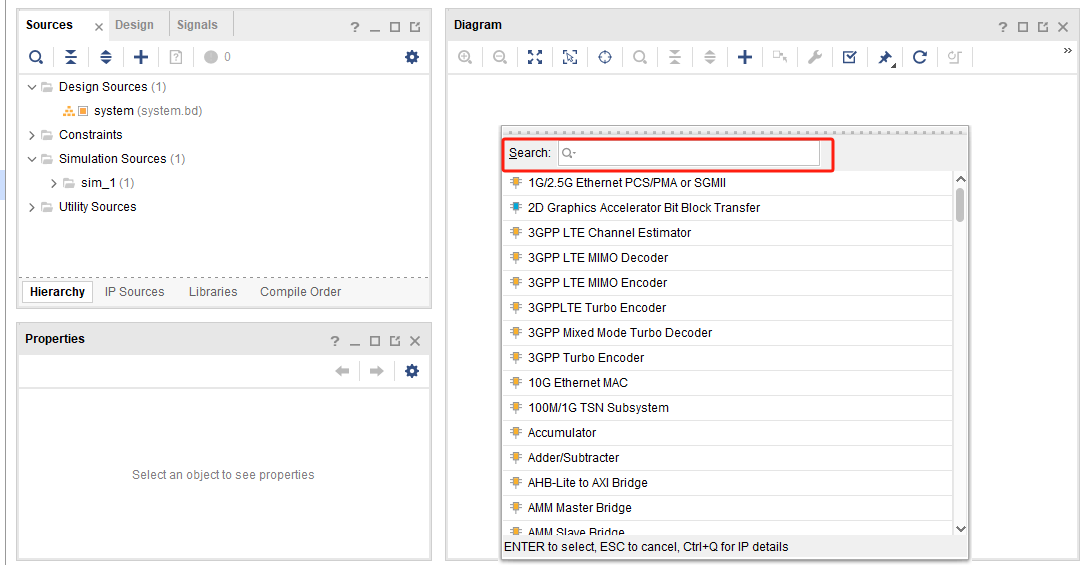
第4步:搜索ZYNQ的PS部分的IP核:
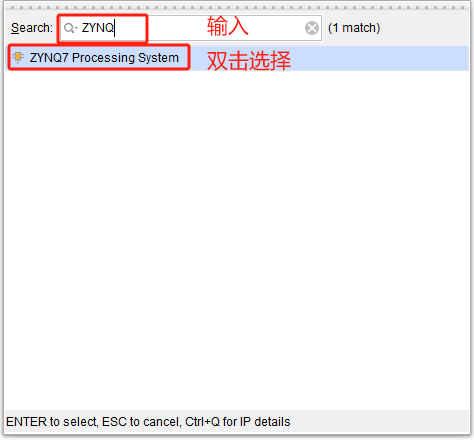
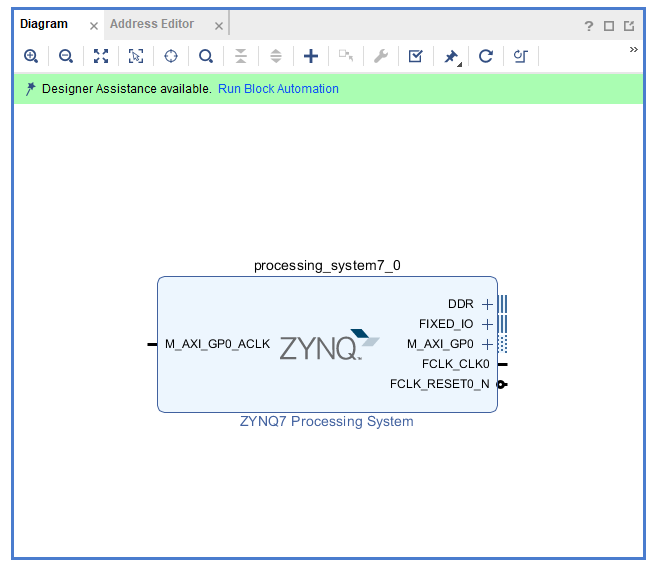
等待一段时间后
此界面的放缩方法:
①Ctrl+鼠标滚轮
②左键按住从左上角框选到右下角
③左键按住 朝着 左上、右上、左下 分别对应一种界面放缩模式。
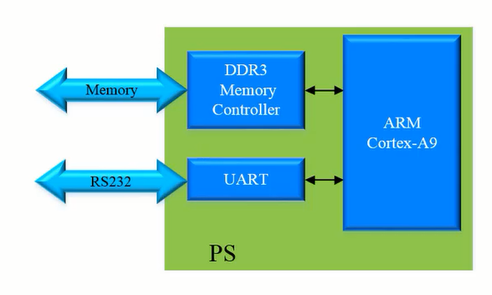
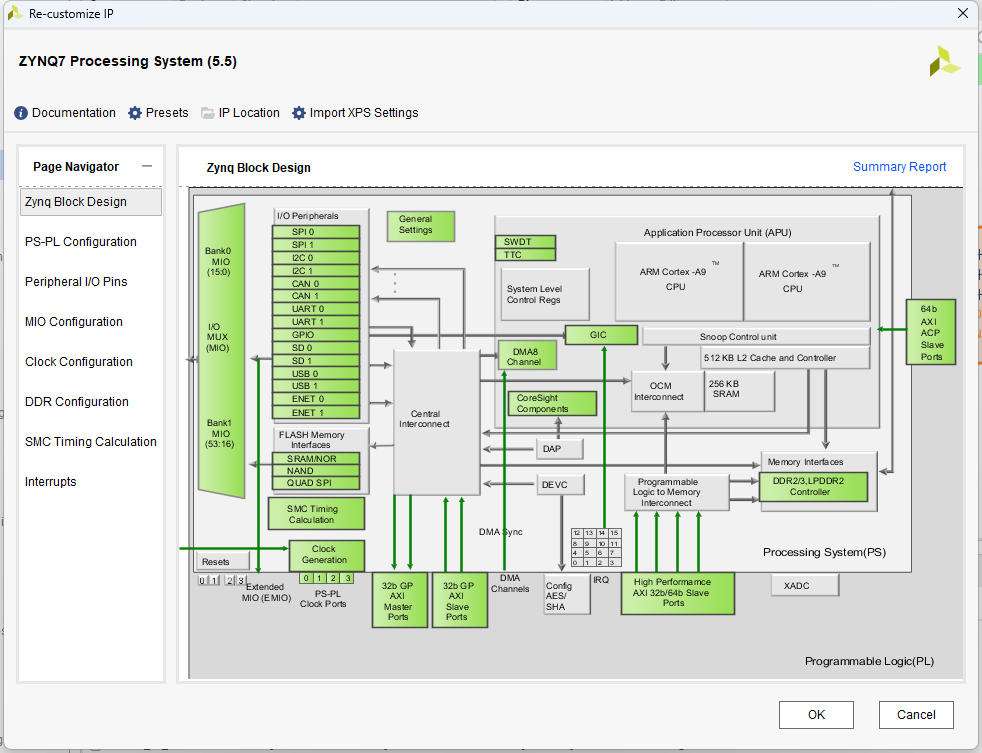
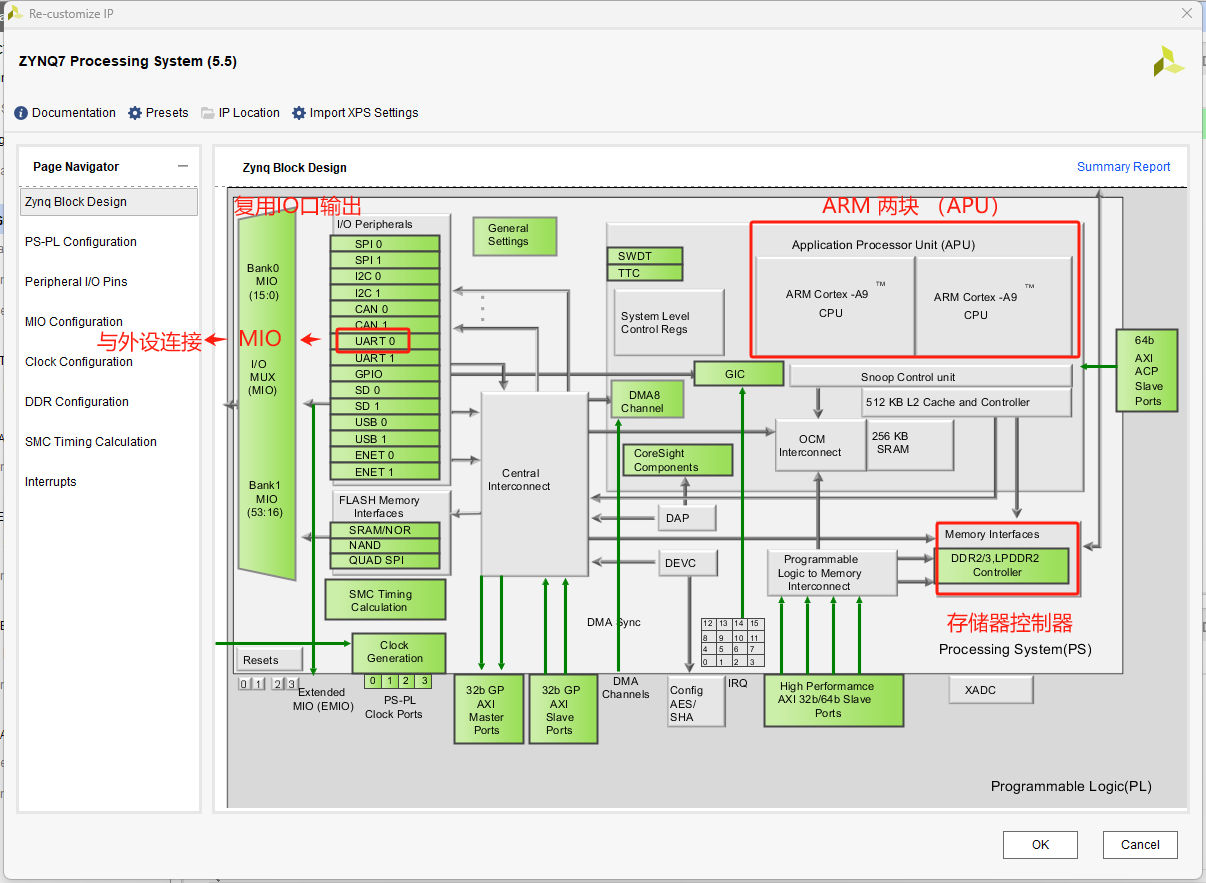
ZYNQ的嵌入式最小系统:
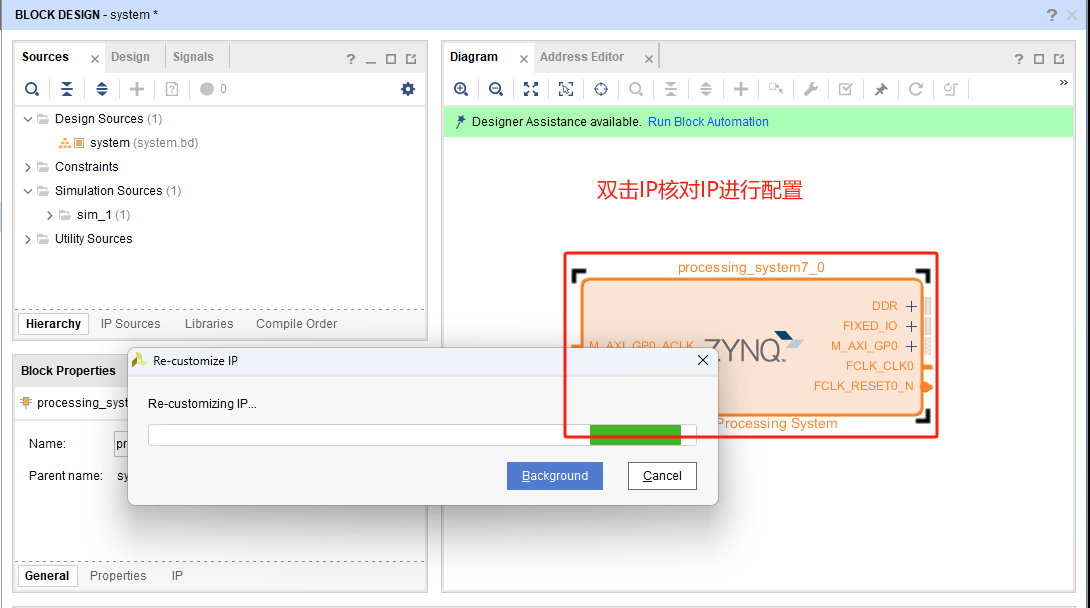
双击PS模块,进入PS模块的配置界面。
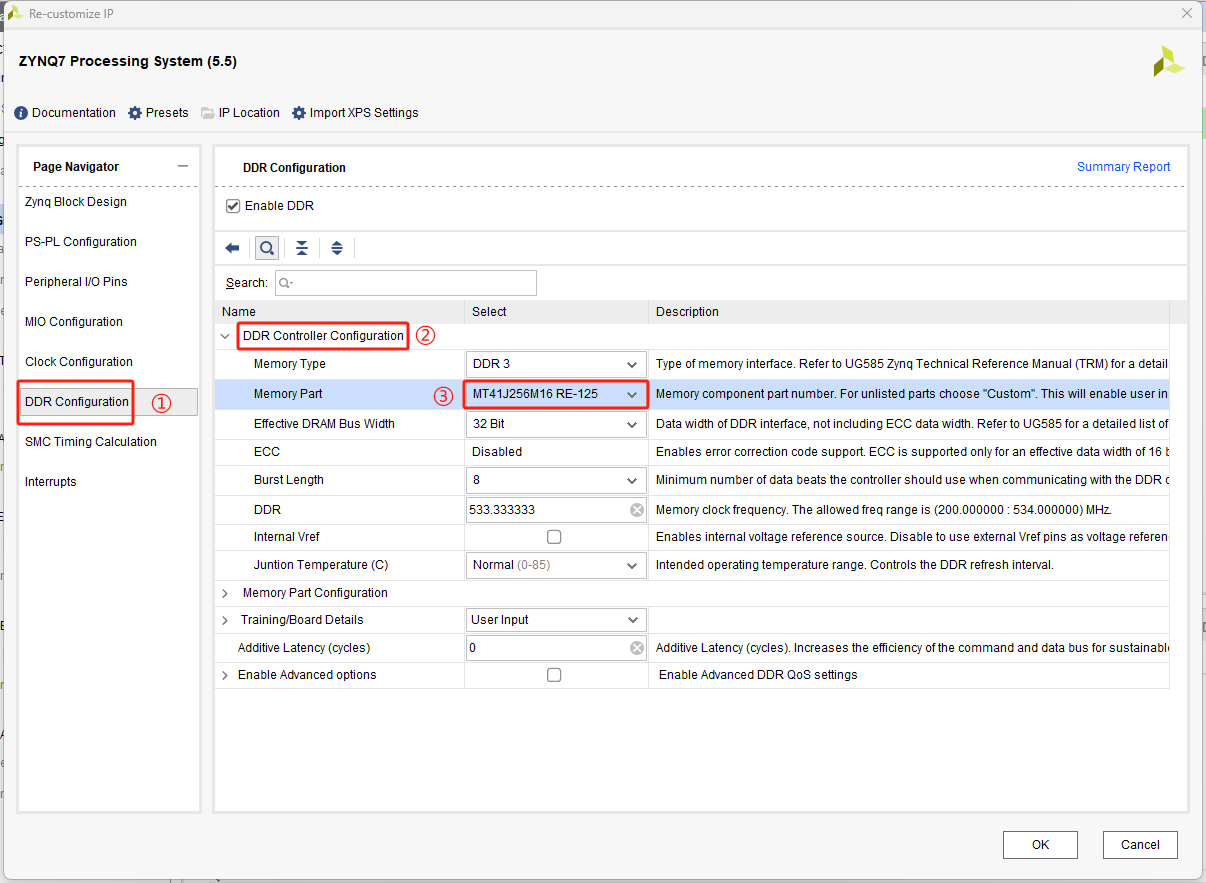
第5步:DDR configuration设置:
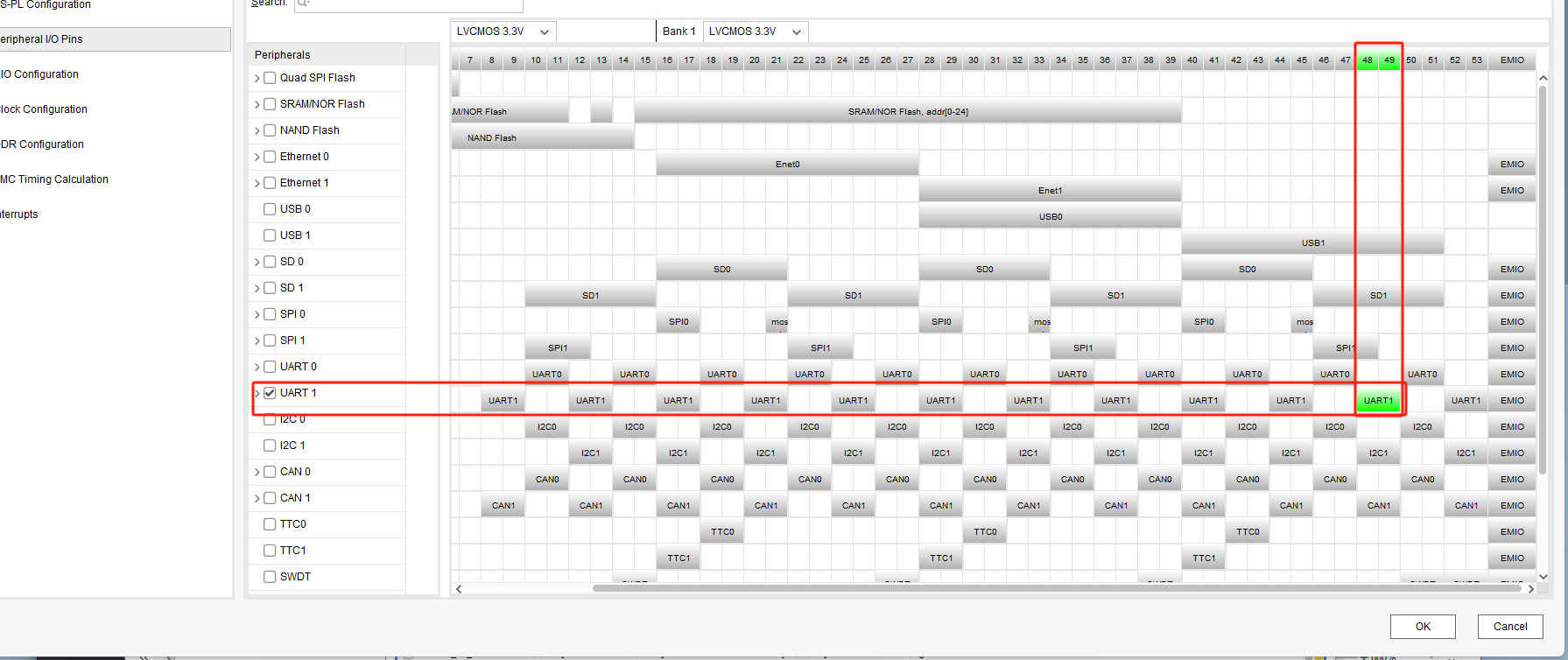
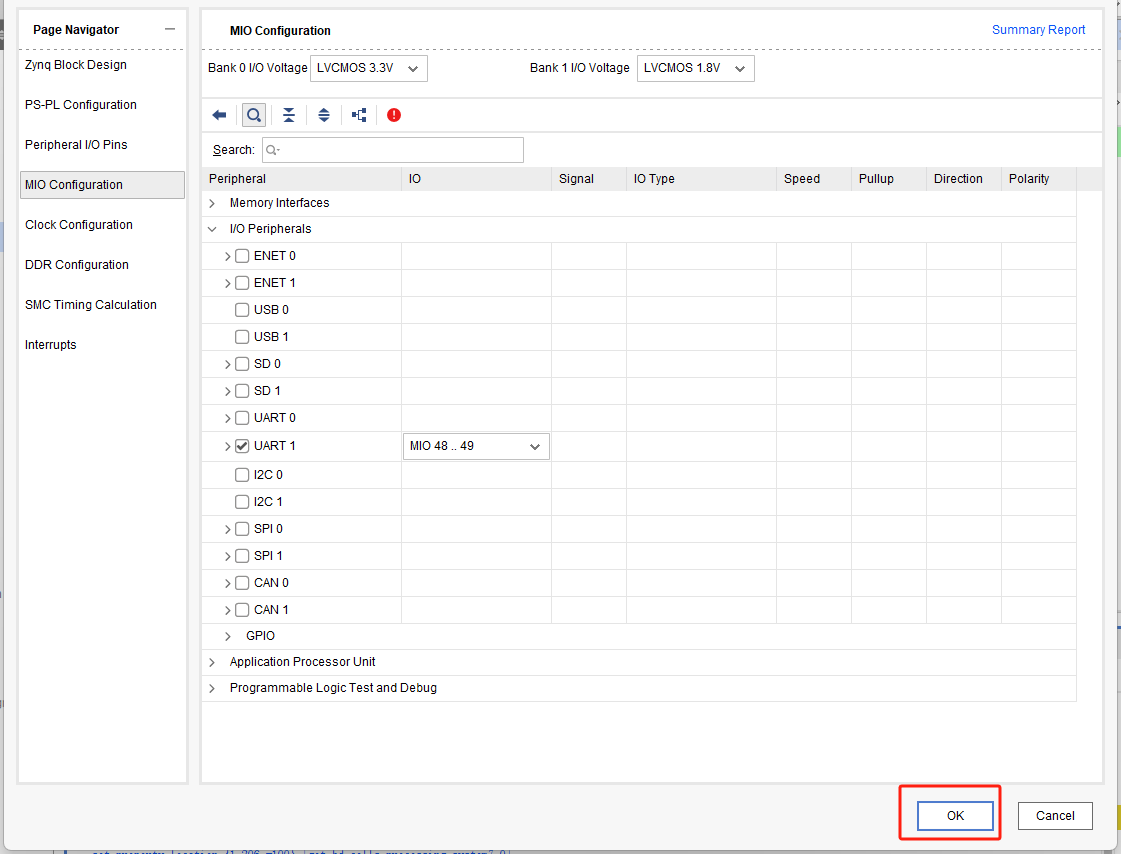
第6步:Peripheral I/O Pins 设置:
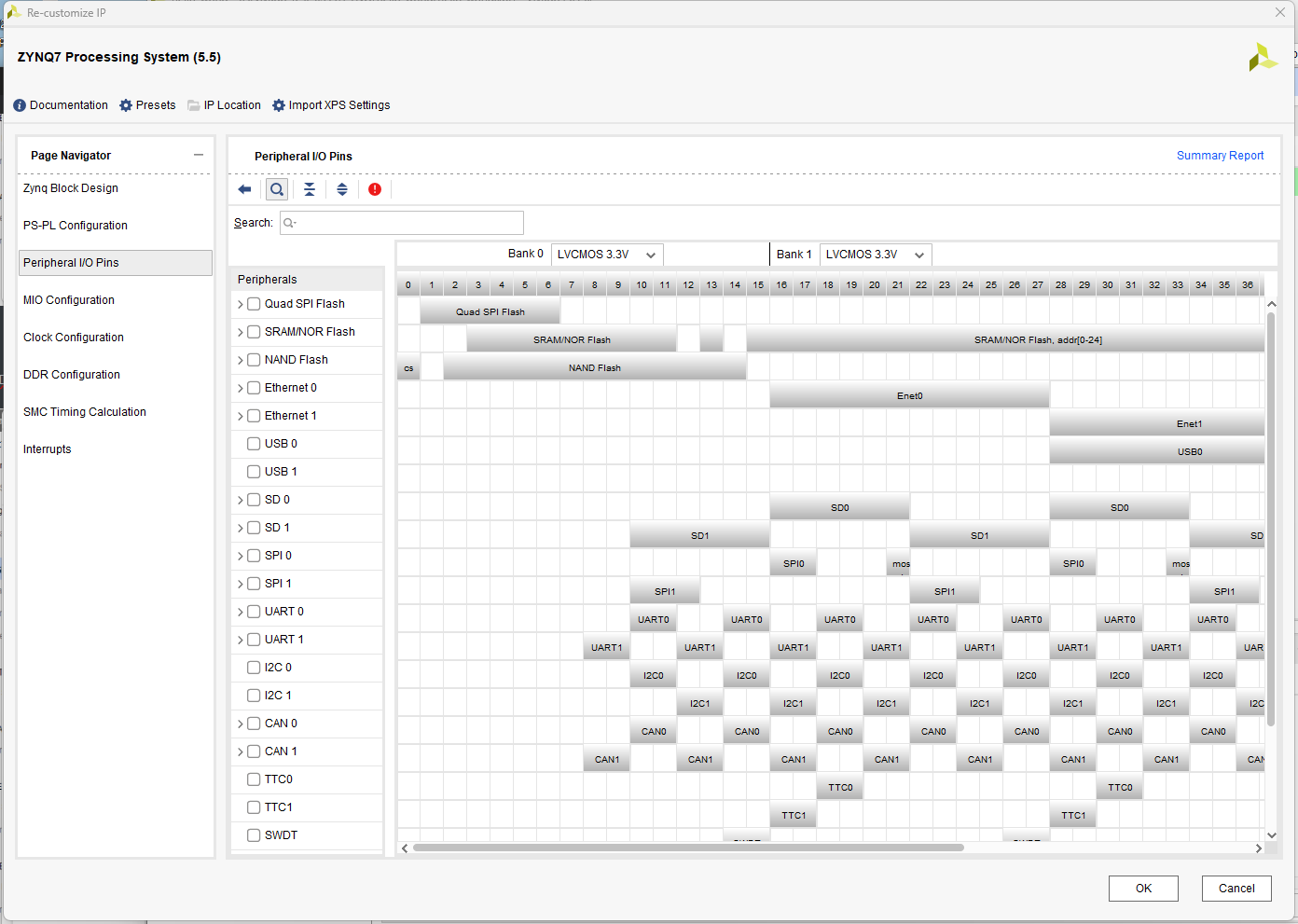
在zedboard的原理图上面搜索:UART
检索到的结果为 对应着 PS_MIO48, PS_MIO49
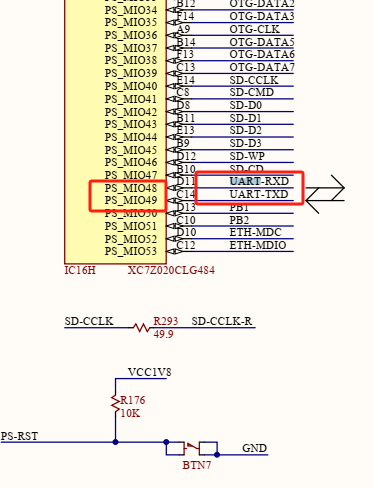
先找到MIO 然后找MIO48,MIO49
选择UART行对应的有MIO列的选项。
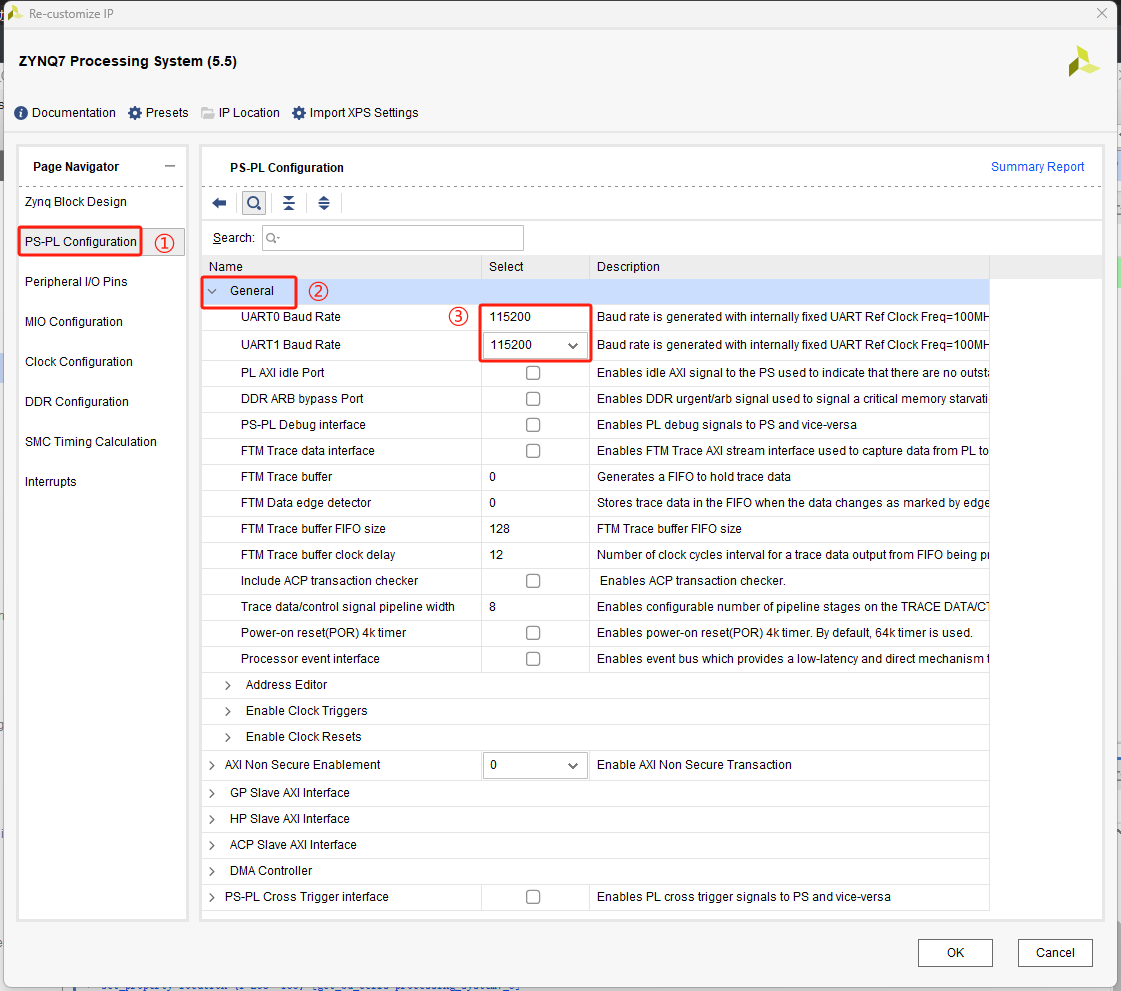
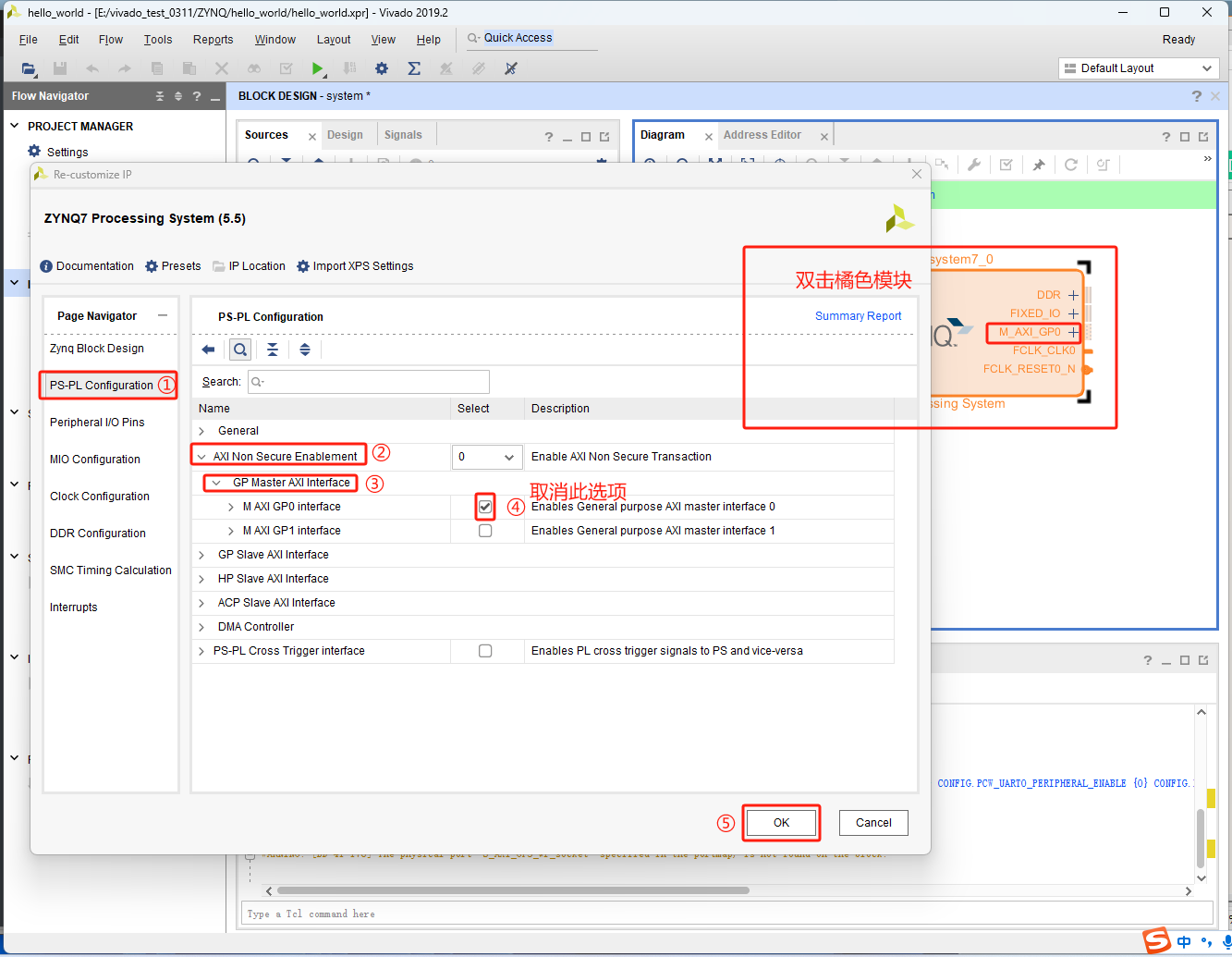
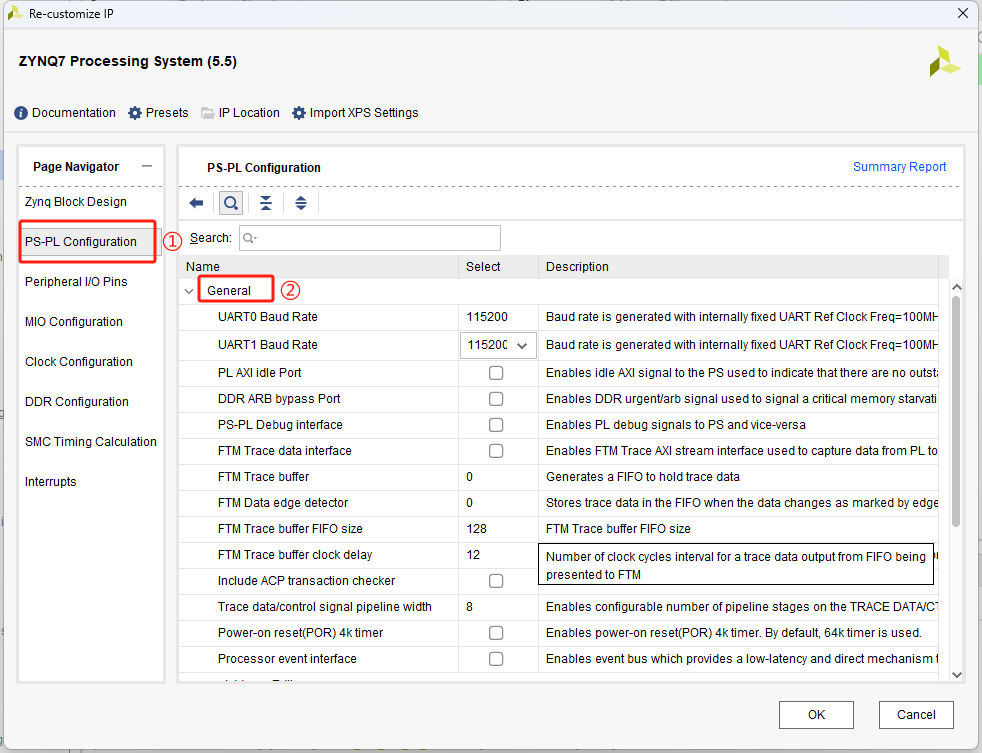
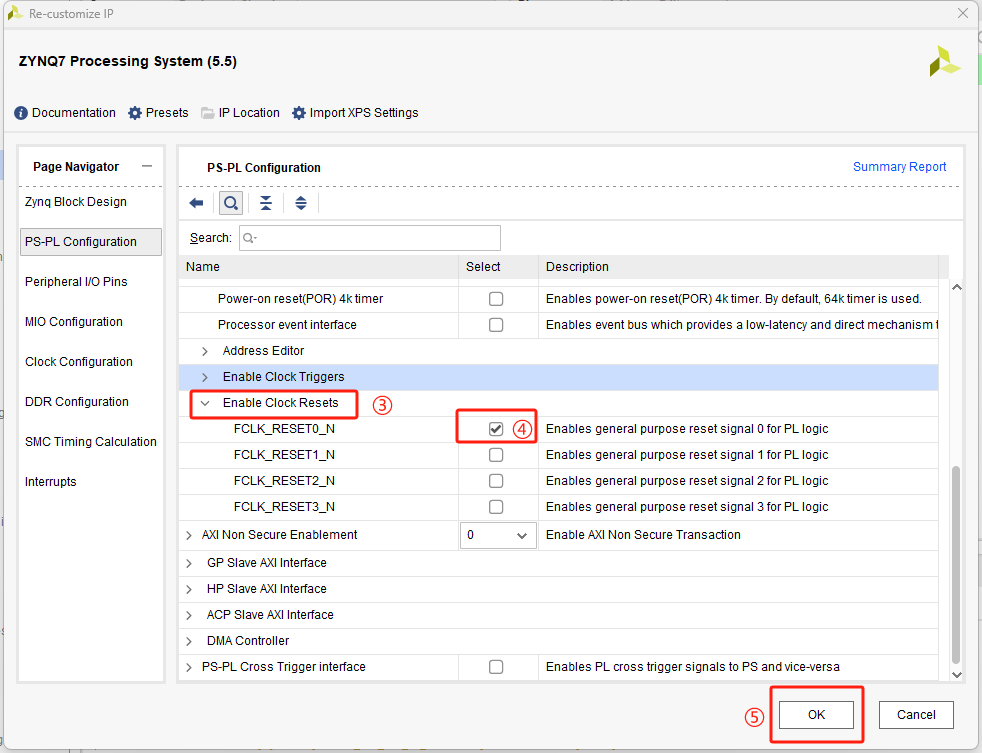
第7步:PS-PL configuration
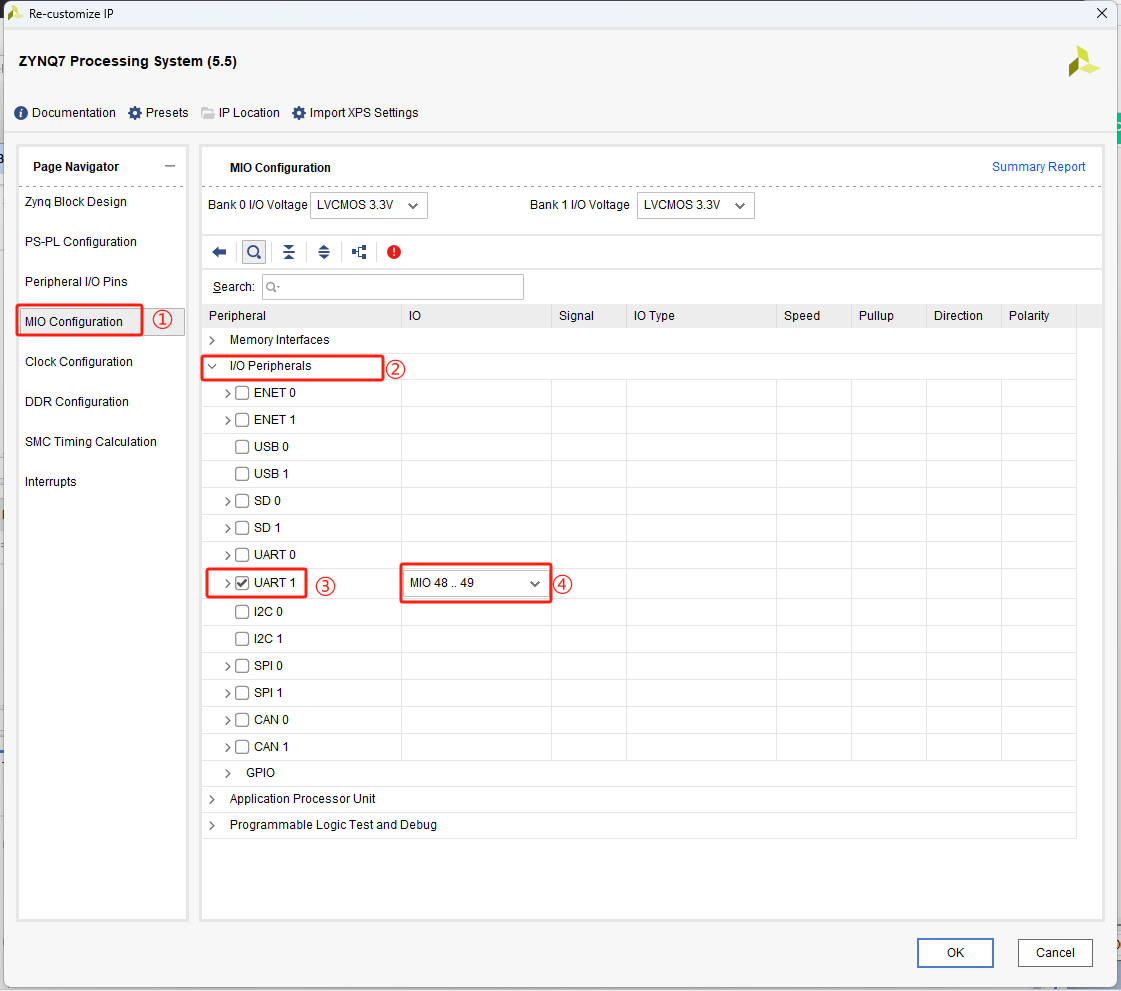
第8步:MIO configuration 复检之前的MIO选项
第9步:原理图上确认电压
因为bank501为1.8V
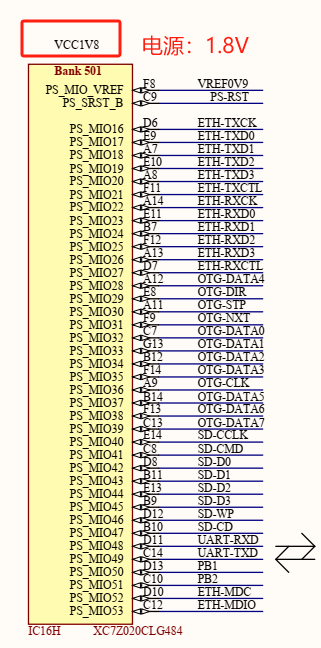
对照着原理图仔细检查各部分的供电系统。
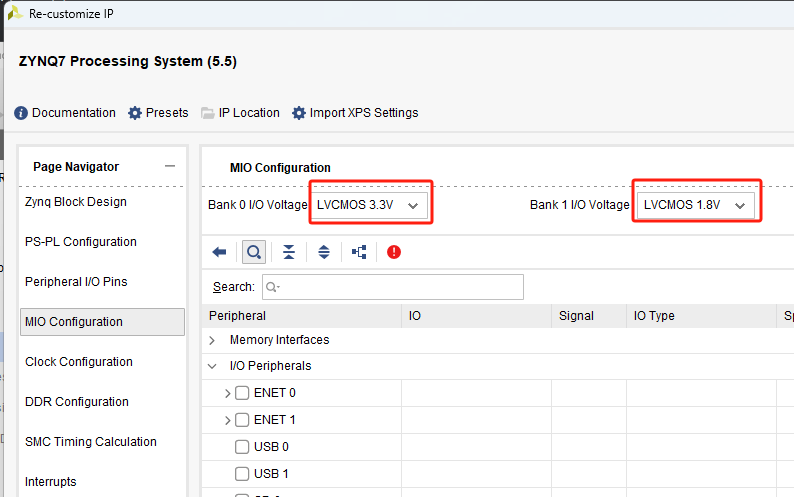
完成上述操作后,点击OK.
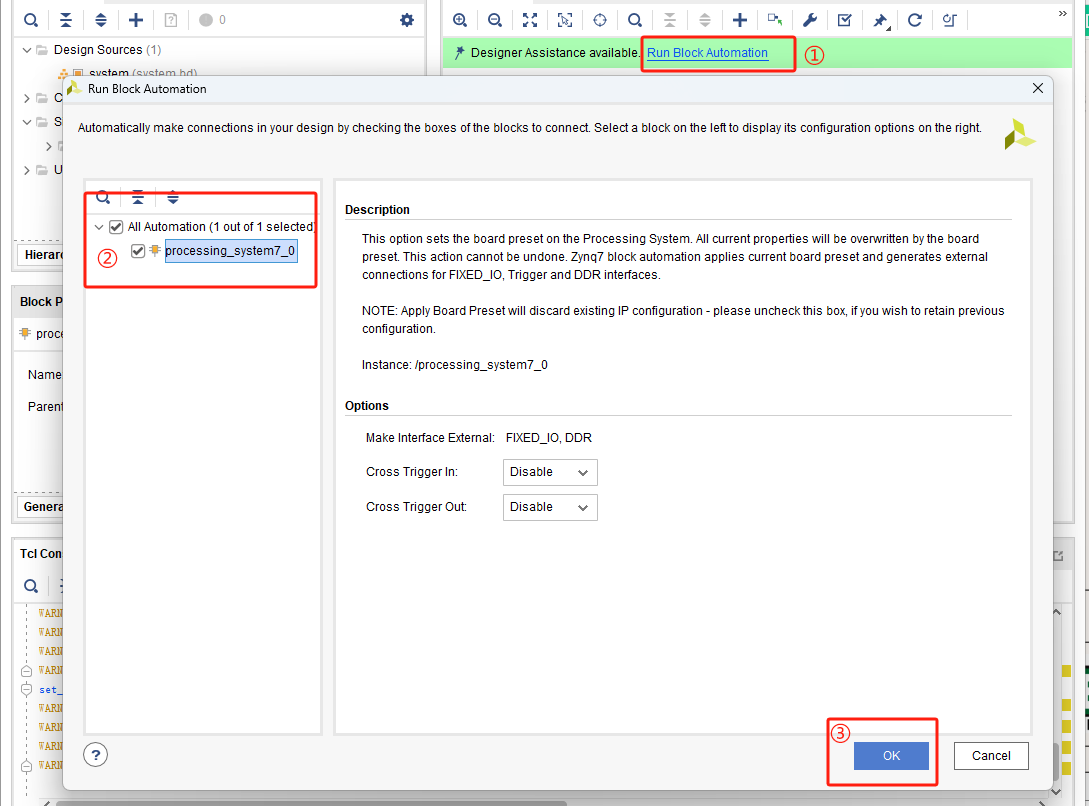
第10步:对PS模块进行设置:
等待一段时间后:
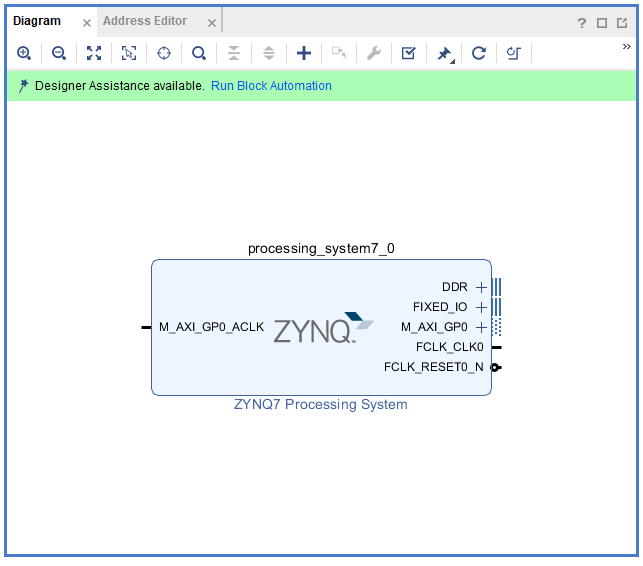
将FIX_IO展开(进行仔细检查)
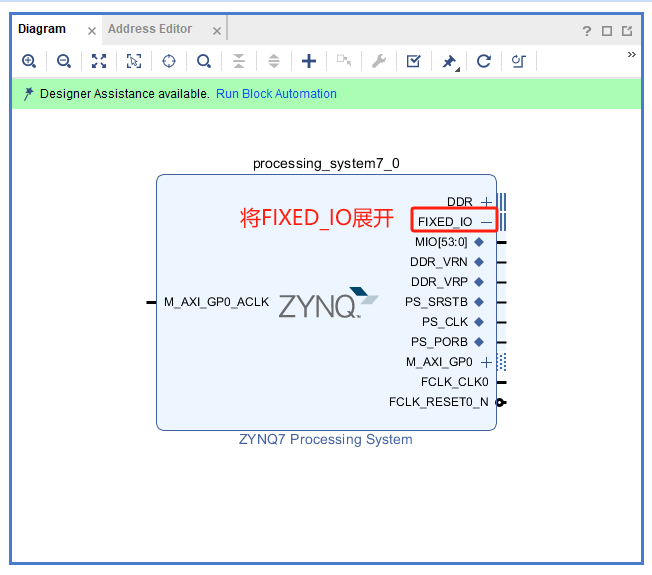
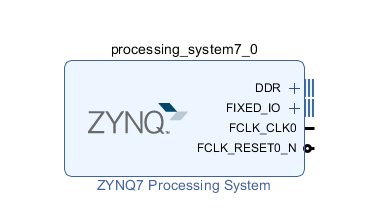
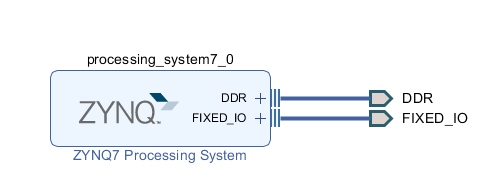
设置完之后,模块变为如下状态。
然后:
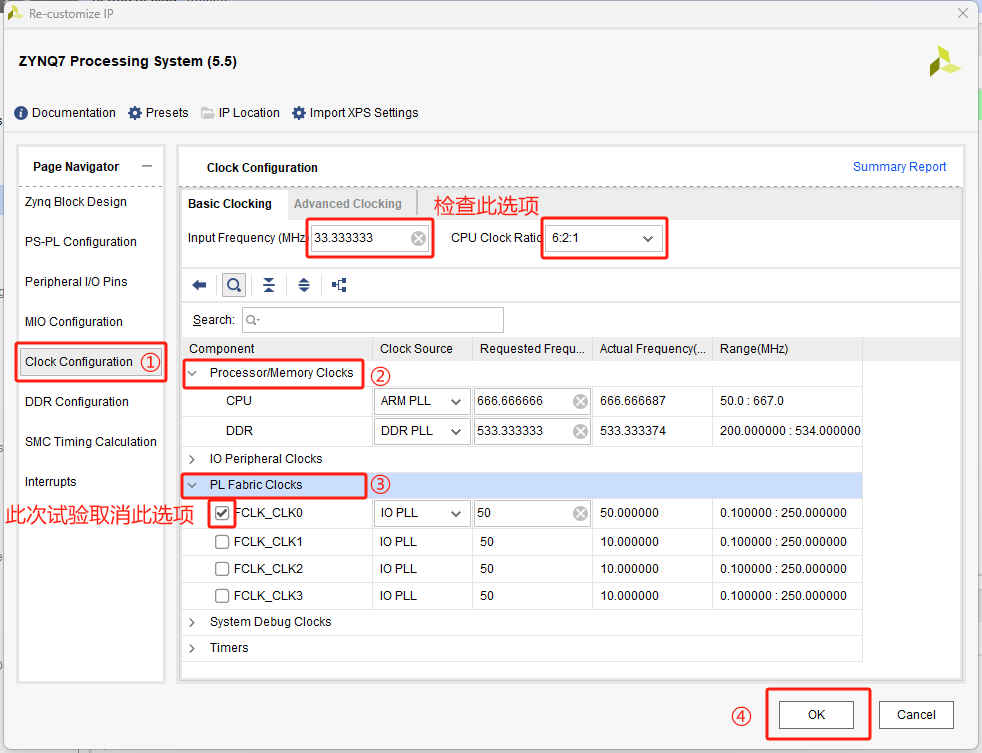
双击模块
向下滑动:
至此硬件配置完成:
开始创建端口:
端口自动创建完成
至此zynq的PS的配置结束了
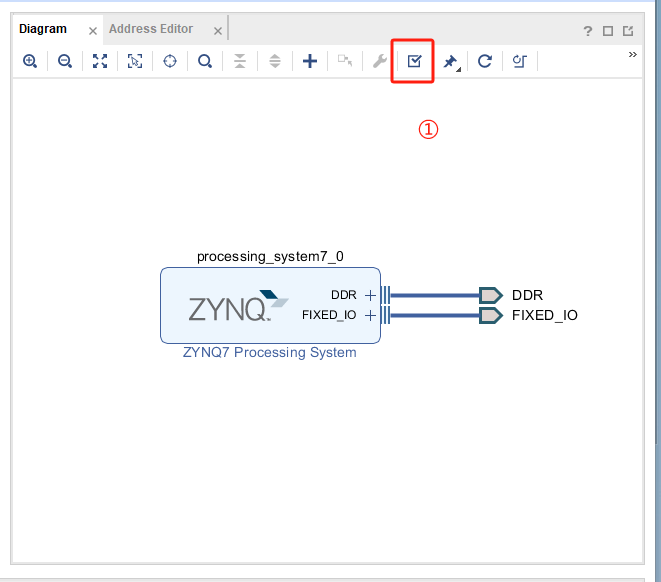
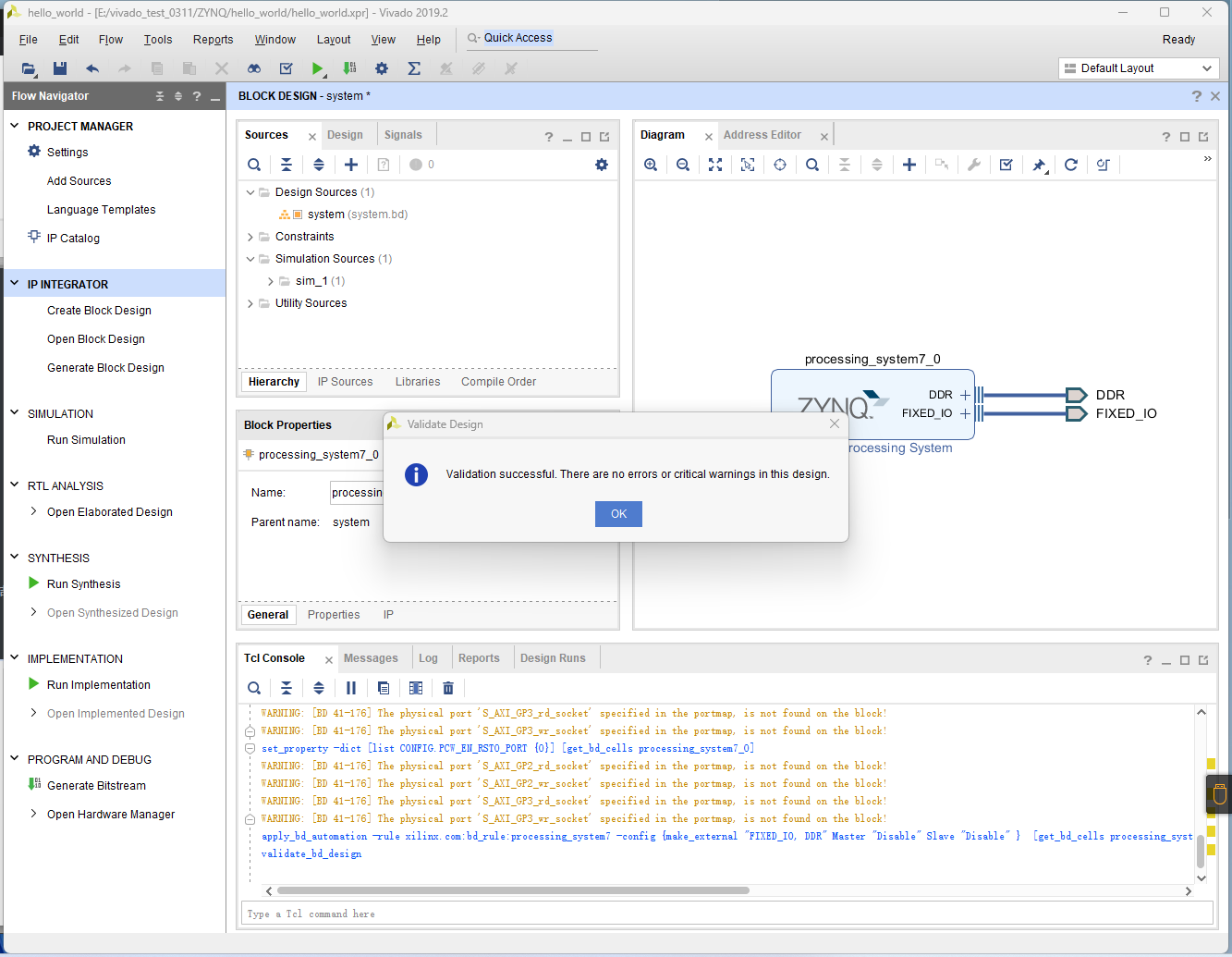
第11步:开始验证设计
验证成功:无报错和警告
第12步:生成管脚约束
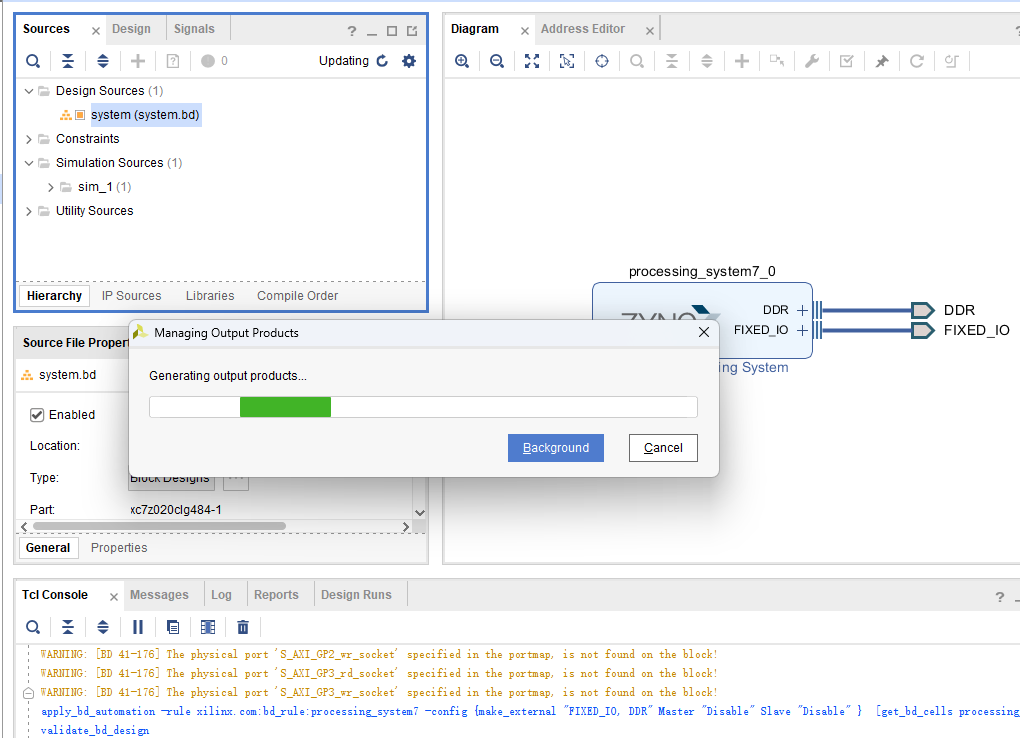
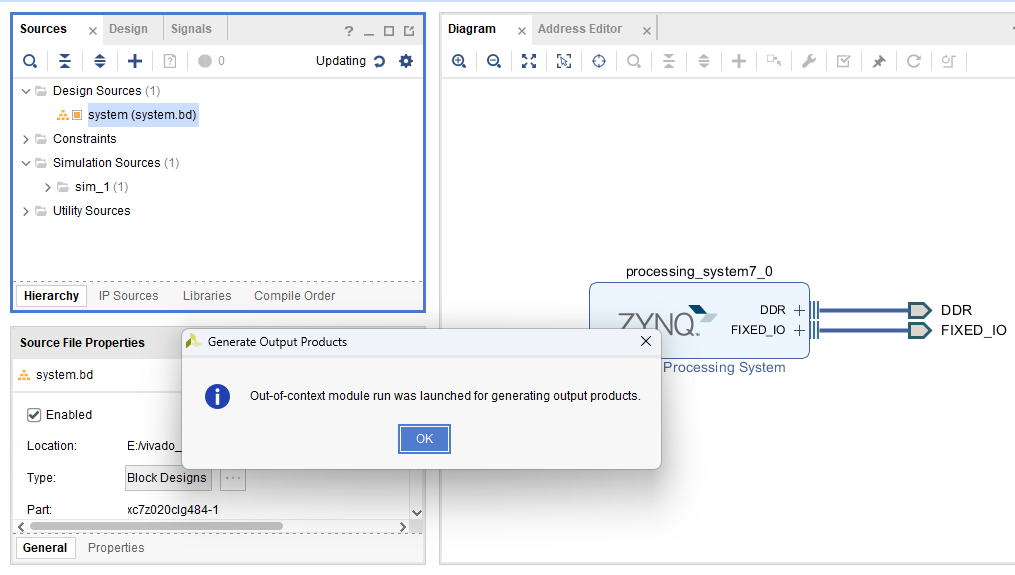
等待许久之后:
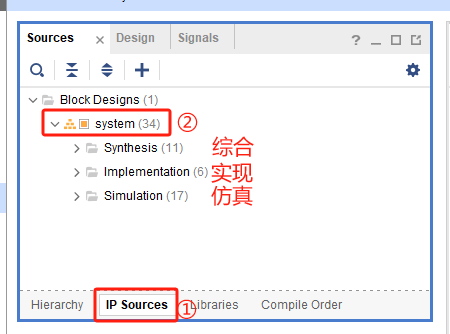
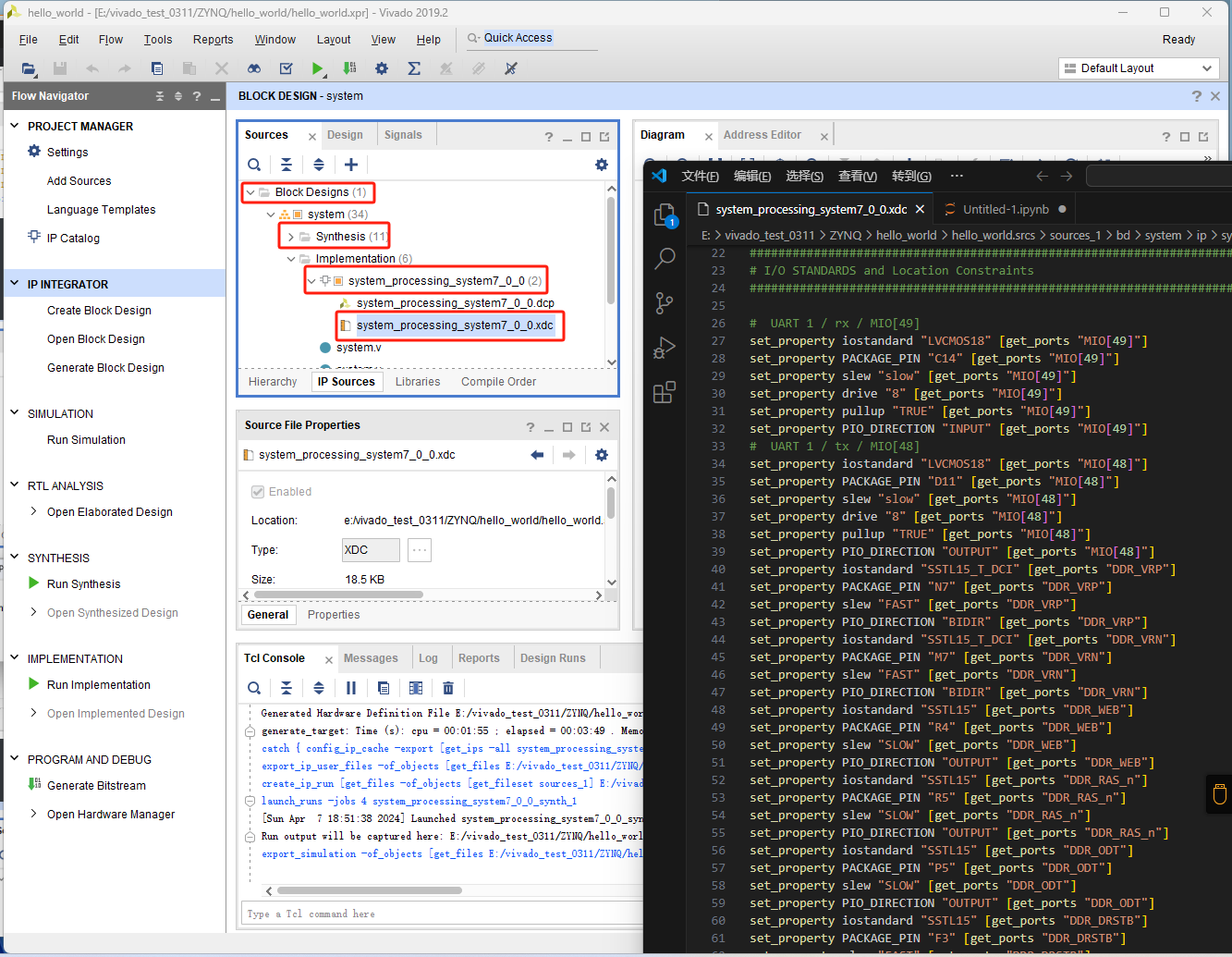
查看管脚约束,DDR约束
PS不需要手动的去对每一个管脚进行约束;
工具会自动的去进行管脚分配;
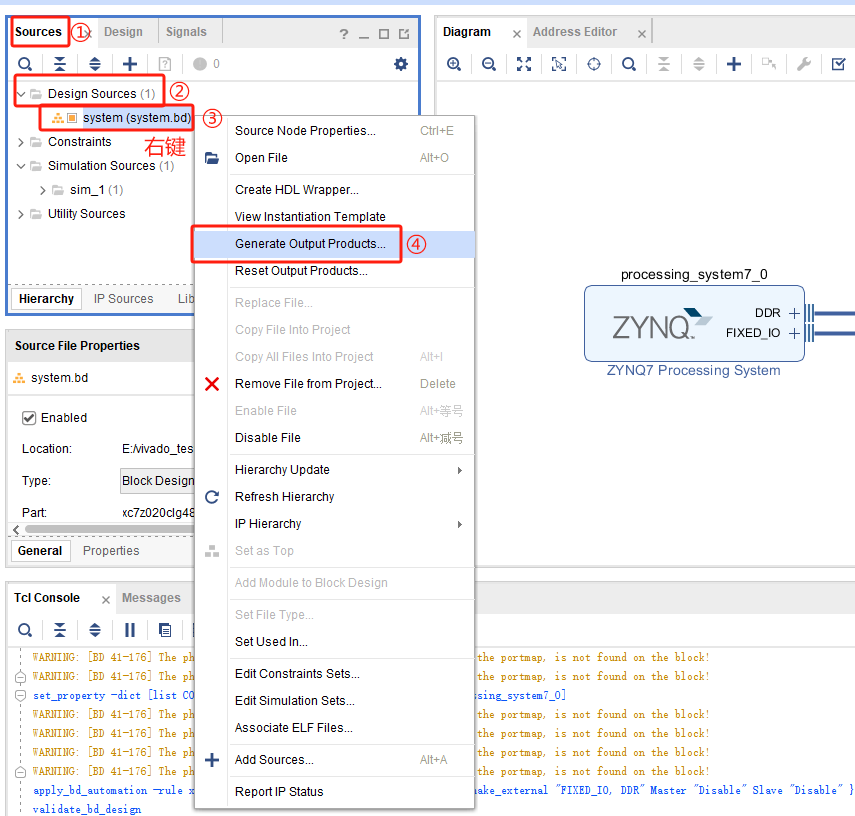
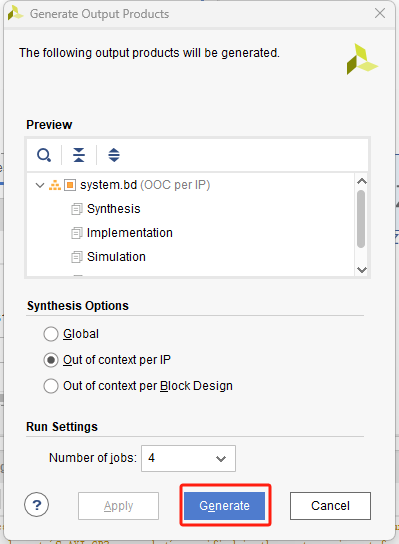
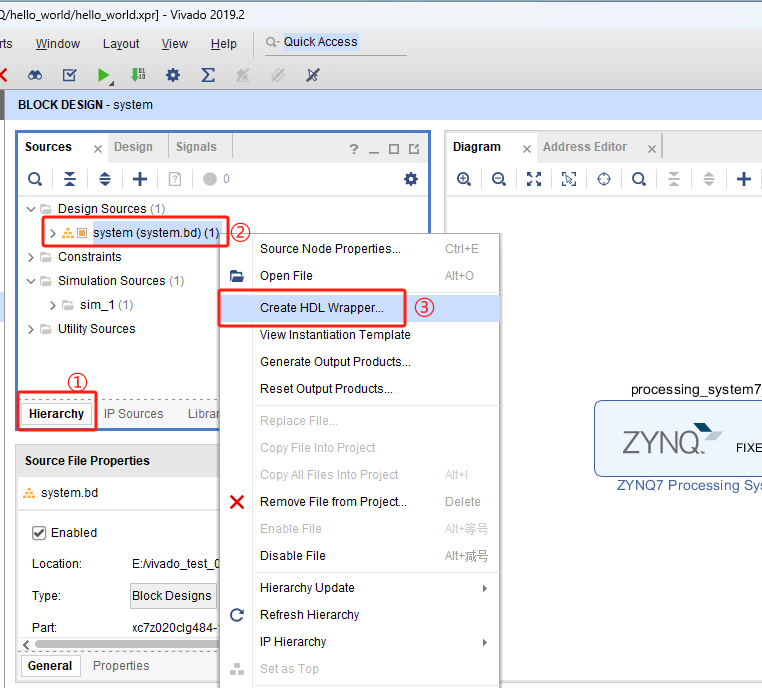
第13步:做HDL封装
为设计完成HDL(封装)
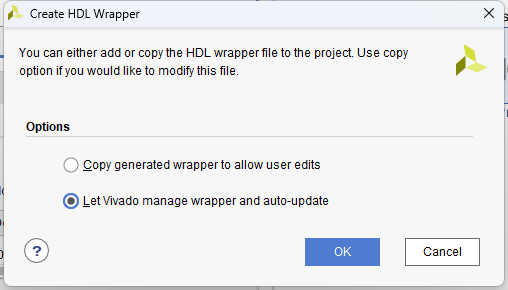
直接点击OK
之后多了如下的文件:
此文件都是verilog语言:完成了对之前的设计的例化
至此硬件的搭建完毕;
不涉及PL部分的话,不用在此时生成比特流
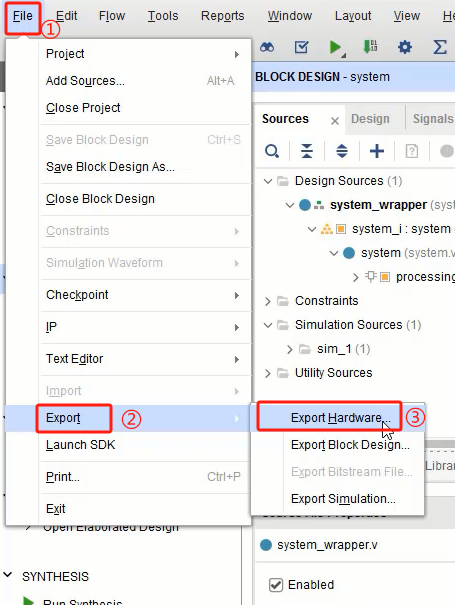
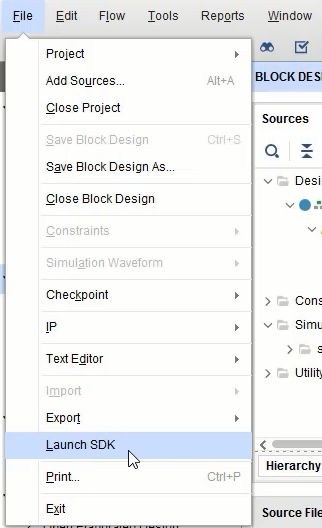
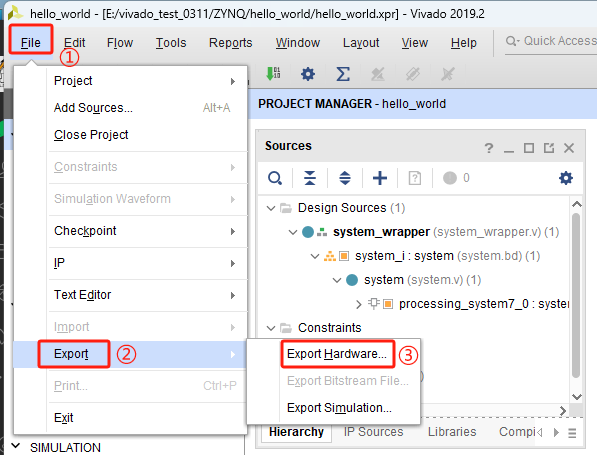
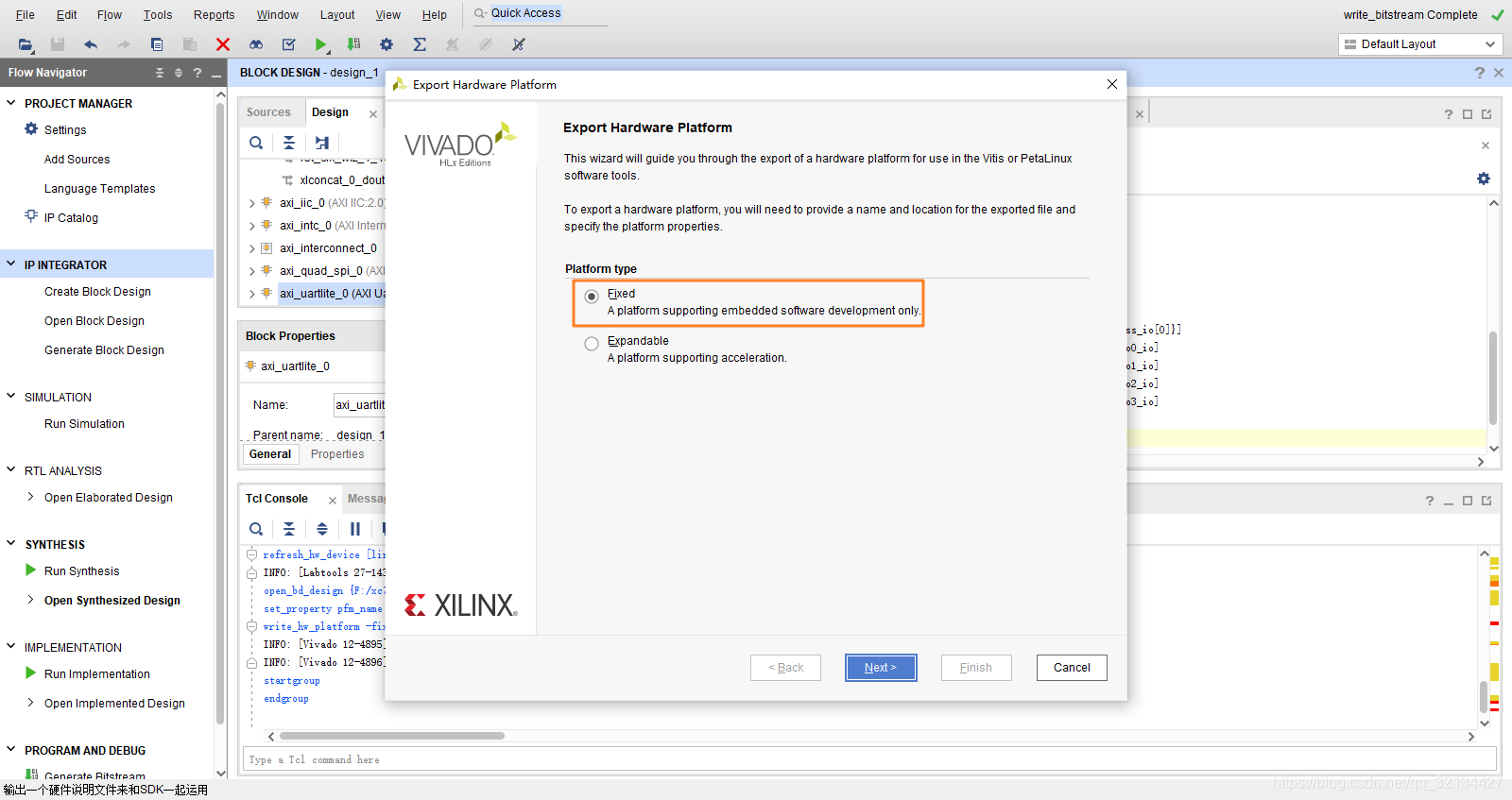
第14步:导出SDK
直接导出到SDK
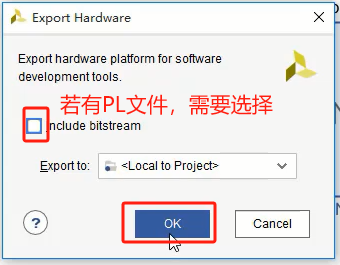
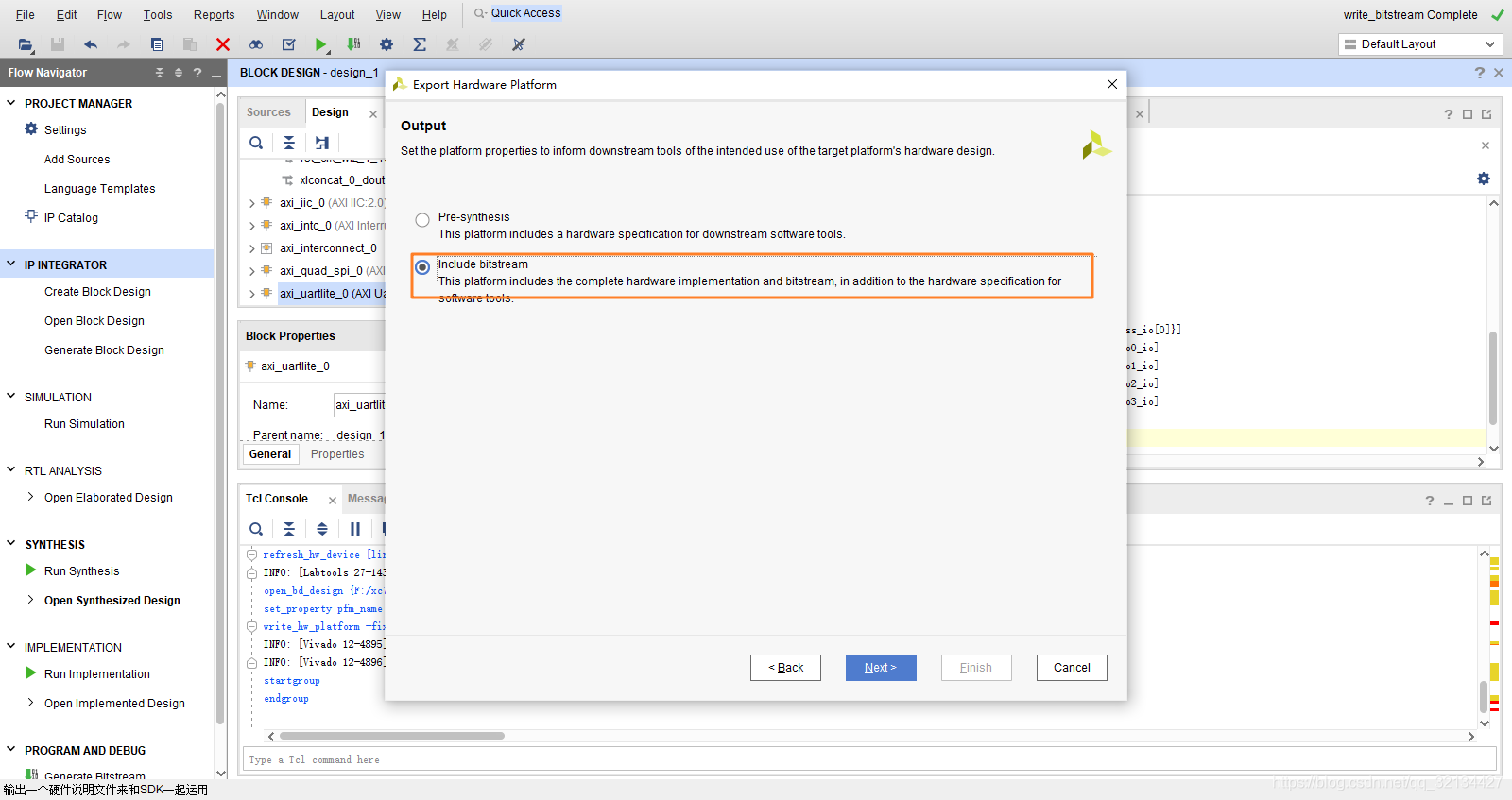
此选项包含是否需要包含比特流。(有PL文件的时候可以选择)
导出路径可以是默认工程的路径,也可以是自定义路径。
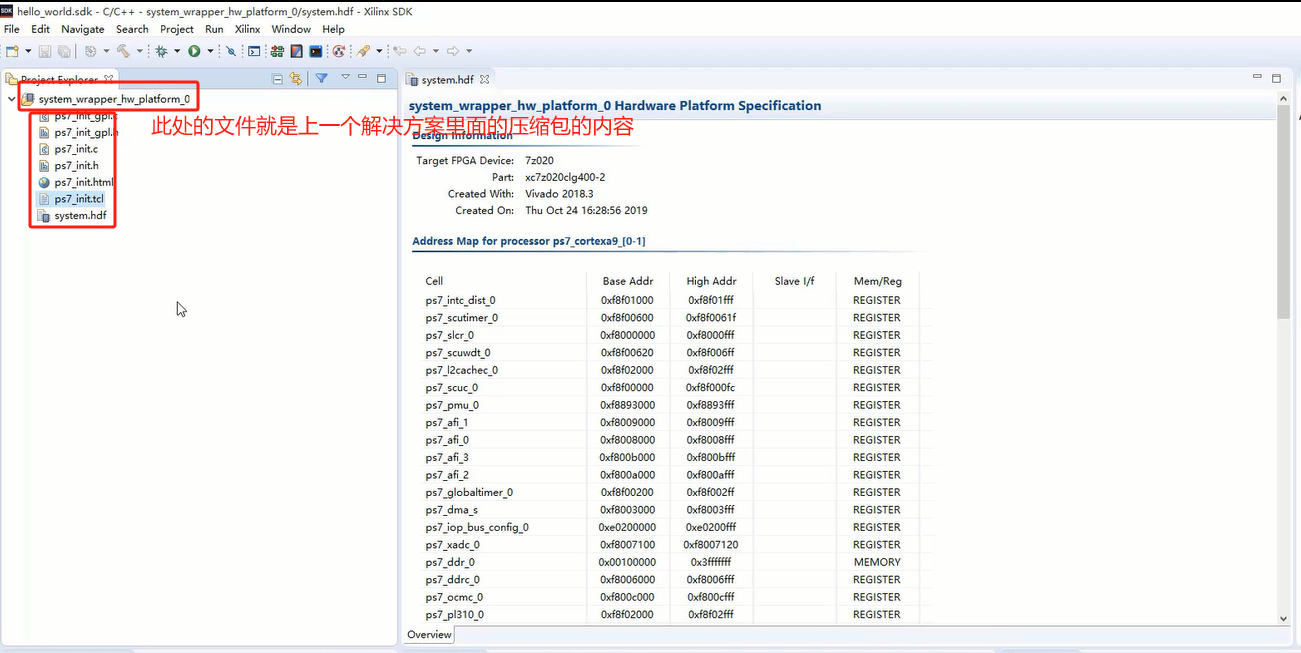
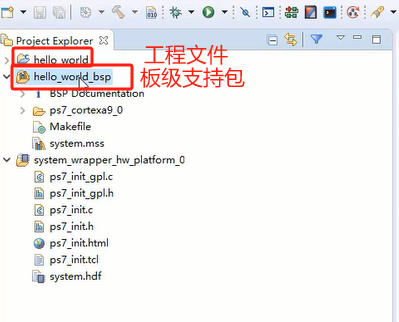
找到工程路径,此时生成了SDK文件。
文件夹里面只有一个文件
方法①:(不推荐)
用解压软件打开此HDF文件,解压出的文件之后会用到
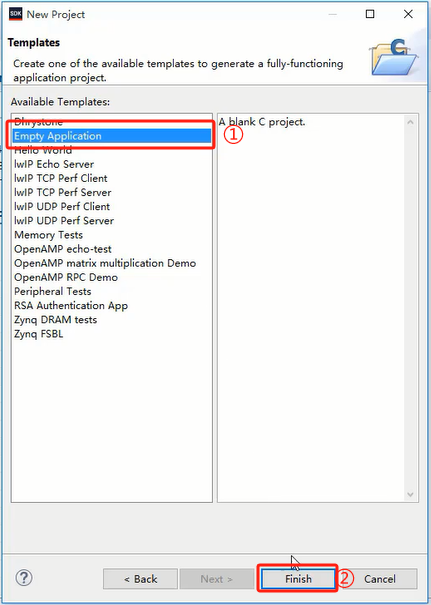
方法②:用SDK(VIVADO)解决(本次采用的)
vivado2019.2之前的版本含有SDK可以用这个方法:
vivado2019.2之后的版本推出了Vitis工具 来替换了之前版本的SDK功能。
出现如下的状态的

打开了此软件开发环境;
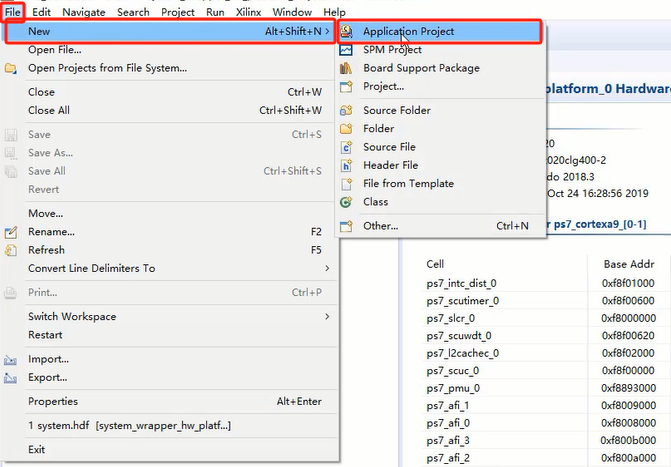
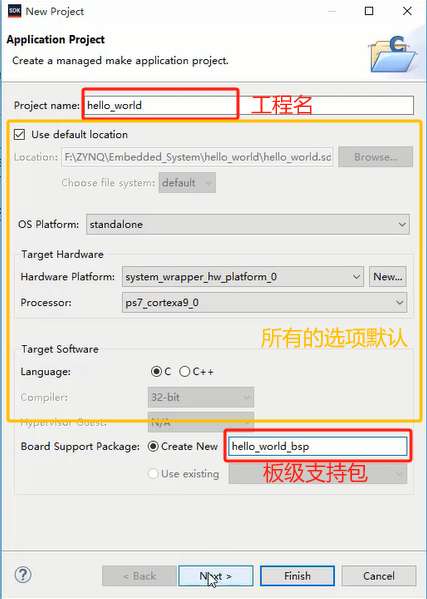
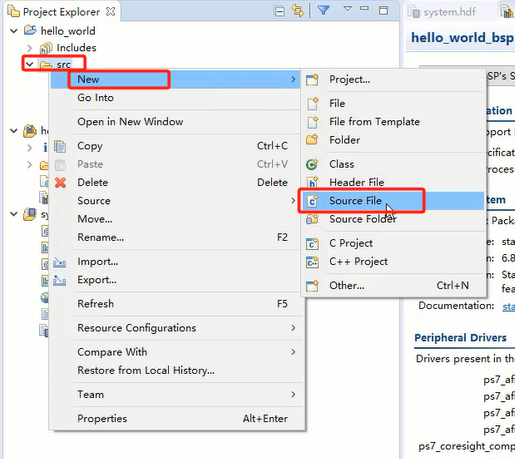
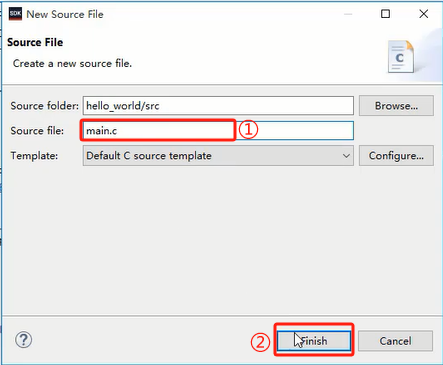
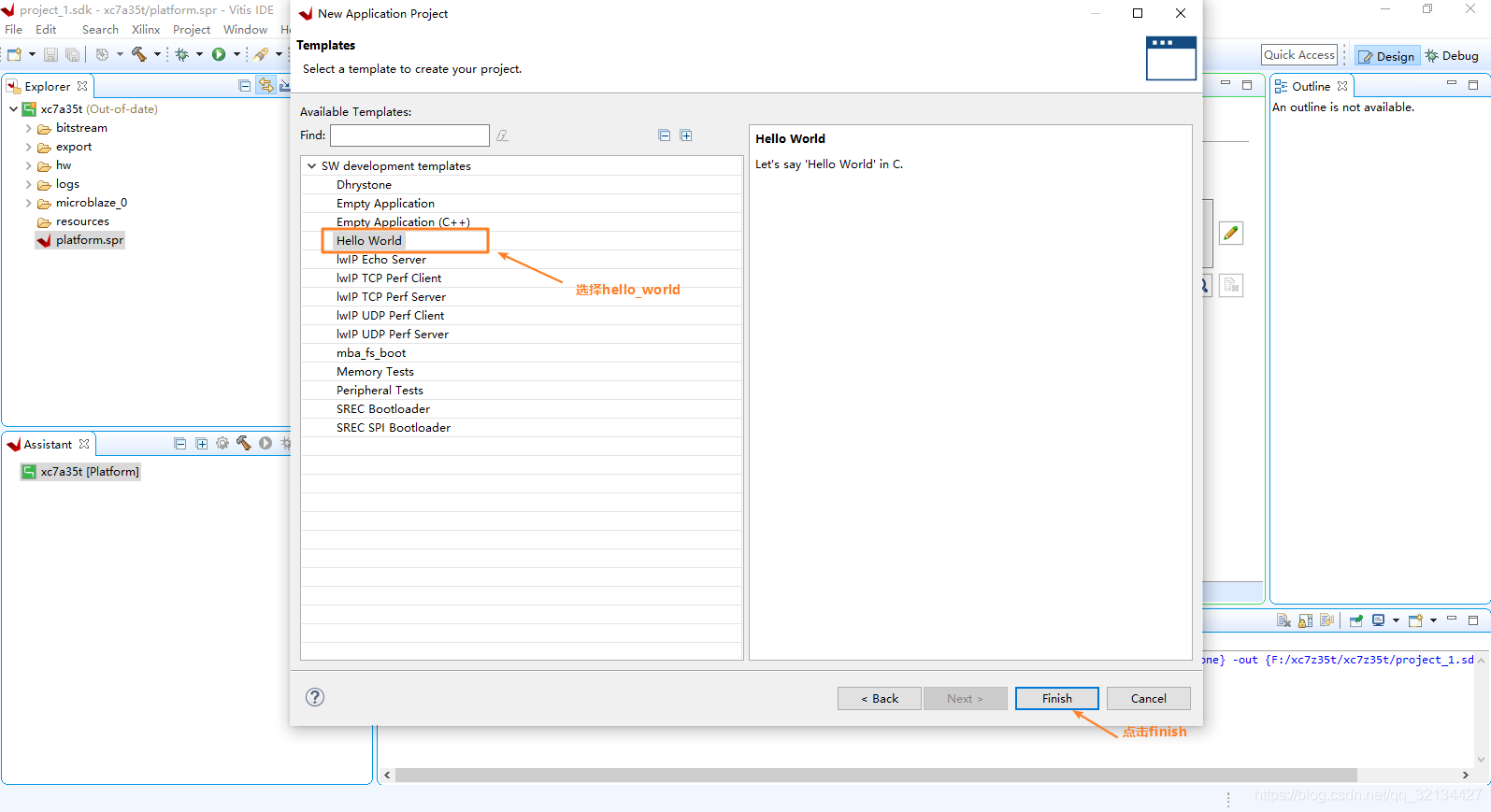
创建C文件:
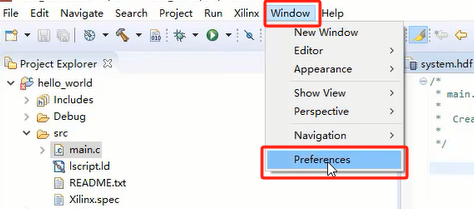
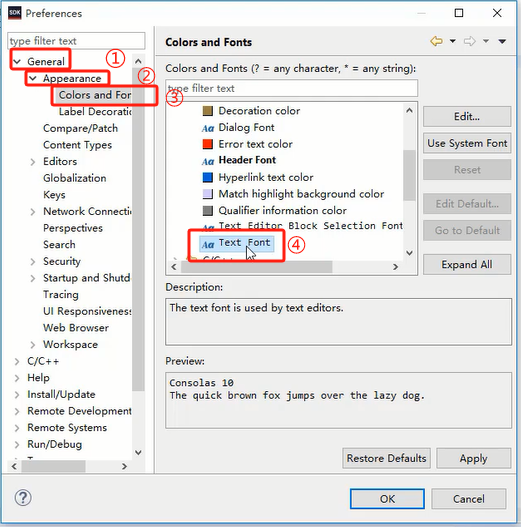
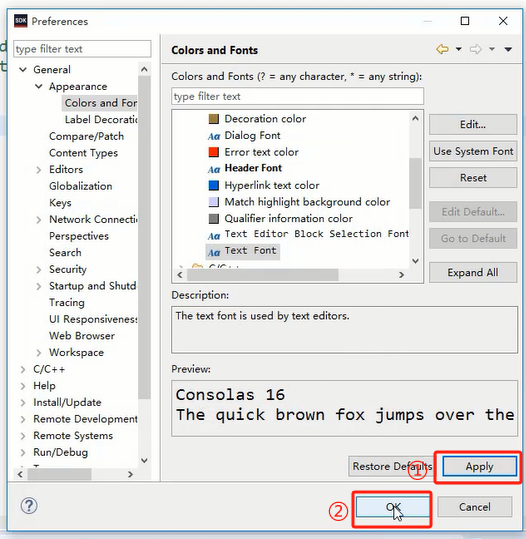
设置字体;
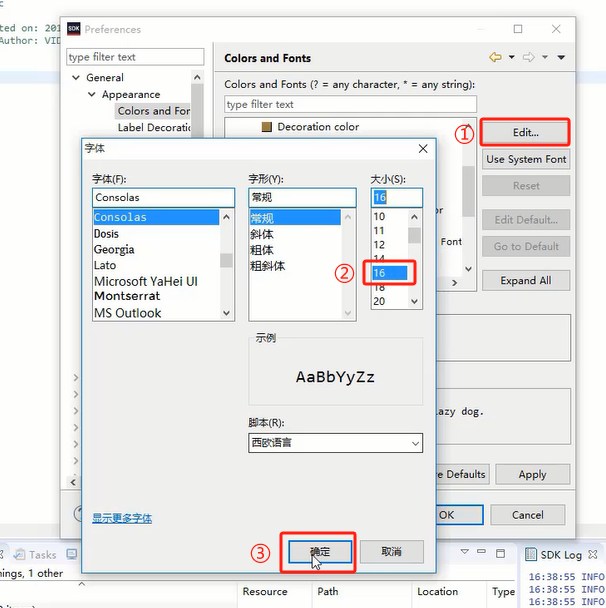
设置字号:
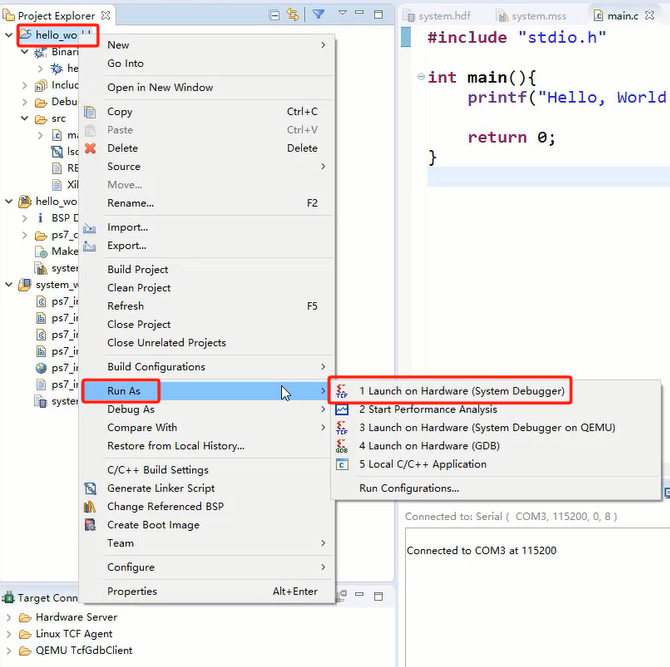
测试代码:
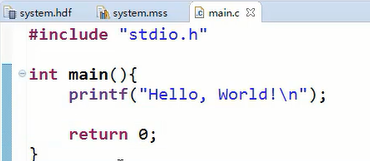
#include:"stdio.h"
int main(){
printf("Hello, World!\n");
return 0;
}
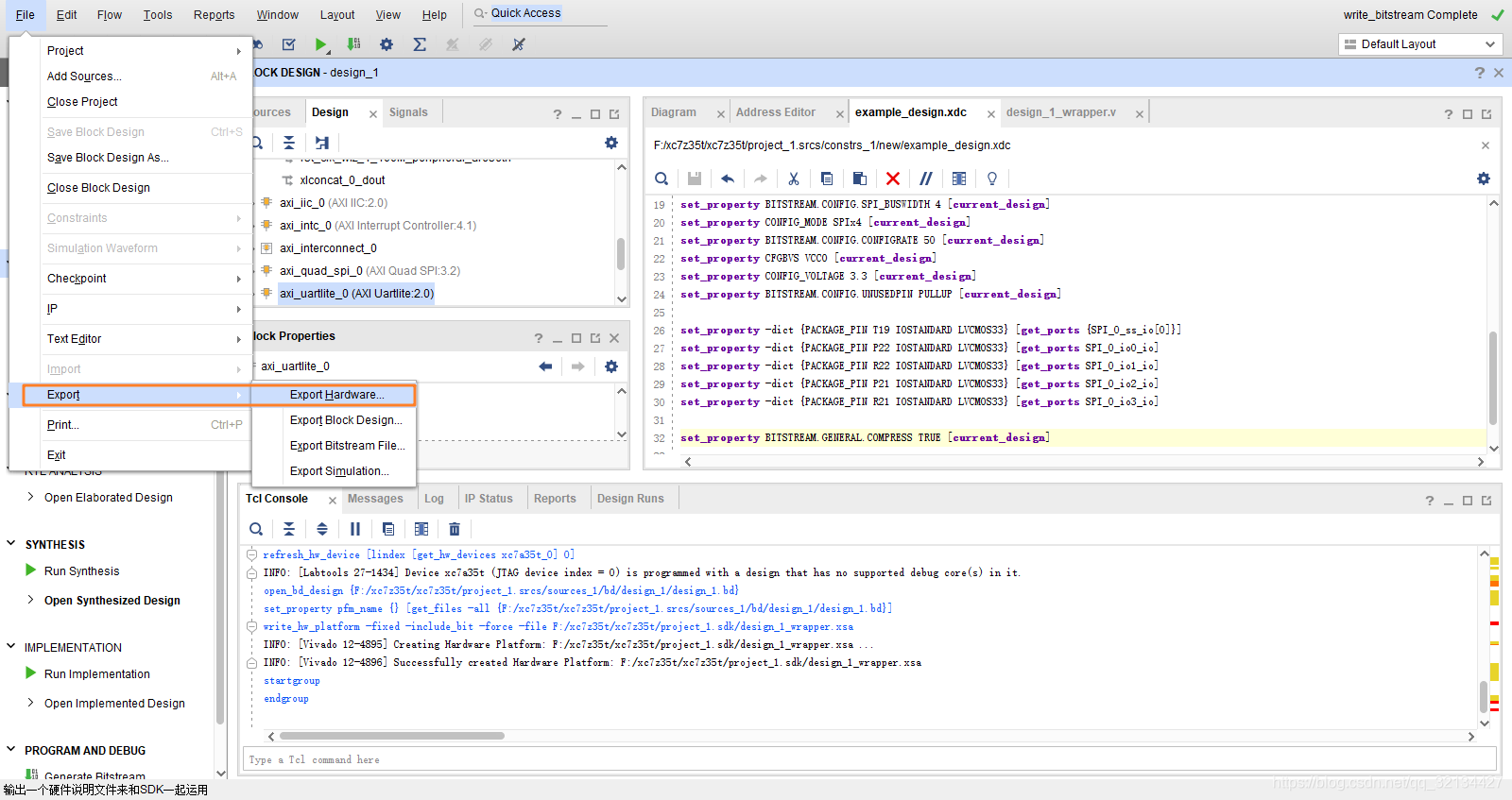
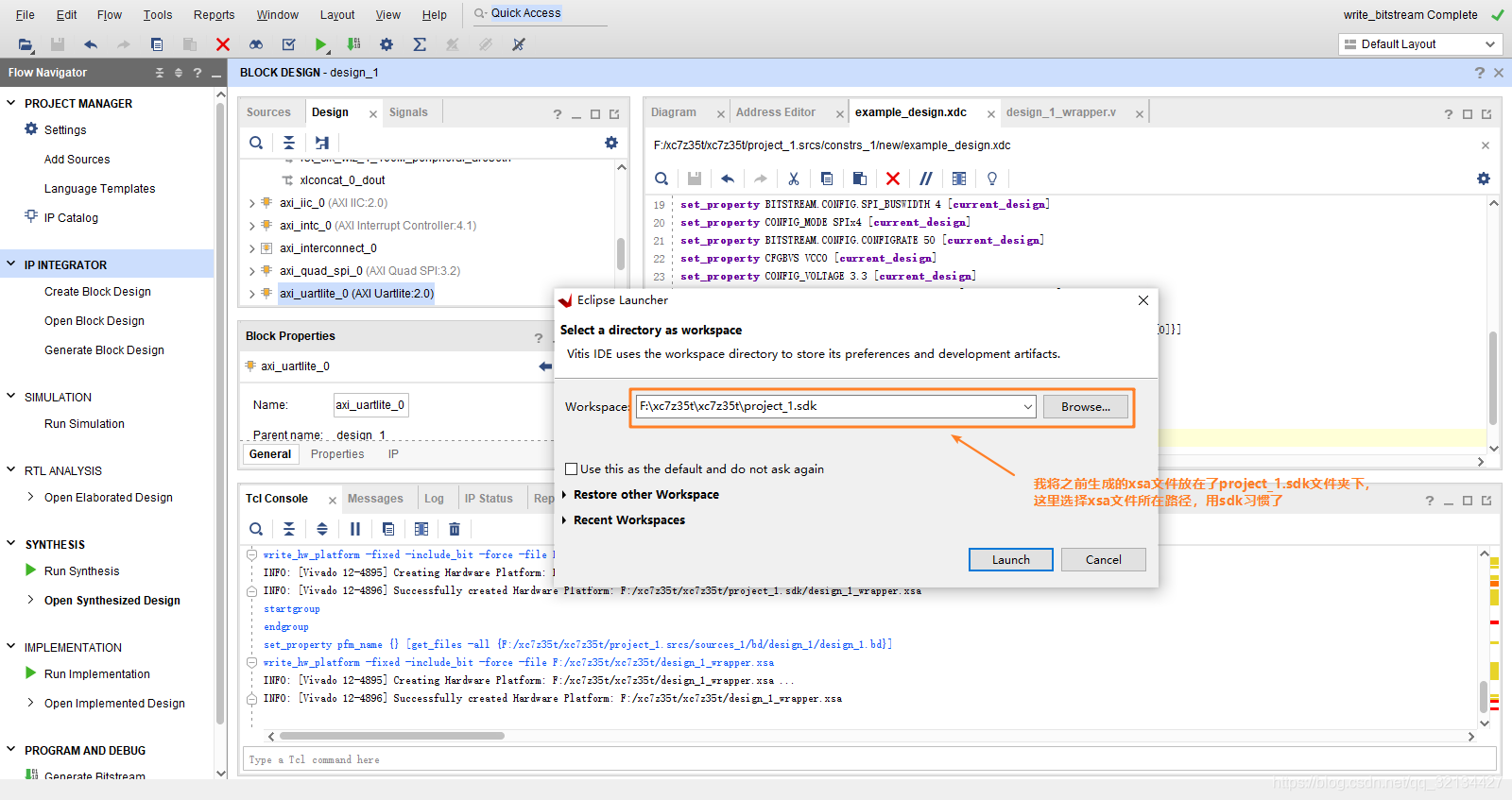
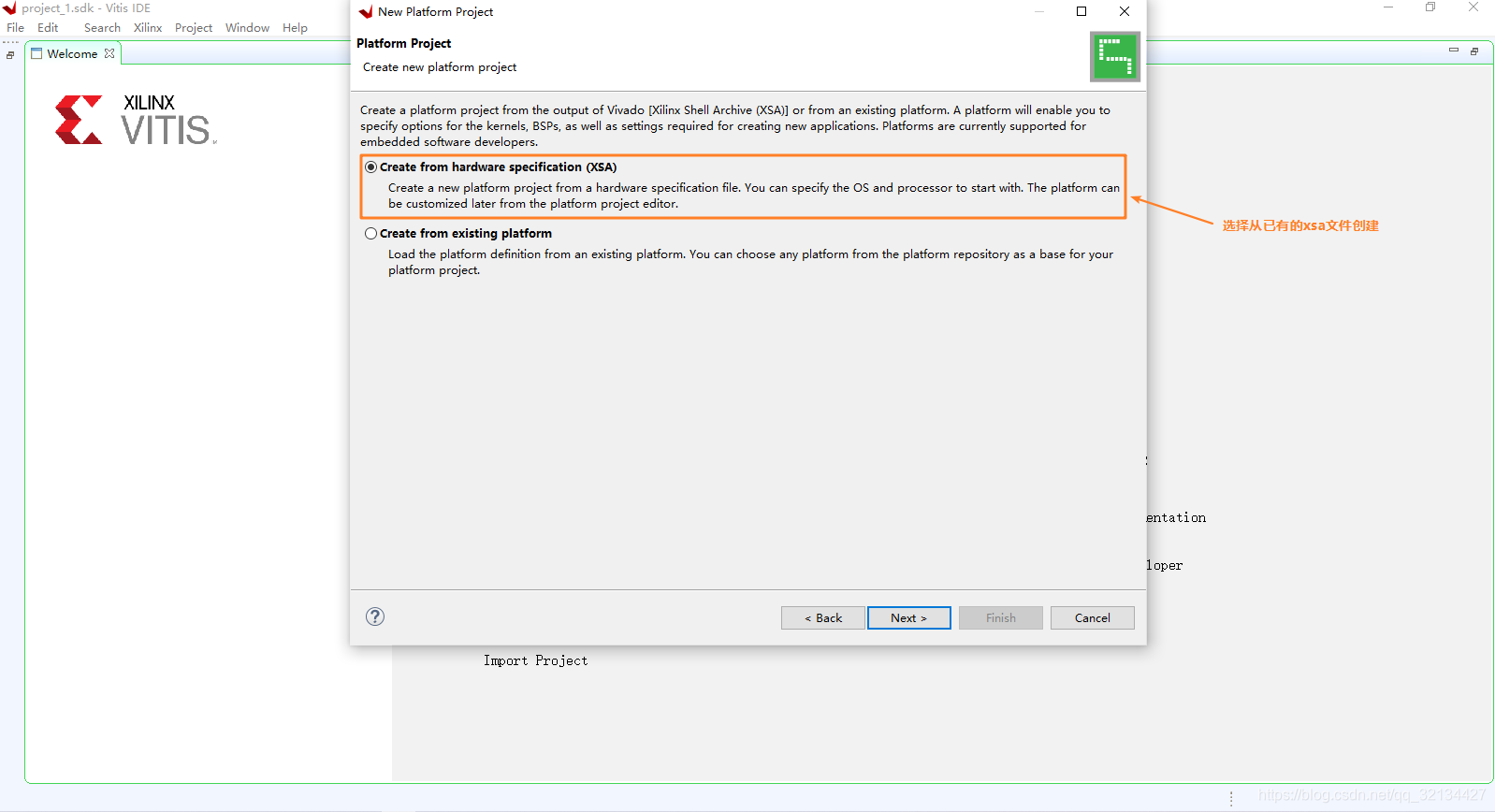
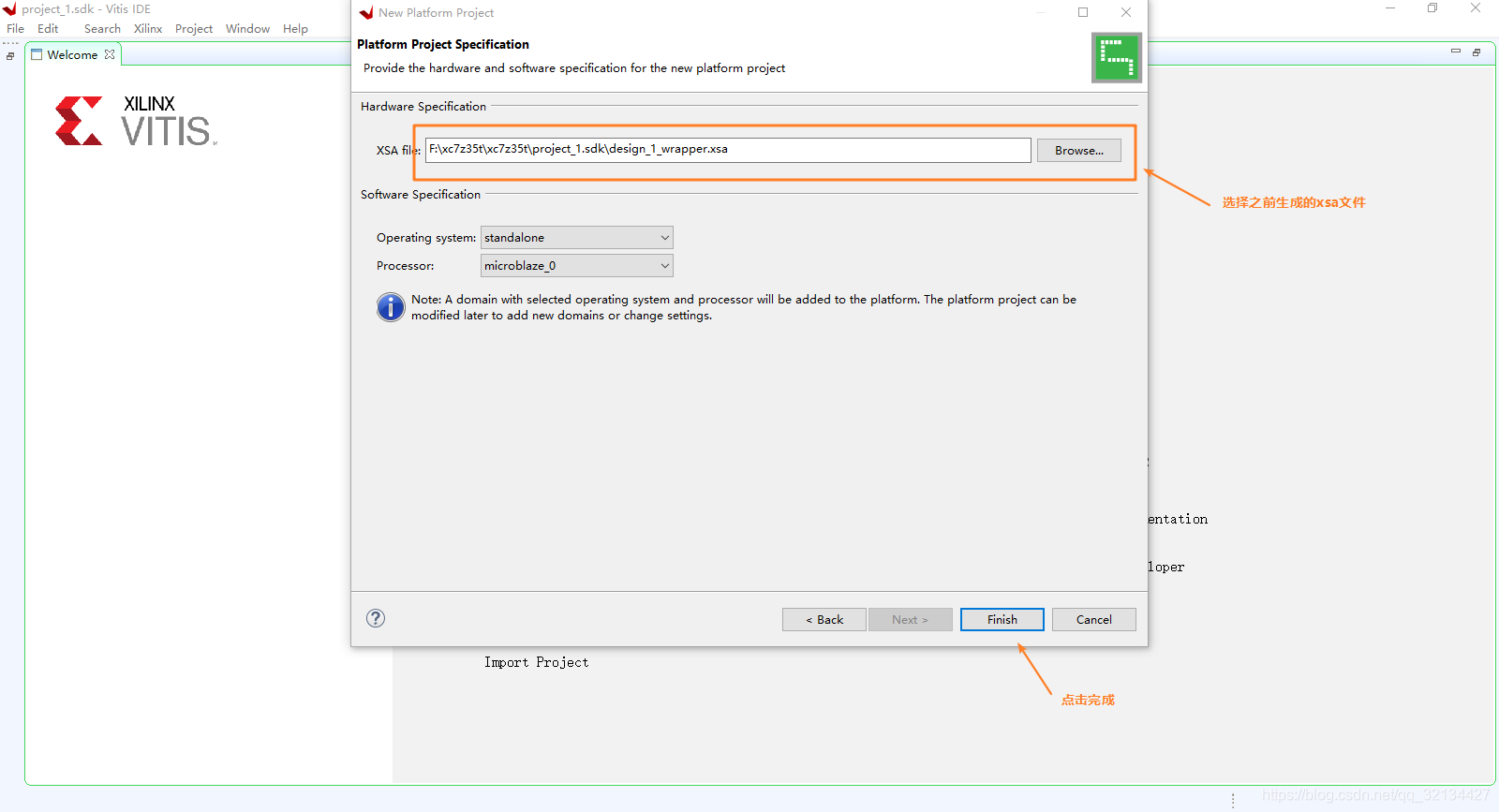
方法③:VITITS(vivado2019.2之后的版本采用的)
然后到处xsa文件:
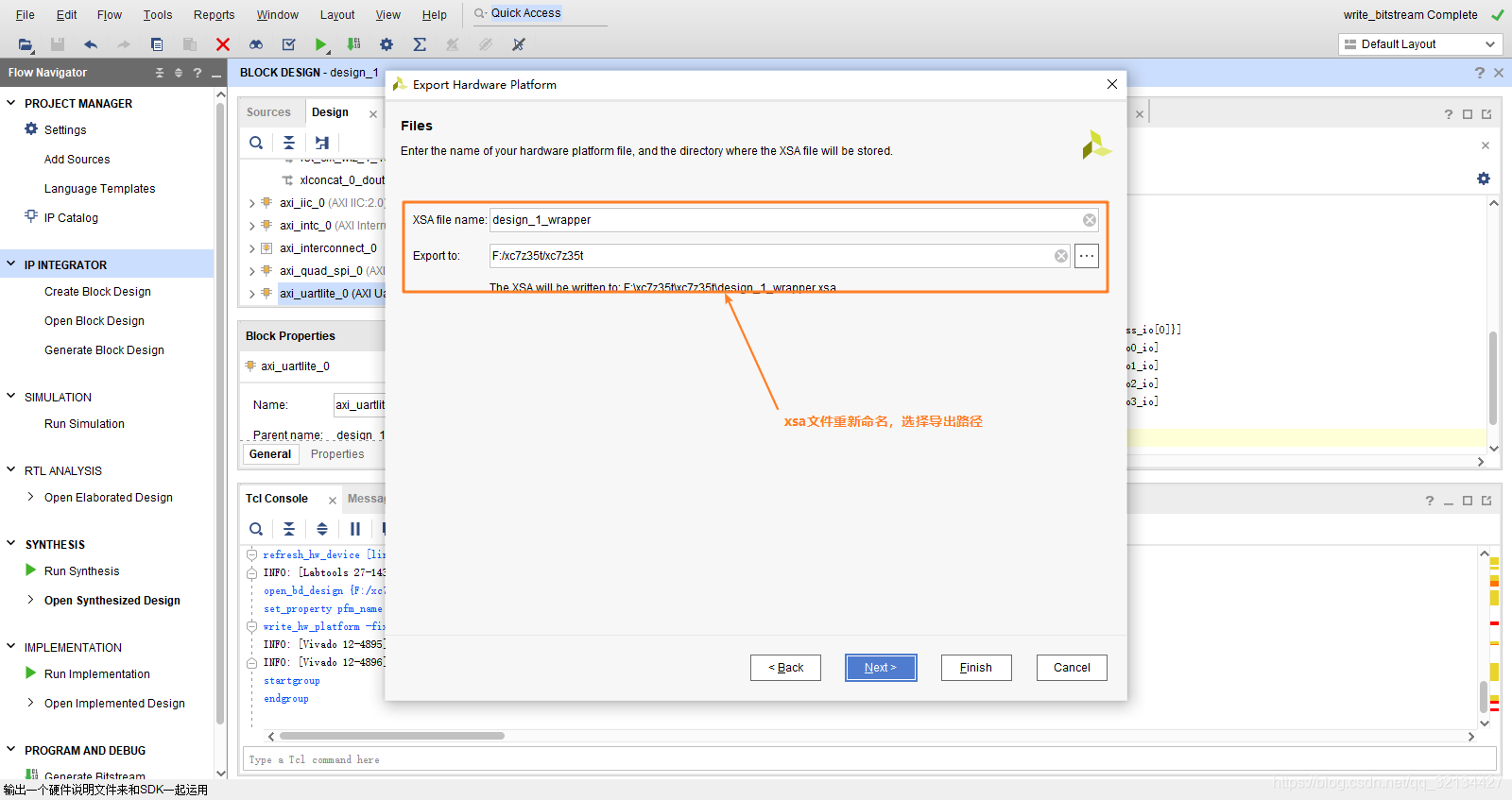
然后就一路next直到finish.
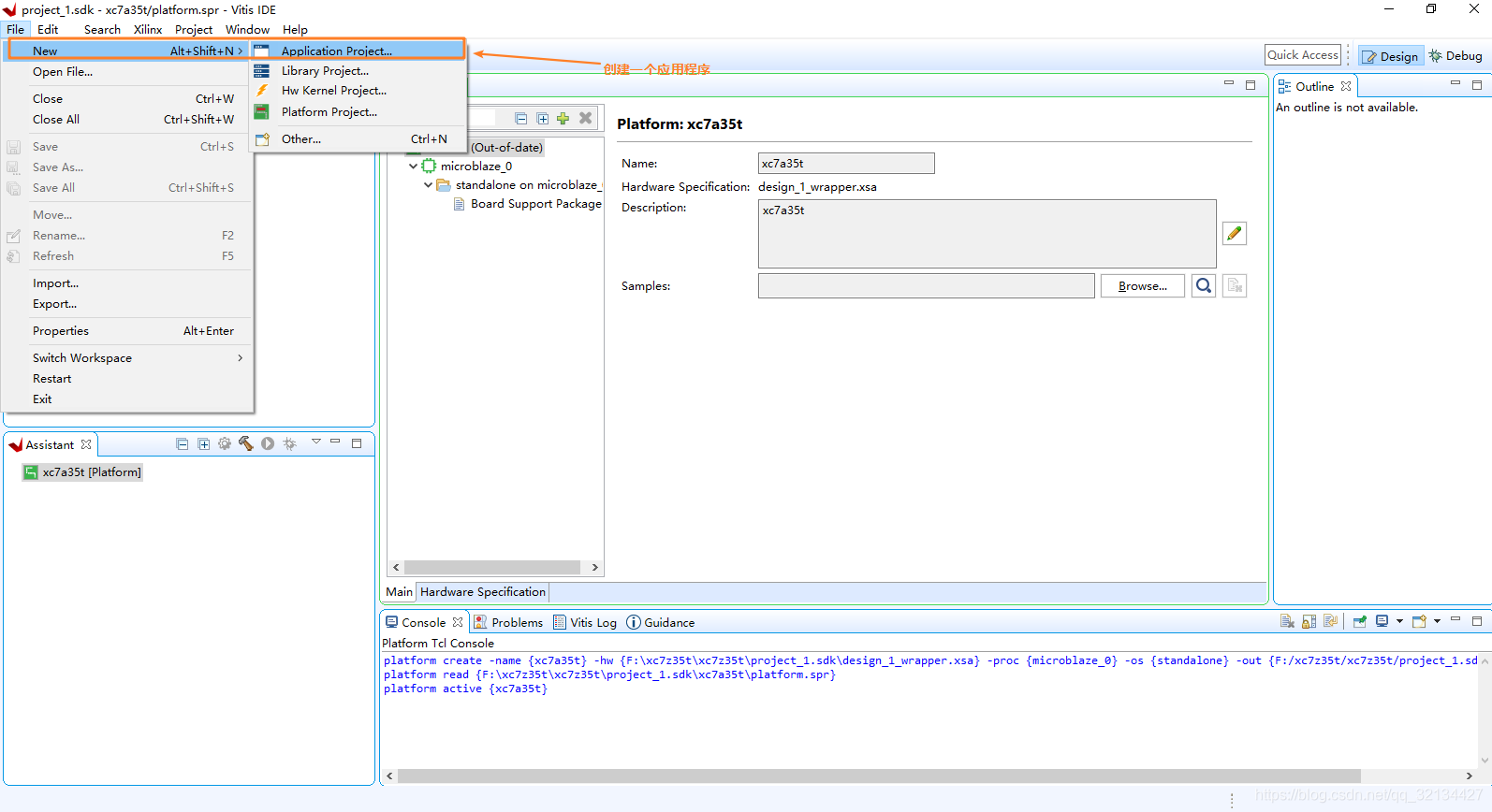
2.手动找到vitis的快捷方式进入vitis(vivado)中已经没有launch选项了,只能手动登录):
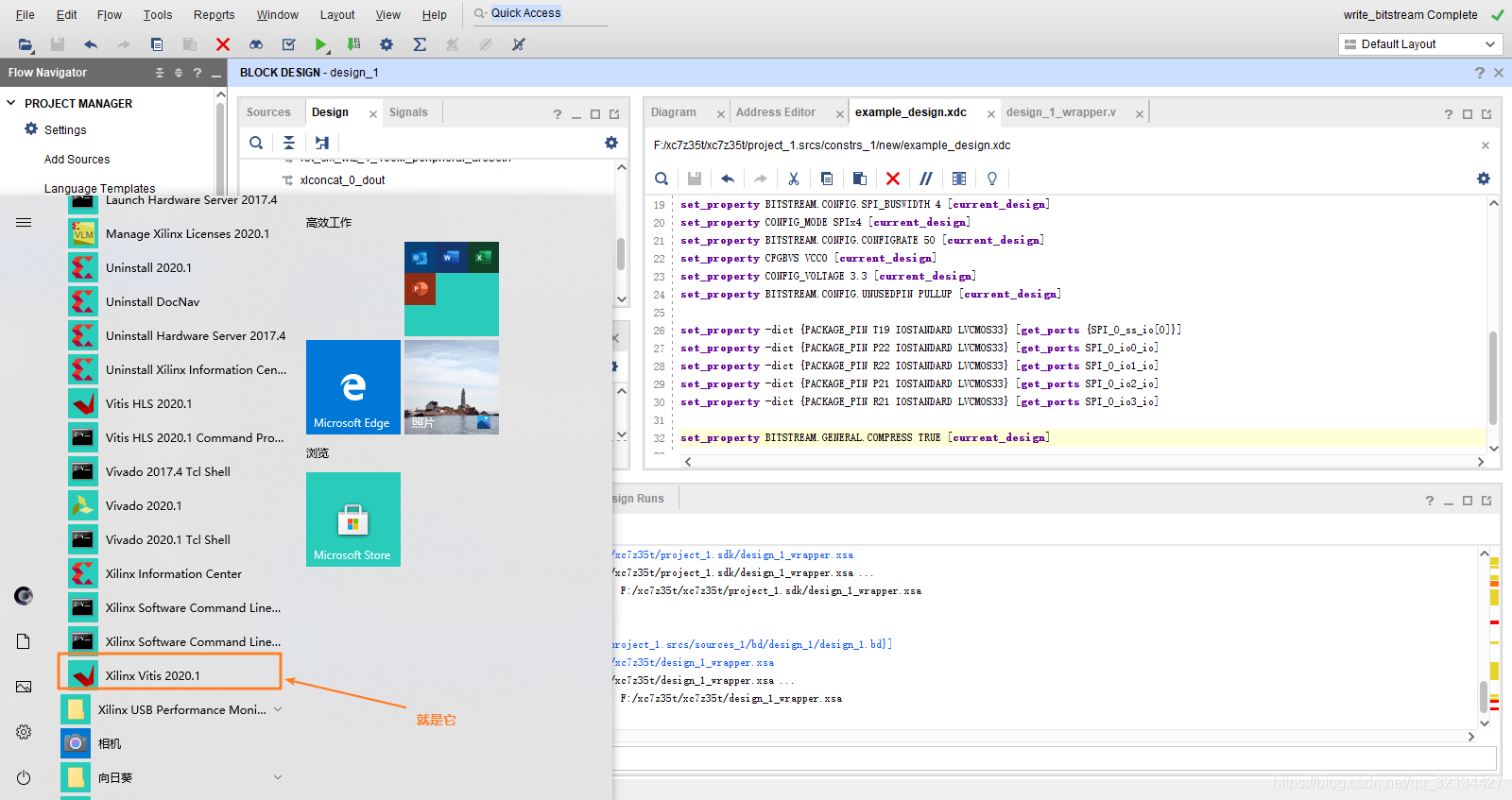
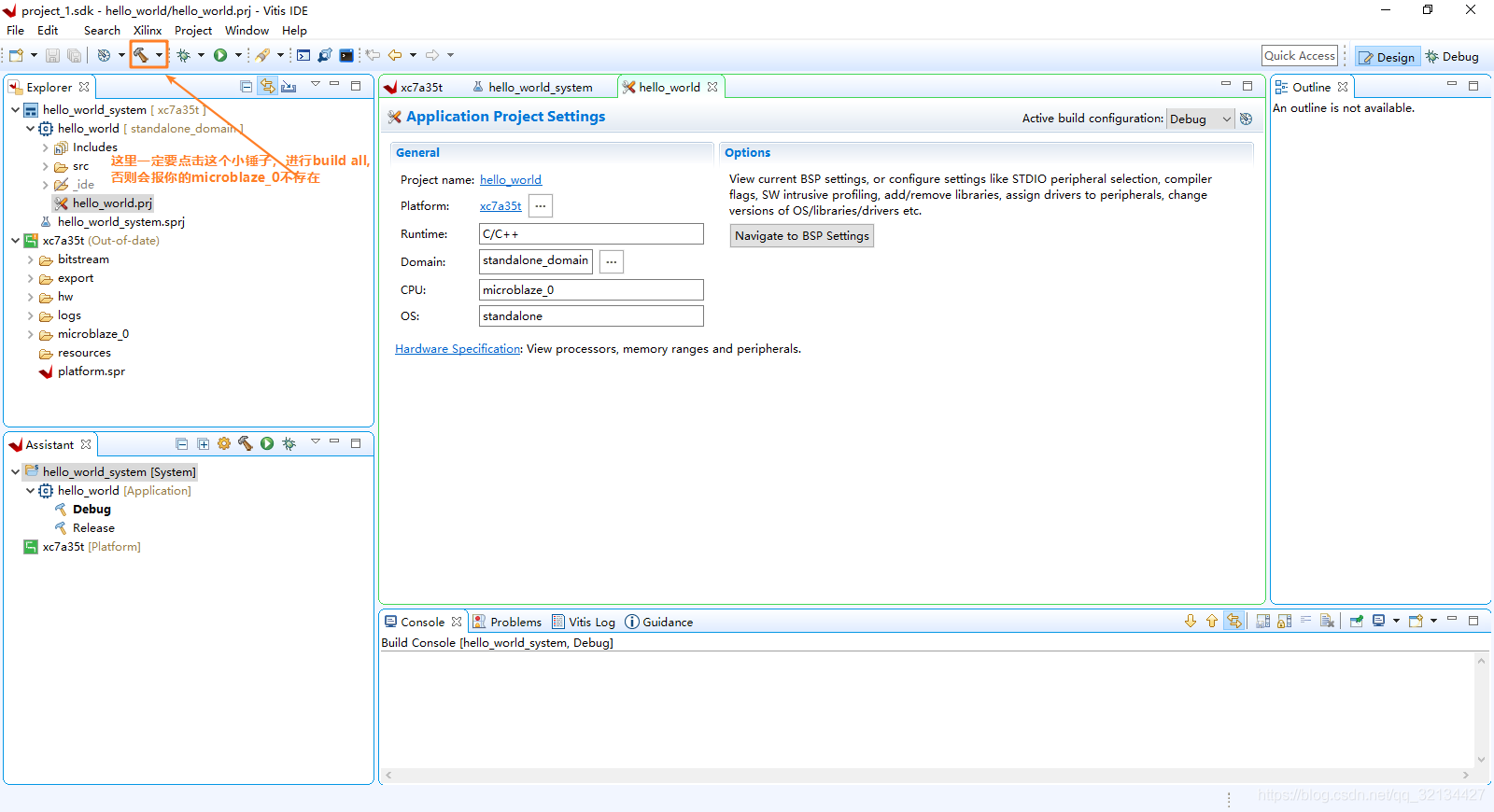
等待进度条跑完,我们就进入了vitis的主界面。
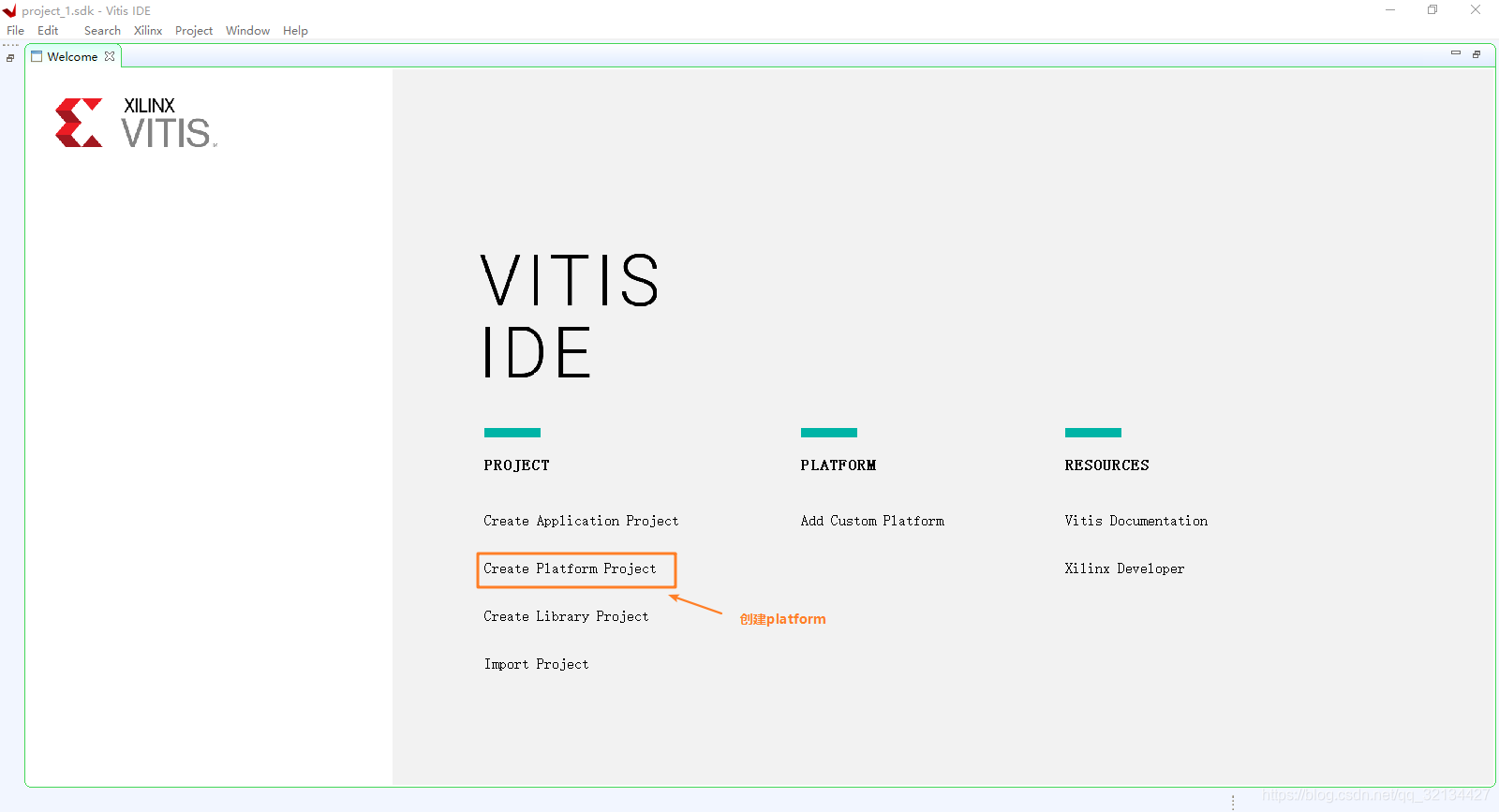
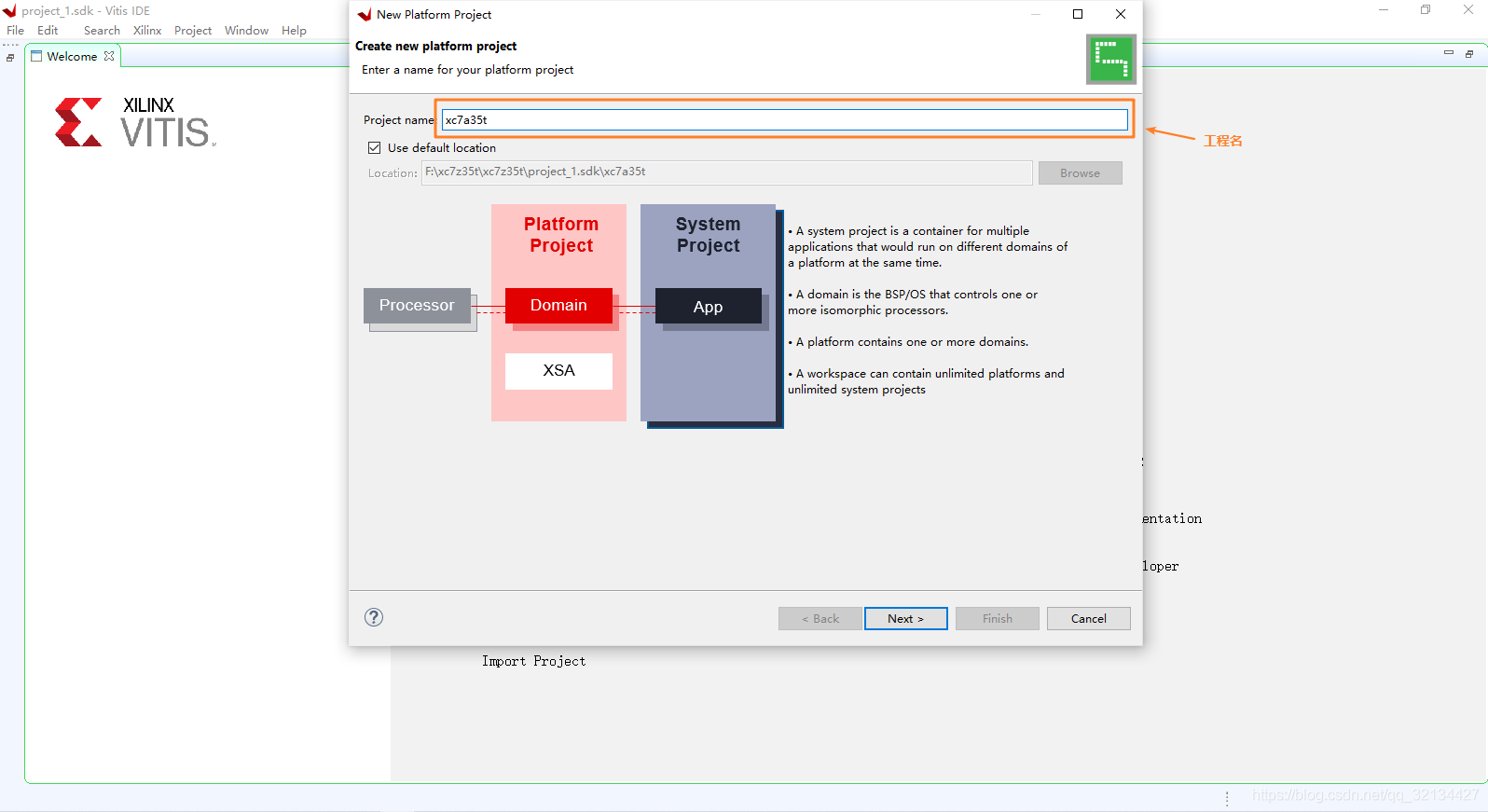
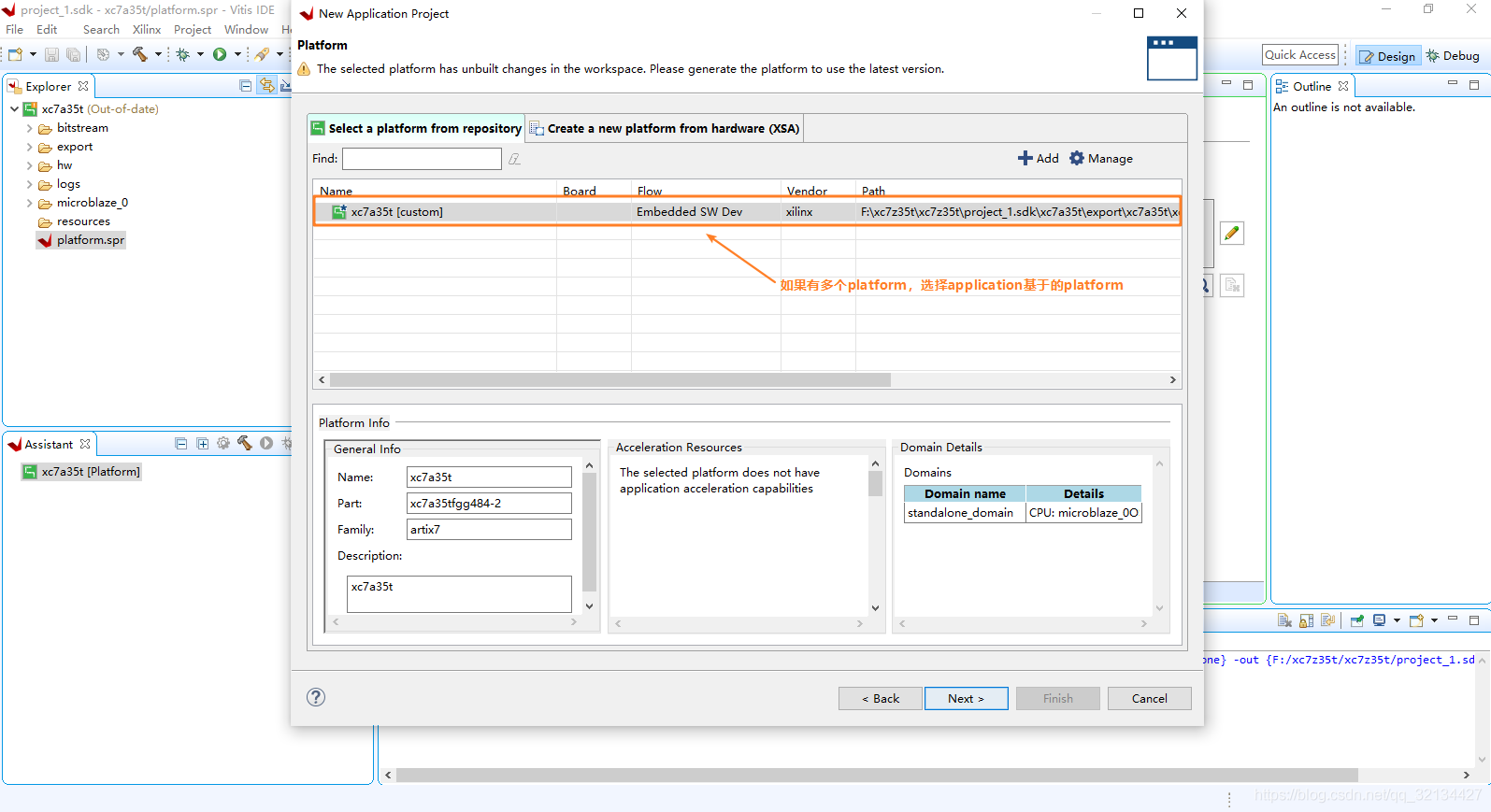
接下来我就不会配那么多文字了,按照图片一页一页操作吧:
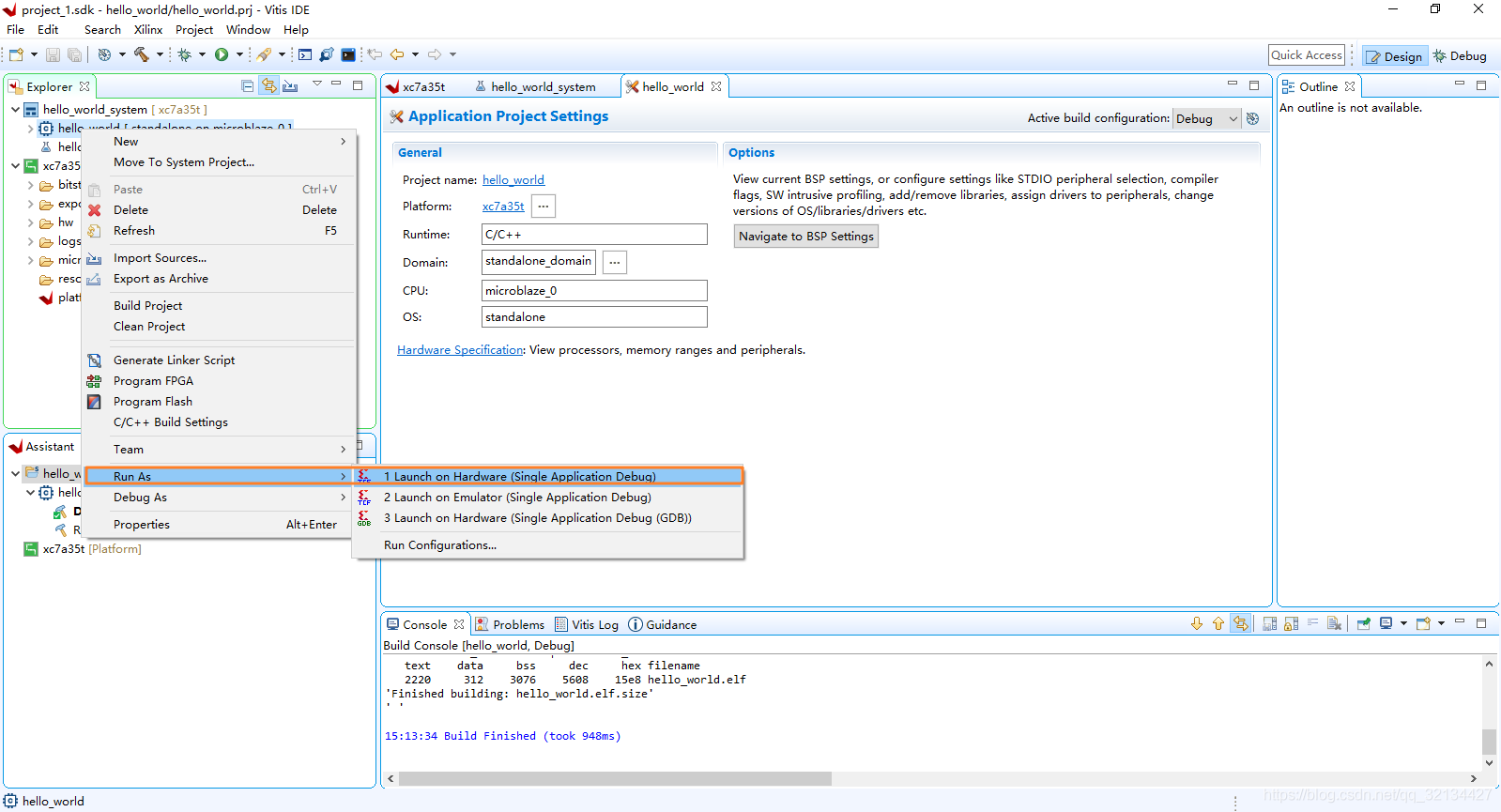

第15步:下载验证:
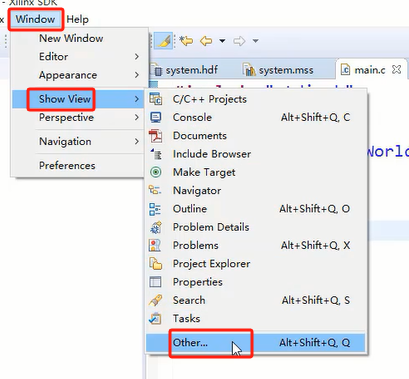
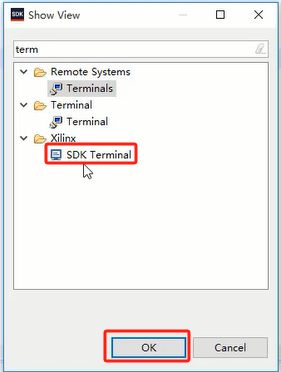
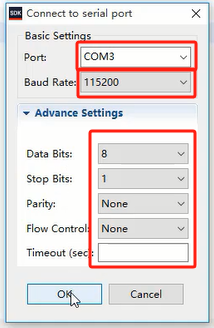
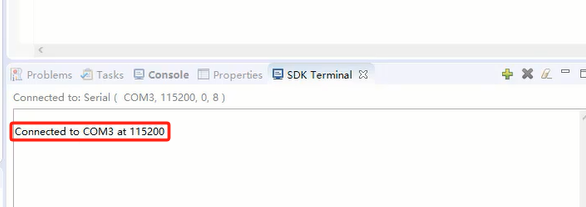
连接zynq:
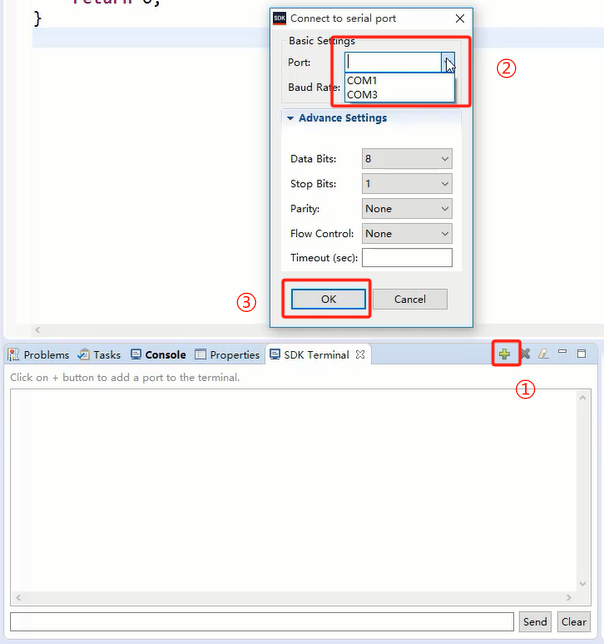
打开设备管理器确认串口位置:
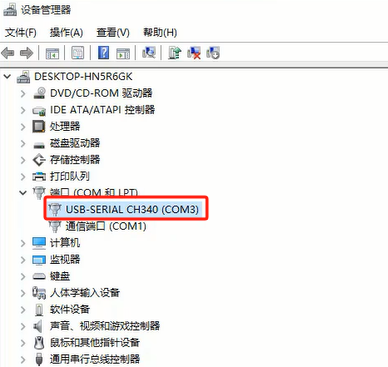
确认好端口、波特率。
在工程文件上方右键:
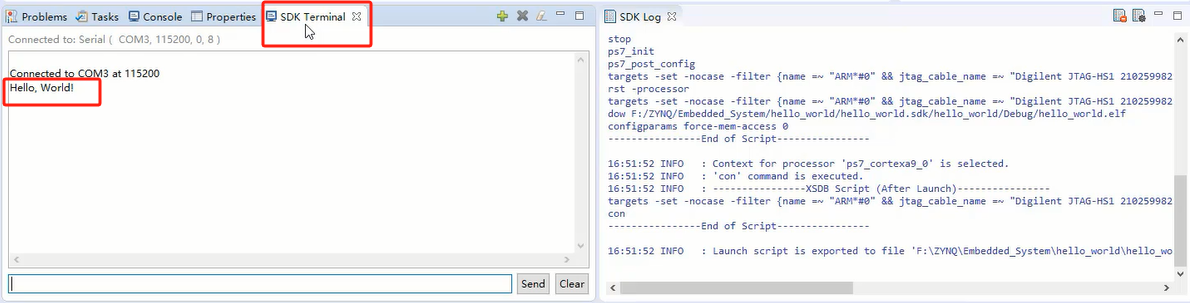
成功显示了 helloword,证明本次实验的结果是成功的
此程序是 ps端的程序通过串口输出给笔记本电脑的一个语句;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号